一种基于云台高度控制切换双模式的轮足式悬架结构
本发明属于机器人,尤其涉及一种基于云台高度控制切换双模式的轮足式悬架结构。
背景技术:
1、从云台高度控制和载重量限制来看,在机器人完成物流、巡检等任务时,需要考虑到环境因素对机器人的影响。
2、首先,云台高度控制是机器人在执行任务时需要注意的一个问题。在实际应用中,不同场景中的障碍物高度不同,如果机器人不能适应不同高度的障碍物,将会导致机器人无法顺利完成任务。此时,云台高度控制就能够很好地应对这种情况。通过调整云台高度,机器人可以克服一些障碍物,保证任务的高效完成。
3、其次,载重量限制也是需要注意的一个问题。对于不同的物品或设备,其重量是不同的,如果机器人超载了,可能会造成机器人性能下降、机器人崩溃等情况。因此,载重量限制是非常重要的。在实际应用中,机器人应该严格按照制造商规定的载重范围进行搬运或运输,避免对机器人造成负担和损害。
4、综上所述,云台高度控制和载重量限制等因素都是影响机器人在物流、巡检等领域中执行任务的因素之一。而现如今的在使用的物流巡检机器人并不具备同时兼具优良的载重性能以及适应不同场景的云台升降能力。
技术实现思路
1、本发明要解决的技术问题是:为了克服现有技术中云台高低调整避障的同时不具备优良的重载能力的问题,现提供一种基于云台高度控制切换双模式的轮足式悬架结构。
2、为解决上述技术问题,本发明采用如下技术方案:一种基于云台高度控制切换双模式的轮足式悬架结构,包括:
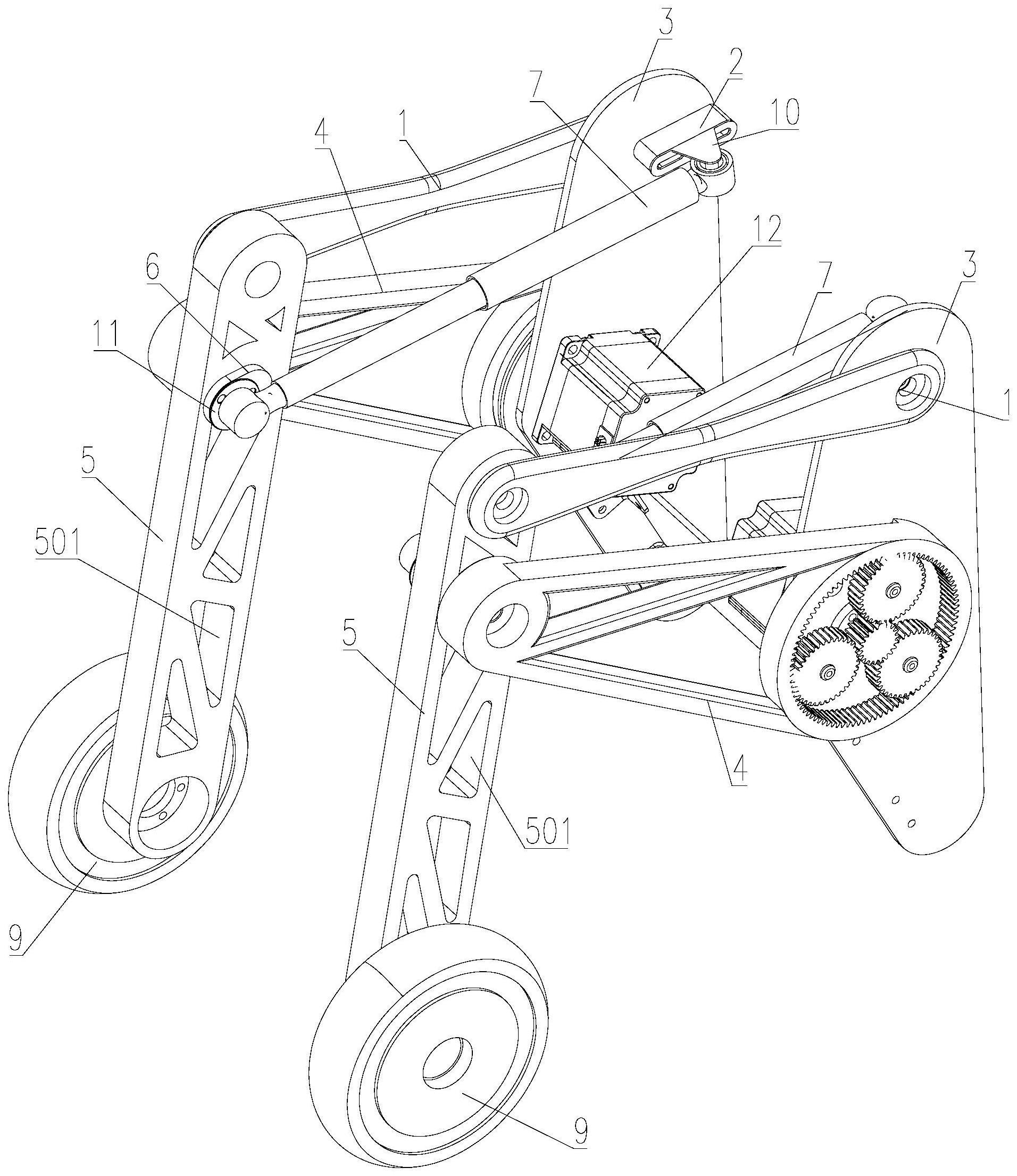
3、四连杆机构,其成对设置,包括依次连接的脚趾杆件、辅助连接杆、云台构件及小腿杆件,且小腿杆件远离云台构件的一端与脚趾杆件连接;两个四连杆机构中的两个云台构件之间设有连接板,两个云台构件与连接板构成云台,所述云台通过云台电机驱动;
4、三连杆机构,其成对设置,且与四连杆机构一一对应,其包括气弹簧,所述气弹簧与脚趾杆件之间连接有下摇杆,气弹簧与云台构件之间连接有上摇杆;
5、当云台构件高度降低,脚趾杆件与气弹簧所形成的的夹角变小,气弹簧所在直线与上摇杆及下摇杆所在直线运动到重合位置且气弹簧受压时,三连杆机构进入机械死点极限位置状态,结构受力,四连杆机构从松弛状态退出,此时气弹簧接入减震系统,与云台电机同时完成悬架的避震、承重功能,此时实现模式一。
