一种具备自主行驶与避障的磁吸附爬壁机器人的制作方法
本申请涉及机器人领域,特别涉及一种具备自主行驶与避障的磁吸附爬壁机器人。
背景技术:
1、爬壁机器人可以在垂直墙壁上攀爬并完成作业的自动化机器人,爬壁机器人又称为壁面移动机器人,爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种,其中负压方式可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制,永磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。
2、目前大量的磁吸附爬壁机器人在船舶等行业被大量使用,但是一般的爬壁机器人在遇到障碍物时,往往无法自主判断正确路线,且无法通过改变自身形态适应环境,需要人工介入引导机器人行驶,导致其工作效率降低。
3、对此,我们提出了一种具备自主行驶与避障的磁吸附爬壁机器人来解决上述问题。
技术实现思路
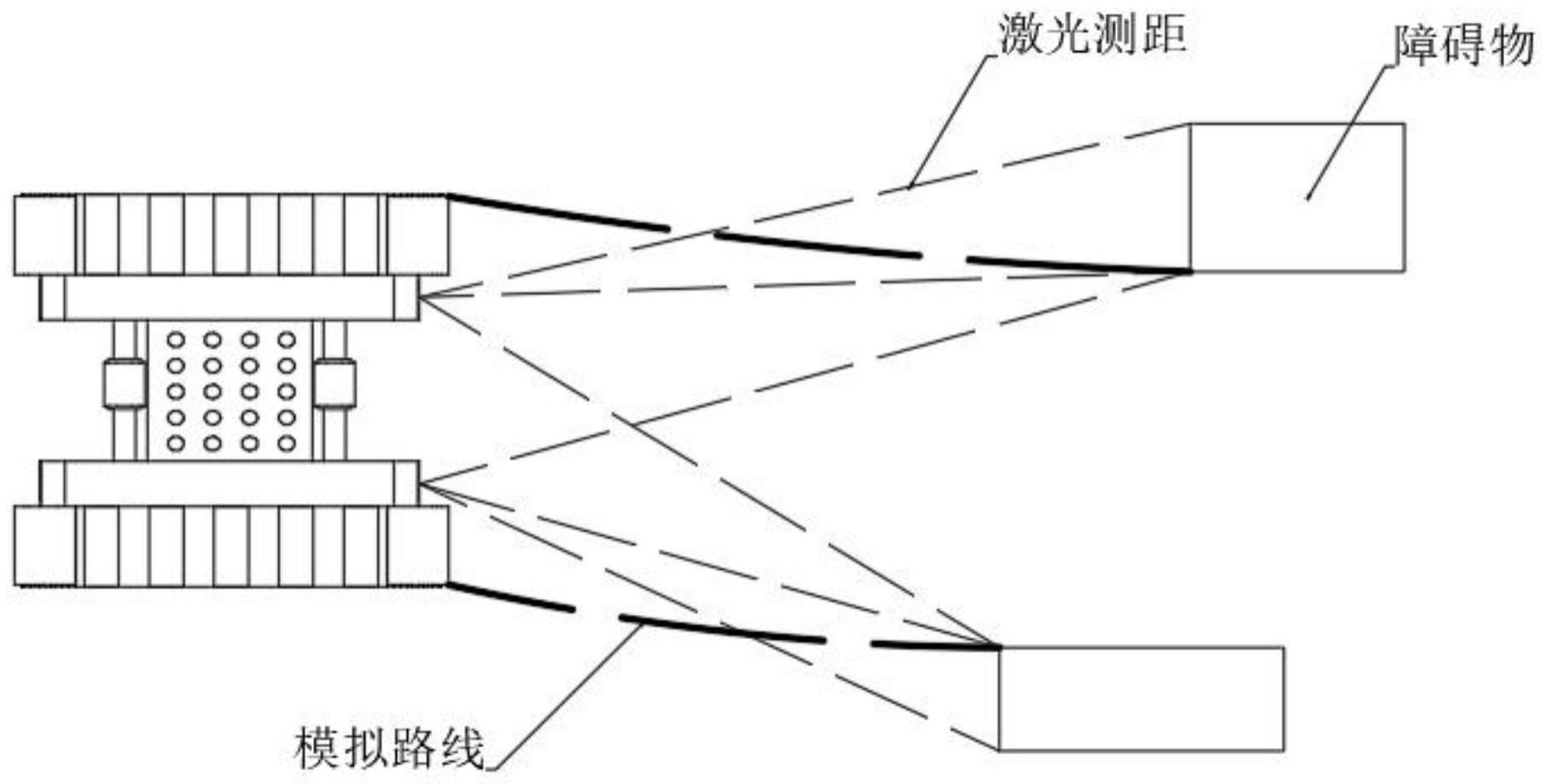
1、本申请目的在于使得机器人改变自身形态以适应行驶环境,同时具备自主判断正确路线的能力,相比现有技术提供一种具备自主行驶与避障的磁吸附爬壁机器人,包括变形车身,变形车身包括一对分体,分体内部设置有控制模块,控制模块电性连接有安装于分体前后侧壁的激光测距仪,分体上端安装有电性连接于控制模块的摄像头,分体之间通过一对双向伸缩组件相互连接,双向伸缩组件包括中间的固定柱,固定柱左右两端均设置有电动伸缩杆,电动伸缩杆远离固定柱一端与分体固定连接,分体内部安装有一对伺服电机,伺服电机输出端贯穿分体外壁并固定连接有行进轮,行进轮外壁啮合连接有磁吸履带,通过一对双向伸缩组件使得分体向中间收缩,从而改变机器人的形态使其适应前方的路障,可以不改变路线轻松的通过狭窄地段,节约了绕行的时间,提高了机器人的工作效率。
2、进一步的,分体下端安装有支撑轮,支撑轮包括液压杆,液压杆下端通过电动转轴转动连接有万向轮,支撑轮电性连接于控制模块,在机器人正常行驶的过程中,支撑轮处于收缩状态,当机器人检测到壁面较为粗糙时,为了降低磁吸履带的磨损,可以控制液压杆伸出并抵触在壁面,降低磁吸履带与壁面之间的压力或者使得磁吸履带与壁面之间略微脱离接触,从而有效保护了磁吸履带。
3、进一步的,万向轮的方向在机器人行进时与其前进方向一致,利用万向轮为机器人提供部分支撑力,减少了磁吸履带受到的磨损。
4、进一步的,分体相对侧壁开设有活动槽,活动槽内部活动安装有装载板,装载板与活动槽紧密连接,装载板上开设有多个预装孔,机器人在变形时装载板可以嵌入活动槽中,提高了机器人整体性的同时,减少了对变形的限制作用。
5、进一步的,磁吸履带包括内外层布置的内履带和外履带,内履带与外履带之间通过卡扣固定连接,外履带外壁嵌设多个电磁板,多个电磁板分别被控制模块控制,使得接触面的电磁板才会参与工作,并随着机器人的行进依次改变电磁板的磁吸力大小,降低了机器人的能量消耗,提高了工作效率。
6、进一步的,外履带外壁开设有多道防滑槽,外履带采用橡胶材料制成,防滑槽可以增加摩擦力提高稳定性。
7、进一步的,行进轮外侧壁开设有多个环形减重槽。
8、相比于现有技术,本申请的优点在于:
9、(1)通过一对双向伸缩组件使得分体向中间收缩,从而改变机器人的形态使其适应前方的路障,可以不改变路线轻松的通过狭窄地段,节约了绕行的时间,提高了机器人的工作效率,利用摄像头和激光测距仪对前方的道路进行识别和分析,判断出最佳通过路径以及通过方式,减少工作人员繁琐的操作。
