EPS系统控制方法、装置、电子设备及存储介质与流程
本发明涉及eps系统,尤其涉及一种eps系统控制方法、装置、电子设备及存储介质。
背景技术:
1、主动回正功能是电动助力转向系统(electric power steering,eps)的基本功能,其基本原理是:ecu(electronic control unit,ecu)单元根据方向盘偏离中心位置的角度,计算不同车速下的回正力的大小,并对转向电机发出指令使其输出力矩,控制方向盘停止转向且脱离驾驶员手部操控后主动回正到中心位置。
2、现有的回正策略通常采用回正力矩与助力直接叠加的方式,由于回正力矩与助力力矩方向相反,因此,驾驶员操控方向盘转向时既要克服转向系统的阻力,同时还应克服相反方向的回正力矩。驾驶员操控方向盘转过一定角度,如果试图停止转向保持方向盘在该位置,轻扶方向盘会明显感受到反向的拖拽感。或者,当驾驶员操控方向盘进入转向末端时,为提供轻便的手感,转向电机需要提供更大的助力以抵消回正力矩,这要求转向电机须具备更大的输出功率,因此对转向系统的空间和尺寸提出了更高的要求。另外,还可以引入驾驶员手力,作为输入参与回正力矩给定的计算,回正力大小与手力成反比,这种策略可以在一定程度上减轻驾驶员手部感受到的拖拽感,但是ecu无法有效的识别出驾驶员意图的情况下,转向电机在助力和回正的切换阶段收到的指令不明确,会出现控制方向的频繁切换,这不仅会给驾驶员带来手感的波动感,严重的情况方向盘会产生抖动,给驾驶员在回正车辆过程中造成困难。
技术实现思路
1、本发明实施例提供了一种eps系统控制方法、装置、电子设备及存储介质,以解决现有技术中eps在回正过程中出现控制方向的频繁切换的技术问题。
2、第一方面,本发明实施例提供了一种eps系统控制方法,包括:
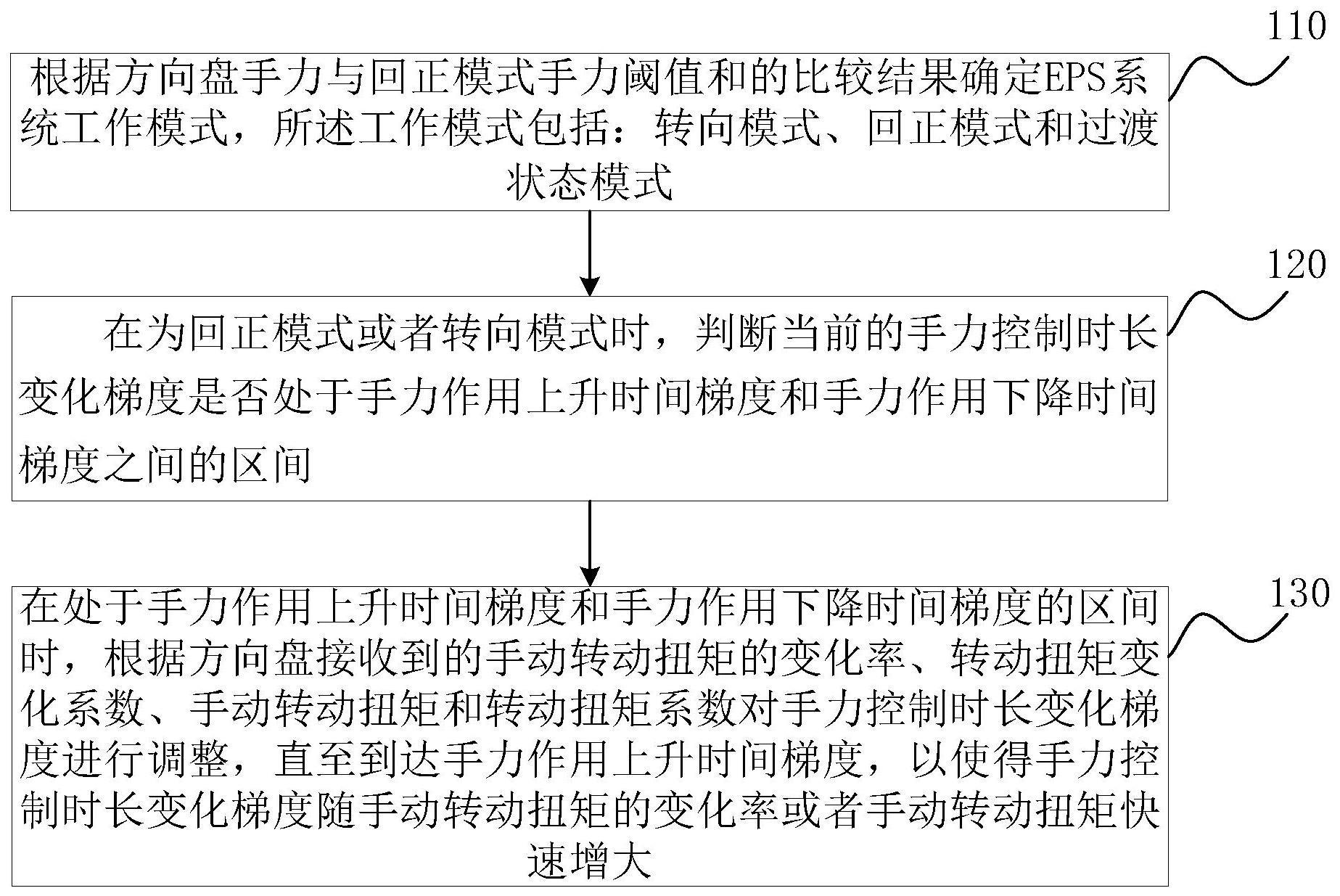
3、根据方向盘手力与回正模式手力阈值tmin和tmax的比较结果确定eps系统工作模式,所述工作模式包括:转向模式、回正模式和过渡状态模式;
4、在为回正模式或者转向模式时,判断当前的手力控制时长变化梯度是否处于手力作用上升时间梯度和手力作用下降时间梯度之间的区间,在处于手力作用上升时间梯度和手力作用下降时间梯度的区间时,根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,直至到达手力作用上升时间梯度,以使得手力控制时长变化梯度随手动转动扭矩的变化率或者手动转动扭矩快速增大。
5、第二方面,本发明实施例还提供了一种eps系统控制装置,包括:
6、工作模式确定模块,用于根据方向盘手力与回正模式手力阈值tmin和tmax的比较结果确定eps系统工作模式,所述工作模式包括:转向模式、回正模式和过渡状态模式;
7、调整模块,用于在为回正模式或者转向模式时,判断当前的手力控制时长变化梯度是否处于手力作用上升时间梯度和手力作用下降时间梯度之间的区间,在处于手力作用上升时间梯度和手力作用下降时间梯度的区间时,根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,直至到达手力作用上升时间梯度,以使得手力控制时长变化梯度随手动转动扭矩的变化率或者手动转动扭矩快速增大。
8、第三方面,本发明实施例还提供了一种电子设备,所述电子设备包括:
9、一个或多个处理器;
10、存储装置,用于存储一个或多个程序;
11、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上述实施例提供的任一所述的eps系统控制的方法。
