一种可旋转磁吸附轮组、爬行方法和爬壁机器人与流程
本发明涉及爬壁机器人,尤其是指一种可旋转磁吸附轮组和爬壁机器人。
背景技术:
1、爬壁机器人是可以在垂直墙壁上攀爬并完成作业的自动化机器人。爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此又称为极限作业机器人。爬壁机器人必须具备吸附和移动两个基本功能,而常见吸附方式有负压吸附和永磁吸附两种。其中负压方式可以通过吸盘内产生负压而吸附于壁面上,不受壁面材料的限制;永磁吸附方式则有永磁体和电磁铁两种方式,只适用于吸附导磁性壁面。爬壁机器人主要用于石化企业对圆柱形大罐进行探伤检查或喷漆处理,或进行建筑物的清洁和喷涂。在核工业中用来检查测厚等,还可以用于消防和造船等行业。
2、对于爬壁机器人,在实际使用过程中,存在以下技术缺陷:一方面,为了实现机器人在崎岖不平的壁面上做爬壁操作,需要实时对吸附单元的位置进行调整,此时,除了驱动轮体转动的驱动源外,还需要另外安装驱动源驱动吸附单元动作,其占用空间大,重量重,不利于机器人小型化和轻型化设计;另一方面,由于吸附单元的位置需要进行移动或转动,以此适应性地吸附在不同坡度的壁面上时,而能够转动或移动的吸附组件吸附在壁面上后,稳定性不佳,容易打滑,导致机器人爬壁失败。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中爬壁机器人的轮组体积大,稳定性差,爬壁效果不好的技术缺陷。
2、为解决上述技术问题,本发明提供了一种可旋转磁吸附轮组,包括:
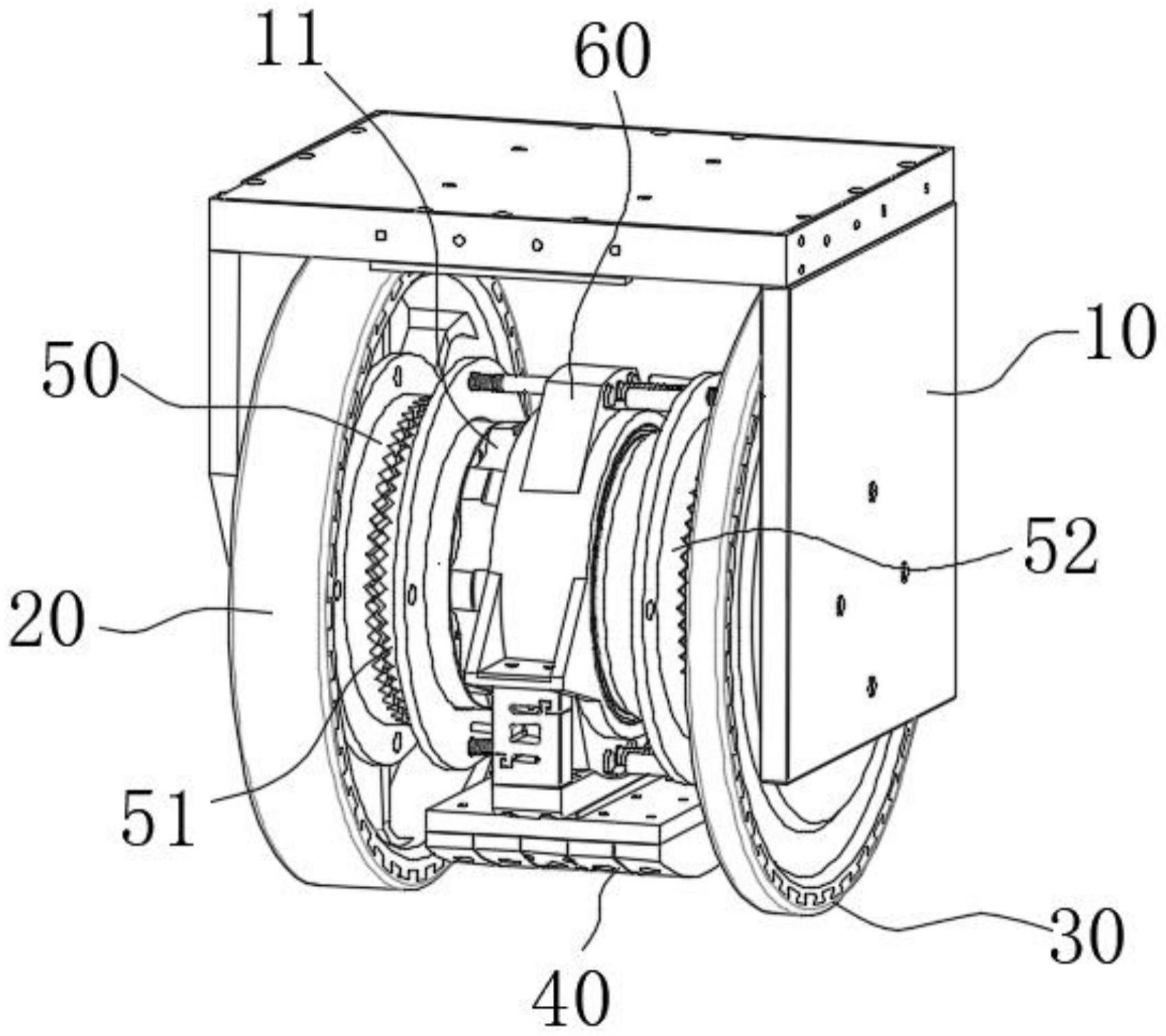
3、轮体组件,所述轮体组件包括驱动源、中心轴、主动轮和从动轮,所述驱动源驱动主动轮转动,所述主动轮和从动轮位于中心轴的两侧;
4、啮合组件,所述啮合组件包括依次设置的第一固定件、第一移动件、第二固定件和第二移动件,所述第一固定件与主动轮固定设置,所述第二固定件与中心轴固定设置,所述第一固定件和第一移动件上设置有能够啮合的齿轮,所述第二固定件和第二移动件上设置有能够啮合的齿轮;
5、吸附旋转组件,所述吸附旋转组件包括安装件和设置在安装件上的吸附单元,所述安装件分别与第一移动件和第二移动件连接;
6、调节组件,所述调节组件能够带动第一移动件和第二移动件同步移动;
7、当需要调整吸附单元的位置时,所述调节组件带动所述第一移动件移动并与第一固定件啮合,所述第二移动件与第二固定件分离,所述主动轮带动所述安装件同步转动以调整吸附单元的位置;
8、当不需要调整吸附单元的位置时,所述调节组件带动第二移动件移动并与第二固定件啮合,所述第一固定件与第一移动件分离。
