一种EPS系统换向凸点消除方法与流程
本发明属于机动车,ipc分类归属于b62d小类,尤其是涉及一种eps系统换向凸点消除方法。
背景技术:
1、作为电动汽车整车系统中必不可少的组成部分,转向系统是影响汽车操纵稳定性、行驶安全性、驾驶舒适性的关键部件,电动助力转向系统(electric power steering,eps)的发展改善了汽车转向力的控制特性,降低了驾驶人员的负担。随着汽车性能的要求越来越高,对eps系统的性能提出了更高的要求。经研究发现,由于驾驶员操作方向盘在方向盘中位连续来回小角度换向时,轮胎受到的阻力在不同角度不均匀,导致换向过程中eps系统的负载不均匀,从中间位置启动瞬间负载力较大,需要eps提供较大的力才能转动,当轮胎转动起来后,负载力突然变小,由于电机出力较大,此时手上突然感觉很轻,随后负载又恢复正常,手感又变重,整个过程感觉存在一个凸点,如附图1所示。凸点问题会影响驾驶员的驾驶手感,使人感觉到左右切换方向时手力变化不顺畅,因此,需要在eps系统的设计和标定过程中将此问题解决。
2、目前常用的凸点问题解决方法是减小电机闭环控制过程的pi参数,虽然此方法能减弱凸点手感,但由于降低了电机控制的响应速度,使得eps在快速转向时存在粘滞感。
技术实现思路
1、本发明针对eps存在的换向凸点问题,对换向过程的手力数据进行解析,识别驾驶员的控制意图,对助力电机进行电压补偿,并配合超前控制过程,对手力信号进行数字微分处理,加快控制的响应速度,更好的消除凸点问题。具体为:
2、本发明通过手力数据识别出驾驶员在方向盘中间位置开始的换向动作,启动电压补偿过程,加大eps出力,抵消从中间位置启动瞬间的大负载,使得启动瞬间的手力跟轮胎转动起来后的手力衔接,并配合超前控制过程,消除凸点问题。
3、所述电压补偿过程包括:
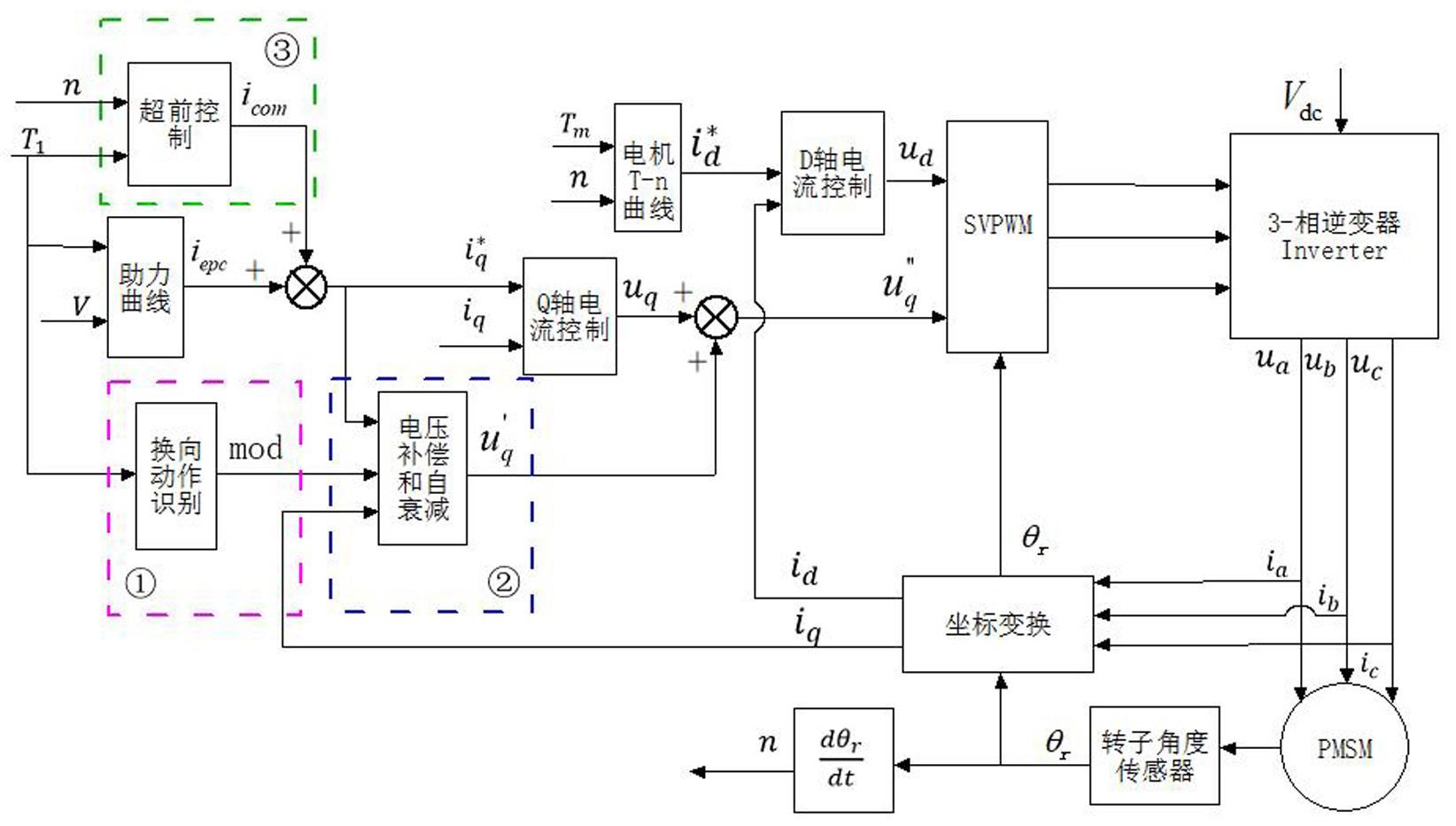
4、经换向动作识别方法识别出驾驶员换向动作,当mod=1或mod=-1时,需要对转向电机进行电压补偿。补偿原理如式1和式2所示,由q轴目标电流、q轴实际电流进行电流闭环调节,得到调节出的电压即q轴补偿电压,将叠加到转向电机q轴电流控制模块的输出电压上,得到合成后的电机电压,以加快电机电流响应速度,使eps提供较大的力。其中:
5、式1,式中为比例系数,为积分系数,t为时间变量;
6、式2,式中为图2中转向电机q轴电流控制模块的输出电压,为q轴补偿电压,为合成后的电机电压。