12、第四方面,本发明实施例还提供了一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如上述实施例提供的任一所述eps系统控制方法。
13、本发明实施例提供的eps系统控制方法、装置、电子设备及存储介质,通过根据方向盘手力与回正模式手力阈值tmin和tmax的比较结果确定eps系统工作模式,所述工作模式包括:转向模式、回正模式和过渡状态模式;在为回正模式或者转向模式时,判断当前的手力控制时长变化梯度是否处于手力作用上升时间梯度和手力作用下降时间梯度之间的区间,在处于于手力作用上升梯度时间和下降梯度时间之间的区间时,根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,直至到达手力作用上述梯度时间,以使得手力控制时长变化梯度随手动转动扭矩的变化率或者手动转动扭矩快速增大。在通过方向盘受力确定为回正模式下,将回正时长分为起始、中间和结束三个阶段,并按照不同的手力控制时长变化梯度对回正进行控制,可避免错误判断驾驶员意图,产生转向和助力来回切换的情况。同时,在中间阶段,根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,直至到达手力作用上升时间梯度,可以在正常驾驶过程中根据驾驶员操作方向盘扭矩的大小调整梯度,并且可以实在现快速转向时能很快的使回正力降下来,切换到助力模式。便于在回正过程中辅助驾驶员实现对车辆的控制。
技术特征:
1.一种eps系统控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,采用如下方式实现:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述根据系统标定的手力作用上限时长、回正模式开始退出的起点时刻和回正完成退出的时刻计算回正切换系数,采用如下方式实现:
7.根据权利要求6所述的方法,其特征在于,所述根据所述回正切换系数计算得到限制回正模式切换系数,采用如下方式实现:
8.一种eps系统控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种包含计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于实现如权利要求1-7任一所述的eps系统控制方法。
技术总结
本发明实施例公开了一种EPS系统控制方法、装置、电子设备及存储介质,其中,所述方法包括:根据方向盘手力与回正模式手力阈值Τ<subgt;min</subgt;和Τ<subgt;max</subgt;的比较结果确定EPS系统工作模式,所述工作模式包括:转向模式、回正模式和过渡状态模式;在为回正模式或者转向模式时,判断当前的手力控制时长变化梯度是否处于手力作用上升时间梯度和手力作用下降时间梯度之间的区间,在处于手力作用上升时间梯度和手力作用下降时间梯度的区间时,根据方向盘接收到的手动转动扭矩的变化率、转动扭矩变化系数、手动转动扭矩和转动扭矩系数对手力控制时长变化梯度进行调整,直至到达手力作用上升时间梯度,以使得手力控制时长变化梯度随手动转动扭矩的变化率或者手动转动扭矩快速增大。
技术研发人员:沈敬祖,安海超,裴兵辉
受保护的技术使用者:天津德科智控股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!