9、作为优选的,所述调节组件包括杆体、电磁铁、定位件和弹性件,所述杆体穿设在所述安装件上,所述杆体的一端与第一移动件固定,所述杆体的另一端与第二移动件固定,所述弹性件套设在杆体上,所述弹性件的一端抵接第二移动件,所述弹性件的另一端抵接安装件;
10、所述电磁铁设置在安装件上,所述定位件设置在第二移动件上;
11、当电磁铁通电时,所述电磁铁产生磁性并吸附定位件以使得第二移动件与杆体沿第一方向移动,所述第二移动件移动并与第二固定件分离,所述杆体移动以使得第一移动件与第一固定件啮合;
12、当电磁铁断电时,所述电磁铁的磁性消失,所述弹性件产生的弹力以推动第二移动件和杆体沿第二方向移动,所述第二移动件移动并与第二固定件啮合,所述杆体移动以使得第一移动件与第一固定件分离;
13、其中,所述第二方向与第一方向相反。
14、作为优选的,所述弹性件为弹簧。
15、作为优选的,所述调节组件具有多个,多个所述调节组件绕所述安装件的周向均匀设置。
16、作为优选的,所述安装件为环形,所述环形的安装件环绕所述中心轴设置。
17、作为优选的,所述安装件与所述中心轴之间设置有转动轴承。
18、作为优选的,所述吸附单元为负压吸附单元或磁吸附单元。
19、作为优选的,所述吸附单元与安装座之间设置有力传感器。
20、本发明公开了一种可旋转磁吸附轮组的爬行方法,基于上述的可旋转磁吸附轮组,包括以下步骤:
21、获取待爬壁面位置;
22、所述调节组件工作,使得第一移动件与第一固定件啮合,所述主动轮转动以带动吸附单元转动并朝向待爬壁面;
23、所述调整组件工作,使得所述第一移动件与第一固定件脱离,所述吸附单元停止转动,所述主动轮继续带动可旋转磁吸附轮组动作。
24、本发明公开了一种爬壁机器人,基于上述的可旋转磁吸附轮组,包括前行走模块和后行走模块,所述前行走模块与后行走模块连接,所述前行走模块包括可旋转磁吸附轮组,所述后行走模块包括可旋转磁吸附轮组。
25、本发明的上述技术方案相比现有技术具有以下优点:
26、1、本发明,驱动源驱动主动轮转动,通过主动轮和从动轮配合,即可实现可旋转磁吸附轮组前进;在可旋转磁吸附轮组前进时,当需要调整吸附单元的位置时,调节组件工作,使得第一移动件与第一固定件啮合,第二移动件与第二固定件分离,由于第一固定件与主动轮固定,如此,当主动轮转动时,即可带动吸附单元绕轮组的中心线转动;当吸附组件转动至目标位置后,调节组件工作,第一移动件与第一固定件分离,第二移动件与第二固定件啮合,安装件不会发生旋转,如此,吸附模块的位置也固定。
27、2、本发明通过主动轮带动安装件和安装件上的吸附单元同步动作,不需要另外安装驱动源,结构紧凑,有利于机器人小型化和轻型化发展。并且,由于第一固定件和第一移动件啮合,第一固定件与主动轮固定,可以保证安装件和吸附单元能够稳定动作;而第二固定件和第二移动件啮合,可以保证安装件与吸附单元稳定固定。