7、当电机的实际电流达到预设值(此预设值通过实车标定时确定,调制该值直到手上没有凸点的感觉为止)时,开始退出电压补偿,停止pi调节过程,并按公式3对补偿电压进行周期性(比如:周期为200us)的自衰减,直至为0;
8、式3,式中t为周期,为衰减系数,为当前的补偿电压, 为上一个周期的补偿电压。
9、由于驾驶员操作方向盘的手力变化反应到eps的传感器上存在几十毫秒的延时,使得控制过程滞后,因此本发明还配合有超前控制过程,对ecu采集到的驾驶员手力值进行数字微分处理,以预判手力变化值,根据式4计算超前电流补偿值,叠加到助力曲线的输出上,得到q轴目标电流,进行相位超前控制,提高动态响应快速性。
10、式4,式中为超前电流补偿值,为ecu采集到的驾驶员手力值,为数字微分系数,由式5确定:
11、式5
12、式5中,n为电机转速,、、、分别为数字微分系数上限、数字微分系数下限、数字微分电机转速上限、数字微分电机转速下限,均通过实车标定确定。
13、解决凸点问题需要电压补偿和超前控制相配合使用,电压补偿的方法是识别出凸点后通过电压补偿区减弱凸点问题,超前控制的方法是预测手力,进行相位超前控制,以解决因为机械上的传动滞后造成的扭矩传感器检测到的手力值滞后,造成的整个系统控制上的滞后的问题。
14、经研究发现,驾驶员在中位左右换向时,手力值会经过由零变正的过程,或者由零变负的过程。因此,通过解析手力的过程数据,统计手力值持续为0的时间、持续大于正阈值或持续小于负阈值的时间,以及由零变为正或由零变为负的顺序,识别出驾驶员换向动作。
15、本发明提出了一种换向动作识别的具体方法:取第一手力阈值为手力在0附近的边界,手力值在±第一手力阈值范围内时认为手力为0,取一正的第二手力阈值为手力为正的边界,手力值大于正的第二手力阈值时认为手力为正,取负的第二手力阈值为手力为负的边界,手力值小于负的第二手力阈值时认为手力为负;所述第二手力阈值大于第一手力阈值;
16、指定一时间周期,以该时间周期为周期对手力值进行判断,先周期性统计手力值在±第一手力阈值以内的次数,若超过第一指定次数,则判定手力为0,mod=0;
17、当手力值为大于正的第二手力阈值且持续的次数大于第一指定次数,则判定为向右的换向动作,mod=1,此时启动电压补偿过程并配合超前控制过程,同时将手力为0 的次数和手力为正的次数清零;
18、当手力值为小于负的第二手力阈值且持续的次数大于第一指定次数,则判定为向左的换向动作,mod=-1,此时启动电压补偿过程超前控制过程,同时将手力为0 的次数和手力为负的次数清零;初始状态下,mod设置为0。
