一种履带式爬壁焊接机器人的制作方法
本发明涉及焊接机器人,具体涉及一种履带式爬壁焊接机器人。
背景技术:
1、由于大型钢结构件尺寸巨大、运输条件有限,一般情况下需要将焊接件运输至施工场地现场进行焊接。
2、传统的焊接方式为人工焊接,即由焊接工人爬至大型钢结构件上,再由焊接工人对钢结构进行焊接,此种焊接方式存在着效率低、任务繁重、焊缝质量不一、作业危险性高、作业环境差的情况,且因为焊接工程量大、焊接要求高、劳动密集程度高,导致愿意进入手工焊接行业的从业人员正在缓慢减少,因此在未来可能出现缺少足够的熟练焊接从业人员。
技术实现思路
1、本发明所要解决的技术问题是针对大型钢结构采用的仍然为人工焊接,目的在于提供一种履带式爬壁焊接机器人,实现了大型钢结构的焊接自动化。
2、本发明通过下述技术方案实现:
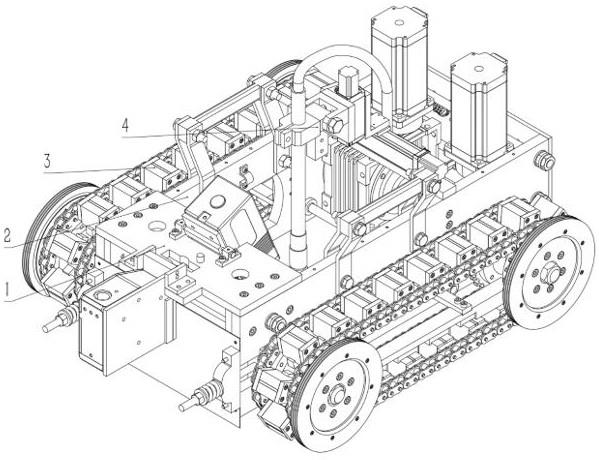
3、一种履带式爬壁焊接机器人,包括:
4、箱体部分;
5、焊缝检测部分,其固定设置在所述箱体部分的一端;
6、焊接部分,其固定设置在所述箱体部分的另一端;
7、履带部分,其设置在所述箱体部分的两侧,且驱动所述箱体部分沿焊缝方向移动;
8、所述履带部分包括轮毂组件和磁块链条,所述轮毂组件包括驱动轮组件和从动轮组件,所述磁块链条组件包括链条和磁块组件,所述链条连接在所述驱动轮组件和所述从动轮组件上,多个所述磁块组件与所述链条固定连接;
9、使用时,所述磁块链条吸附于待焊接的大型钢结构件。
10、具体地,所述箱体部分包括:主箱体、驱动部分和履带张紧部分,所述履带张紧部分和所述驱动部分分别设置在所述主箱体的两端;
11、所述主箱体包括左右侧箱体板、左右侧连接杆、挡光板和后板,两个左右侧箱体板对称设置且通过所述左右侧连接杆固定连接,所述挡光板固定设置在所述左右侧箱体板的前端,所述后板固定设置在所述左右侧箱体板的后端;
12、所述履带张紧部分包括:从动轴、张紧滑块、张紧滑块定位螺杆和限位弹簧,所述左右侧箱体板的前段设置有前后朝向的滑槽,两个所述张紧滑块分别设置在两个所述滑槽内并可沿所述滑槽前后滑动,所述从动轴通过从动轮轴套与两个所述张紧滑块可转动连接,所述左右侧箱体板的前端端面连接有张紧滑块定位端,所述张紧滑块定位螺杆的后端与所述张紧滑块固定连接,所述张紧滑块定位螺杆的前端穿过所述张紧滑块定位端与所述限位弹簧连接,所述限位弹簧对所述张紧滑块定位螺杆施加向前的作用力;
13、所述驱动部分包括:驱动轴、驱动步进电机和减速机,两个所述驱动轴分别通过驱动轴轴套和深沟球轴承与所述左右侧箱体板的后端可转动连接,两个所述驱动步进电机的转矩输出轴通过所述减速机分别驱动两个所述驱动轴转动。
14、可选地,所述箱体部分还包括把手部分,所述把手部分与所述左右侧箱体板的中部固定连接;
15、所述左右侧箱体板的内侧面设置有走线环。
16、具体地,所述驱动轮组件与所述驱动轴连接,所述从动轮组件与所述从动轴连接;
17、所述驱动轮组件包括:驱动轮轮毂、驱动轮履带齿轮、驱动轮轮毂外圈和驱动轮轮毂内圈,所述驱动轮轮毂与所述驱动轴连接,两个驱动轮履带齿轮与所述驱动轮轮毂的两端固定连接,所述驱动轮轮毂内圈连接与所述驱动轮轮毂,所述驱动轮外圈连接与所述驱动轮轮毂内圈;