28、3、本发明中的爬壁机器人,稳定性好,方便吸附单元的位置调整,爬壁效果好,结构紧凑。
技术特征:
1.一种可旋转磁吸附轮组,其特征在于,包括:
2.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述调节组件包括杆体、电磁铁、定位件和弹性件,所述杆体穿设在所述安装件上,所述杆体的一端与第一移动件固定,所述杆体的另一端与第二移动件固定,所述弹性件套设在杆体上,所述弹性件的一端抵接第二移动件,所述弹性件的另一端抵接安装件;
3.根据权利要求2所述的可旋转磁吸附轮组,其特征在于,所述弹性件为弹簧。
4.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述调节组件具有多个,多个所述调节组件绕所述安装件的周向均匀设置。
5.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述安装件为环形,所述环形的安装件环绕所述中心轴设置。
6.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述安装件与所述中心轴之间设置有转动轴承。
7.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述吸附单元为负压吸附单元或磁吸附单元。
8.根据权利要求1所述的可旋转磁吸附轮组,其特征在于,所述吸附单元与安装座之间设置有力传感器。
9.一种可旋转磁吸附轮组的爬行方法,基于权利要求1-8任一项所述的可旋转磁吸附轮组,其特征在于,包括以下步骤:
10.一种爬壁机器人,基于权利要求1-8任一项所述的可旋转磁吸附轮组,其特征在于,包括前行走模块和后行走模块,所述前行走模块与后行走模块连接,所述前行走模块包括可旋转磁吸附轮组,所述后行走模块包括可旋转磁吸附轮组。
技术总结
本发明涉及一种可旋转磁吸附轮组和爬壁机器人,轮体组件包括驱动源、中心轴、主动轮和从动轮,驱动源驱动主动轮转动,主动轮和从动轮位于中心轴的两侧;啮合组件,啮合组件包括依次设置的第一固定件、第一移动件、第二固定件和第二移动件,第一固定件与主动轮固定设置,第二固定件与中心轴固定设置,第一固定件和第一移动件上设置有能够啮合的齿轮,第二固定件和第二移动件上设置有能够啮合的齿轮;吸附旋转组件,吸附旋转组件包括安装件和设置在安装件上的吸附单元,安装件分别与第一移动件和第二移动件连接;调节组件,所述调节组件能够带动第一移动件和第二移动件同步移动。其稳定性好,方便吸附单元的位置调整,爬壁效果好,结构紧凑。
技术研发人员:周义华,王宝玉,李建伟,孙正茂
受保护的技术使用者:江苏镌极特种设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!