19、与原有的电动助力控制策略相比,本发明具有以下有益效果:引入方向盘手力数据和助力电机的电机转速,通过对手力解析,有效识别换向动作;增加电压补偿,加快电机电流响应速度,加大电机出力,消除凸点,消除驾驶员小角度换向向过程中的凸点,提升了eps的操纵性能;电机实际电流达到预期值时,对补偿值进行自衰减,稳定退出补偿;利用手力数字微分,进行相位超前控制,提高动态响应快速性。
技术特征:
1.一种eps系统换向凸点消除方法,其特征在于,通过手力数据识别出驾驶员在方向盘中间位置开始的换向动作,启动电压补偿过程,并配合超前控制过程;
2.根据权利要求1所述的一种eps系统换向凸点消除方法,其特征在于,按式3对补偿电压进行周期性的自衰减,
3.根据权利要求1所述的一种eps系统换向凸点消除方法,其特征在于,在超前控制过程中,定义一个数组,数组大小为大于等于10的整数,以大于等于200μs为周期进行一次计算,在每个周期,将数组中的后面的元素依次保存到前一个元素中,将最新的手力值t1存入数组的最后一个元素中;然后应用逐差法将数组第6个元素的值减去第1个元素的值得到δ1,并乘以权重w1;将第7个元素的值减去第2个元素的值得到δ2,并乘以权重w2;以此类推,得到δ3、δ4、δ5,再乘以权重并相加得到,按下式:
4.根据权利要求1所述的一种eps系统换向凸点消除方法,其特征在于,换向动作识别的方法为:取第一手力阈值为手力在0附近的边界,手力值在±第一手力阈值范围内时认为手力为0,取正的第二手力阈值为手力为正的边界,手力值大于正的第二手力阈值时认为手力为正,取负的第二手力阈值为手力为负的边界,手力值小于负的第二手力阈值时认为手力为负;所述第二手力阈值大于第一手力阈值;
技术总结
本发明提供了一种EPS系统换向凸点消除方法,通过手力数据识别出驾驶员在方向盘中间位置开始的换向动作,启动电压补偿过程,加大EPS出力,抵消从中间位置启动瞬间的大负载,使得启动瞬间的手力跟轮胎转动起来后的手力衔接,并配合超前控制过程,对ECU采集到的驾驶员手力值进行数字微分处理,以预判手力变化值,计算超前电流补偿值叠加到助力曲线的输出上,进行相位超前控制,提高动态响应快速性,消除凸点问题,提升了EPS的操纵性能。
技术研发人员:沈敬祖,李志杰,王豪
受保护的技术使用者:天津德星智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!