一种仿生六足四臂蟹形灾害作业机器人
本发明属于工业机器人,涉及一种仿生六足四臂蟹形灾害作业机器人。
背景技术:
1、目前的机器人发展按照机械足分类,可分为足式、轮式、履带式三类移动机器人;足式机器人相较于轮式机器人和履带式机器人对复杂工作地形具有更强的适应性且由于其多足的特性使得灵活性和稳定性也更强,在遭遇单腿损坏的情况下有足够的支撑足和驱动足来保证继续移动。但由于其多足的特性所以操控难度要高于轮式与履带式机器人,轮式和履带式机器人相较于轮式机器人越障能力强,地形适应性强、可负载重量大等优点,而且能够实现原地转弯。但履带式机器人移动速度相对较慢,工作效率低且噪音较大,无法适应于复杂路况下的快速救援要求。
技术实现思路
1、本发明的目的在于解决现有技术中机器人操控难度大,工作效率慢,无法适用于复杂路况的问题,提供一种仿生六足四臂蟹形灾害作业机器人。
2、为达到上述目的,本发明采用以下技术方案予以实现:
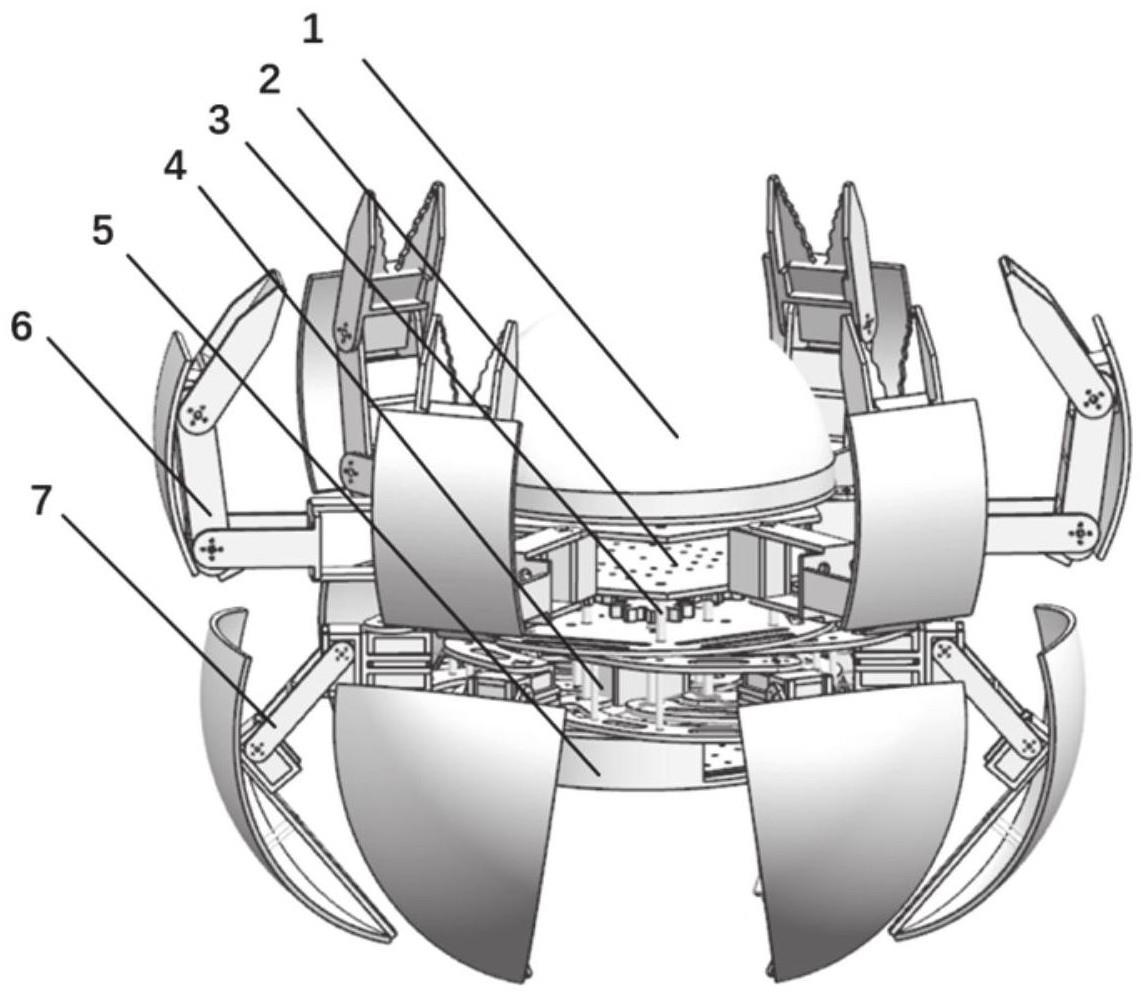
3、一种仿生六足四臂蟹形灾害作业机器人,包括:控制模块、机器人支撑模块、阿基米德旋线模块、机器人电源仓、机器人臂部模块和机器人腿部模块;
4、控制模块设置在机器人支撑模块的中间位置;阿基米德旋线模块设置在机器人支撑模块的下端,机器人腿部模块与阿基米德旋线模块进行相连,机器人臂部模块与机器人支撑模块连接;控制模块通过控制阿基米德旋线模块上的主舵机和机器人腿部模块的上各分舵机,进而控制机器人腿部模块的张开与闭合;控制模块通过控制机器人臂部模块上的各分舵机控制机器人臂部模块的张开与闭合;机器人电源仓设置在阿基米德旋线模块的下部,机器人电源仓向控制模块、阿基米德旋线模块、机器人臂部模块和机器人腿部模块进行供电。
5、本发明的进一步改进在于:
6、进一步的,机器人臂部模块包括臂部基节、臂部2号舵机、臂部胫节、臂部3号舵机、机器人操作手和臂部1号舵机;
7、臂部2号舵机和臂部3号舵机分别设置在臂部胫节两端;机器人操作手设置在臂部胫节上,且与臂部3号舵机位于同一端,臂部3号舵机与机器人操作手进行相连;臂部2号舵机与臂部基节进行连接,臂部1号舵机设置在机器人支撑模块上,臂部1号舵机与臂部基节进行连接;臂部3号舵机控制机器人操作手进行张开与闭合;臂部2号舵机控制臂部胫节进行张开与闭合;臂部1号舵机控制臂部基节进行左右移动;臂部1号舵机、臂部2号舵机和臂部3号舵机电连接控制模块,机器人电源仓向臂部1号舵机、臂部2号舵机和臂部3号舵机进行供电。
8、进一步的,机器人支撑模块包括第一面板和第二面板;第一面板和第二面板相对设置;臂部1号舵机设置在第一面板和第二面板的边缘处。
9、进一步的,机器人臂部模块还包括臂部外壳;臂部外壳为弧形结构,臂部胫节设置在臂部外壳的内弧面。
10、进一步的,阿基米德旋线模块包括第三面板、第四面板、阿基米德旋线传动舵机、阿基米德旋线传动齿轮装置和旋转架;