6、当云台构件高度升高时,脚趾杆件与气弹簧所形成的的夹角变大,气弹簧所在直线与上摇杆及下摇杆所在直线脱离重合位置,故而在这个状态下平面四杆机构会随着云台的升降做自由运动,不接入云台的减震系统,此时实现模式二,完成云台在高位时由电机独自完成控制调节。
7、双模式结构的实现逻辑为在云台位于高处时,整体轮足式悬架处于平稳性能较差,减震性能较好的状态,此时悬架宜处于轻载状态,故四连杆机构随着云台的升降而改变其结构状态,整体处于松弛的状态,并不受力;当云台高度降低时,悬架处于平稳性较好,减震性能较差的状态,此时宜处于重载状态,故四连杆机构随着云台高度的改变,上下俩摇杆与气弹簧所处直线重合,气弹簧受力,三连杆机构接入悬架系统,大大增强了悬架的载重性能以及缓冲能力。
8、上述技术方案通过复合的三连杆机构及平面四杆机构,在云台电机的控制下四杆机构通过云台高度基于机械限位完成双模式调节,配合机器人轨迹运动,实现避障和优良载重性能的整合,实现了在云台轻载时,位于高位的云台更容易获得优良的机动性能以及避障能力,而在云台重载时,通过降低云台高度,使得平面四连杆机构进入极限位置状态死点,从而将气弹簧接入悬架系统,达成优良的重载性能,从而实现“避障-载重”双模式功能,并基于此,实现对于悬架避障性能、减震效果和更优良承重性能的整合。
9、进一步的,所述辅助连接杆的横截面积自两端向中间逐渐减小,减少了材料的使用量和组件的重量。
10、进一步的,所述脚趾杆件开设有若干减重孔,实现了轻量化。
11、进一步的,所述上摇杆与气弹簧的铰接点的轴线和下摇杆与气弹簧的铰接点的轴线垂直。
12、进一步的,所述脚趾杆件与小腿杆件的铰接点和下摇杆与脚趾杆件的铰接点重合,所述辅助连接杆与云台构件的铰接点和上摇杆与云台构件的铰接点重合,当处于模式一时,上摇杆、下摇杆及气弹簧抵在四连杆机构的相对的两个拐角上,从而使悬架结构具有更大的承重能力且稳定性更高。
13、进一步的,所述上摇杆为偏心结构,其上开设有第一腰型槽,上摇杆与气弹簧之间设有上连接件,所述上连接件上开设有第二u型槽,螺栓穿过第一腰型槽及第二u型槽实现上摇杆及上连接件的固定。
14、进一步的,所述下摇杆为凸轮结构,下摇杆与气弹簧之间设有下连接件。
15、本发明的有益效果是:本发明通过复合的三连杆机构及平面四杆机构,实现了在云台轻载时,位于高位的云台更容易获得优良的机动性能以及避障能力,而在云台重载时,通过降低云台高度,使得平面四连杆机构进入极限位置状态,从而将气弹簧接入悬架系统,达成优良的重载性能,从而实现“避障-载重”双模式功能,并基于此,实现对于悬架避障性能、减震效果和更优良承重性能的整合。