10、(2)在机器人正常行驶的过程中,支撑轮处于收缩状态,当机器人检测到壁面较为粗糙时,为了降低磁吸履带的磨损,可以控制液压杆伸出并抵触在壁面,降低磁吸履带与壁面之间的压力或者使得磁吸履带与壁面之间略微脱离接触,从而有效保护了磁吸履带,延长了其使用寿命。
11、(3)接触面的电磁板才会参与工作,并随着机器人的行进依次改变电磁板的磁吸力大小,降低了机器人的能量消耗,提高了工作效率。
技术特征:
1.一种具备自主行驶与避障的磁吸附爬壁机器人,包括变形车身,其特征在于,所述变形车身包括一对分体(1),所述分体(1)内部设置有控制模块,所述控制模块电性连接有安装于分体(1)前后侧壁的激光测距仪,所述分体(1)上端安装有电性连接于控制模块的摄像头,所述分体(1)之间通过一对双向伸缩组件(4)相互连接,所述双向伸缩组件(4)包括中间的固定柱,所述固定柱左右两端均设置有电动伸缩杆(41),所述电动伸缩杆(41)远离固定柱一端与分体(1)固定连接,所述分体(1)内部安装有一对伺服电机,所述伺服电机输出端贯穿分体(1)外壁并固定连接有行进轮(3),所述行进轮(3)外壁啮合连接有磁吸履带(2)。
2.根据权利要求1所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述分体(1)下端安装有支撑轮(5),所述支撑轮(5)包括液压杆(51),所述液压杆(51)下端通过电动转轴转动连接有万向轮(52),所述支撑轮(5)电性连接于控制模块。
3.根据权利要求2所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述万向轮(52)的方向在机器人行进时与其前进方向一致。
4.根据权利要求1所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述分体(1)相对侧壁开设有活动槽,所述活动槽内部活动安装有装载板(6),所述装载板(6)与活动槽紧密连接,所述装载板(6)上开设有多个预装孔。
5.根据权利要求1所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述磁吸履带(2)包括内外层布置的内履带(21)和外履带(22),所述内履带(21)与外履带(22)之间通过卡扣固定连接,所述外履带(22)外壁嵌设多个电磁板(23),多个所述电磁板(23)分别被控制模块控制。
6.根据权利要求5所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述外履带(22)外壁开设有多道防滑槽,所述外履带(22)采用橡胶材料制成。
7.根据权利要求1所述的一种具备自主行驶与避障的磁吸附爬壁机器人,其特征在于,所述行进轮(3)外侧壁开设有多个环形减重槽。
技术总结
本发明提供了应用于机器人领域的一种具备自主行驶与避障的磁吸附爬壁机器人,包括变形车身,变形车身包括一对分体,分体上端安装有电性连接于控制模块的摄像头,分体之间通过一对双向伸缩组件相互连接,双向伸缩组件包括中间的固定柱,固定柱左右两端均设置有电动伸缩杆,行进轮外壁啮合连接有磁吸履带,通过一对双向伸缩组件使得分体向中间收缩,从而改变机器人的形态使其适应前方的路障,可以不改变路线轻松的通过狭窄地段,节约了绕行的时间,提高了机器人的工作效率,利用摄像头和激光测距仪对前方的道路进行识别和分析,判断出最佳通过路径以及通过方式,减少工作人员繁琐的操作。
技术研发人员:王珍,王均春,李嘉翊,张寅,张宇
受保护的技术使用者:安徽相品智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!