11、第三面板和第四面板相对设置,阿基米德旋线传动舵机和设置在第三面板和第四面板之间,旋转架的一端设置在第三面板和第四面板之间,旋转架的一端与机器人腿部模块相连接,阿基米德旋线传动齿轮装置设置在第三面板上,且阿基米德旋线传动齿轮装置分别与阿基米德旋线传动舵机和旋转架相连;阿基米德旋线传动舵机连接控制模块,机器人电源仓为阿基米德旋线传动舵机供电。
12、进一步的,第三面板和第二面板之间通过固定连杆进行支撑,固定连杆为若干个。
13、进一步的,阿基米德旋线传动齿轮装置包括中间齿轮和外部齿轮,外部齿轮设置在中间齿轮的周围,且外部齿轮和中间齿轮相互啮合;中间齿轮与阿基米德旋线传动舵机相连接,外部齿轮与旋转架进行连接;阿基米德旋线传动舵机带动中间齿轮进行转动,进而带动旋转架收缩或伸出至第三面板和第四面板之间。
14、进一步的,机器人腿部模块包括腿部1号舵机、腿部2号舵机、腿部3号舵机、腿部胫节和腿部跗节;
15、腿部基节和腿部3号舵机设置在腿部胫节的两端;腿部3号舵机与腿部跗节进行连接,腿部1号舵机与旋转架的另一端相连接;腿部1号舵机与腿部基节连接,腿部2号舵机设置在腿部基节上;腿部3号舵机带动腿部跗节进行收缩与张开,腿部2号舵机带动腿部胫节进行收缩与张开,旋转架带动腿部1号舵机进行转动,同时腿部1号舵机带动机器人腿部模块进行收缩与张开。
16、进一步的,机器人腿部模块还包括腿部外壳,腿部外壳为弧形结构,腿部跗节设置在腿部外壳的内弧面。
17、进一步的,臂部外壳和腿部外壳为sla光固化成型3d打印材料。
18、与现有技术相比,本发明具有以下有益效果:
19、本发明控制模块通过控制阿基米德旋线模块进而控制机器人腿部模块的张开与闭合,控制模块通过控制机器人臂部模块控制机械臂部模块的张开与闭合;本发明通过控制模块、阿基米德旋线模块、机器人臂部模块和机器人腿部模块等模块的相互配合,实现机器人行动模式的自由切换,进而能够适应不同路况,为各种救援场合和各种勘探任务提供有力的保障。仿生六足四臂蟹形灾害作业机器人的机械臂工作更加灵活,能够完成不同的动作,降低复杂环境的作业难度,能够有效的提高救援的成功率。
技术特征:
1.一种仿生六足四臂蟹形灾害作业机器人,其特征在于,包括:控制模块(1)、机器人支撑模块(2)、阿基米德旋线模块(4)、机器人电源仓(5)、机器人臂部模块(6)和机器人腿部模块(7);
2.根据权利要求1所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述机器人臂部模块(6)包括臂部基节(8)、臂部2号舵机(9)、臂部胫节(10)、臂部3号舵机(11)、机器人操作手(12)和臂部1号舵机(14);
3.根据权利要求2所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述机器人支撑模块(2)包括第一面板(25)和第二面板(26);所述第一面板(25)和第二面板(26)相对设置;所述臂部1号舵机(14)设置在第一面板(25)和第二面板(26)的边缘处。