18、所述从动轮组件包括:从动轮轮毂、从动轮履带齿轮、从动轮轮毂外圈和从动轮轮毂内圈,所述从动轮轮毂与所述从动轴连接,两个从动轮履带齿轮与所述从动轮轮毂的两端固定连接,所述从动轮轮毂内圈连接与所述从动轮轮毂,所述从动轮轮毂外圈连接与所述从动轮轮毂内圈;
19、两个所述链条分别设置在所述驱动轮轮毂/所述从动轮轮毂的两侧,且两个所述驱动轮履带齿轮和两个所述从动轮履带齿轮分别连接两个所述链条。
20、具体地,多个所述磁块组件分别设置在两个所述链条之间,所述磁块组件包括:圆柱形磁铁、磁铁外壳、黄铜隔磁条和磁块链条连接板,两个所述磁铁外壳的相接面设置有与所述圆柱形磁铁适配的弧形槽,所述圆柱形磁铁槽固定设置在由所述弧形槽构成的圆柱腔内,且两个所述磁铁外壳之间设置有黄铜隔磁条,所述磁条外壳的两端通过所述磁块链条连接板与所述链条的链条节固定连接。
21、可选地,所述箱体部分还包括设置在所述左右侧箱体板两侧的磁块导向部分,所述磁块导向部分包括导向连接件和导向连接槽,所述导向连接槽水平设置在所述从动轮组件和所述驱动轮组件之间,且所述导向连接槽通过所述导向连接件与所述左右侧连接板固定连接,所述磁块组件上固定连接有与所述导向连接槽适配的磁块导向连接板。
22、具体地,所述焊缝检测部分包括:焊接检测支架、线结构光相机、线结构光相机支架、熔池相机和熔池相机支架,所述焊接检测支架与所述箱体部分固定连接,所述线结构光相机通过所述线结构光相机支架与所述焊接检测支架固定连接,所述熔池相机通过所述熔池相机支架与所述焊接检测支架固定连接;
23、所述线结构光相机设置在所述熔池相机的前方。
24、具体地,所述焊接部分包括:焊接连接板、y轴方向导向机构、z轴方向导向机构、焊枪俯仰夹持部分和焊枪,所述y轴方向导向机构的固定端通过所述焊接连接板与所述箱体部分固定连接,所述z轴方向导向机构的固定端与所述y轴方向导向机构的移动端固定连接,所述焊枪俯仰夹持部分与所述z轴方向导向机构的移动端固定连接,所述焊枪俯仰夹持部分用于夹持所述焊枪,且控制所述焊枪对准焊缝进行焊接;
25、所述y轴方向导向机构的移动方向、所述z轴方向导向机构的移动方向和机器人的前进方向之间两两垂直设置。
26、可选地,所述y轴方向导向机构包括所述y轴方向滚珠丝杠和y轴方向步进电机,所述z轴方向导向机构包括z轴方向滚珠丝杠和z轴方向步进电机;
27、所述y轴方向导向机构用于调整焊枪沿焊缝宽度方向的移动,所述z轴方向导向机构用于调整焊枪沿所述焊缝高度方向的移动,所述焊枪俯仰夹持部分用于调整焊枪相对于焊缝的角度。
28、可选地,所述后板上设置有航空插头接口,所述焊接机器人还包括控制柜,所述控制柜通过缆线和所述航空插头连接至所述航空插头接口,所述控制柜包括柜台、显示器、主机、输入元件、相关按钮、步进电机驱动器和电源组件,所述控制柜用于接受所述焊缝检测部分获取的信息,根据获取的信息控制所述驱动部分的动作,控制所述焊接部分的焊枪的位姿和焊接。
29、本发明与现有技术相比,具有如下的优点和有益效果:
30、本发明通过履带部分带式箱体部分在大型钢结构件上移动,并通过焊接检测部分对待焊接的焊缝进行检测,再通过焊接部分对焊缝进行焊接,从而实现针对大型钢结构件的自动焊接,提高焊接效率和焊缝质量,提高施工安全性和施工效率;
31、本发明的履带部分通过轮毂组件驱动磁块链条移动,磁块组件内的永磁体能够吸附在大型钢结构上,拥有了小范围的越障能力,提高了履带式爬壁机器人的灵活性、安全性和控制精度。
- 还没有人留言评论。精彩留言会获得点赞!