技术特征:
1.一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:包括:
2.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述辅助连接杆(1)的横截面积自两端向中间逐渐减小。
3.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述脚趾杆件(5)开设有若干减重孔(501)。
4.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述下摇杆(6)与气弹簧(7)的铰接点的轴线和上摇杆(2)与气弹簧(7)的铰接点的轴线垂直。
5.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述脚趾杆件(5)与小腿杆件(4)的铰接点和下摇杆(6)与脚趾杆件(5)的铰接点重合,所述辅助连接杆(1)与云台构件(3)的铰接点和上摇杆(2)与云台构件(3)的铰接点重合。
6.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述上摇杆(2)为偏心结构,上摇杆(2)与气弹簧(7)之间设有上连接件(10)。
7.根据权利要求1所述的一种基于云台高度控制切换双模式的轮足式悬架结构,其特征在于:所述下摇杆(6)为凸轮结构,下摇杆(6)与气弹簧(7)之间设有下连接件(11)。
技术总结
本发明属于机器人技术领域,尤其涉及一种基于云台高度控制切换双模式的轮足式悬架结构,包括四连杆机构及三连杆机构,三连杆机构包括气弹簧,气弹簧与脚趾杆件之间连接有下摇杆,气弹簧与云台构件之间连接有上摇杆;当云台构件高度降低,气弹簧、上摇杆及下摇杆位于同一直线上且气弹簧受压,此时气弹簧与云台电机同时完成悬架的承重功能;当云台构件高度升高,气弹簧、上摇杆及下摇杆不位于同一直线,气弹簧处于松弛状态,此时由云台电机独自完成悬架的承重功能;本发明通过复合的三连杆机构及平面四杆机构,实现了在云台电机的控制下四杆机构通过云台高度基于机械限位完成双模式调节,配合机器人轨迹运动,实现避障和优良载重性能的整合。
技术研发人员:王明轩,潘国威,张宏鑫,韦孟言,毛竟先,薛子盛,孙健超,袁天豪
受保护的技术使用者:常州大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!