4.根据权利要求3所的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述机器人臂部模块(6)还包括臂部外壳(13);所述臂部外壳(13)为弧形结构,所述臂部胫节(10)设置在臂部外壳(13)的内弧面。
5.根据权利要求4所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述阿基米德旋线模块(4)包括第三面板(27)、第四面板(28)、阿基米德旋线传动舵机(21)、阿基米德旋线传动齿轮装置(22)和旋转架(23);
6.根据权利要求5所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述第三面板(27)和第二面板(26)之间通过固定连杆(3)进行支撑,所述固定连杆(3)为若干个。
7.根据权利要求6所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述阿基米德旋线传动齿轮装置(22)包括中间齿轮和外部齿轮,所述外部齿轮设置在中间齿轮的周围,且外部齿轮和中间齿轮相互啮合;所述中间齿轮与阿基米德旋线传动舵机(21)相连接,所述外部齿轮与旋转架(23)进行连接;所述阿基米德旋线传动舵机(21)带动中间齿轮进行转动,进而带动旋转架(23)收缩或伸出至第三面板(27)和第四面板(28)之间。
8.根据权利要求7所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述机器人腿部模块(7)包括腿部1号舵机(15)、腿部2号舵机(16)、腿部3号舵机(17)、腿部胫节(18)和腿部跗节(19);
9.根据权利要求8所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述机器人腿部模块(7)还包括腿部外壳(20),所述腿部外壳(20)为弧形结构,所述腿部跗节(19)设置在腿部外壳(20)的内弧面。
10.根据权利要求9所述的仿生六足四臂蟹形灾害作业机器人,其特征在于,所述臂部外壳(13)和腿部外壳(20)为sla光固化成型3d打印材料。
技术总结
本发明公开了一种仿生六足四臂蟹形灾害作业机器人,包括:控制模块设置在机器人支撑模块的中间位置;阿基米德旋线模块设置在机器人支撑模块下端,机器人腿部模块与阿基米德旋线模块进行相连,机械臂部模块与机器人支撑模块连接;控制模块通过控制阿基米德旋线模块主舵机和机器人腿部模块上各分舵机,进而控制机器人腿部模块的张开与闭合;控制模块通过控制机器人臂部模块上各舵机控制机械臂部模块的张开与闭合;机器人电源仓设置在阿基米德旋线模块的下部。本发明通过控制模块、阿基米德旋线模块、机器人臂部模块和机器人腿部模块等模块之间的共同配合进而实现机器人行动模式的自由切换,能够适应不同路况,为各种救援场合和各种勘探任务提供有力的保障。
技术研发人员:赵闻,王颖琦,徐扬,刘贞报,付怡祺,黎栗谯,詹涵文,宋云飞
受保护的技术使用者:西北工业大学太仓长三角研究院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!