一种胸腔主体结构及机器人的制作方法
本申请属于机器人,更具体地说,是涉及一种胸腔主体结构及机器人。
背景技术:
1、随着越来越多的服务机器人走入大众视野,服务普通家庭,机器人越来越受欢迎。如人形机器人、足式机器人或轮足式机器人都已开始向普通消费者转型研发,在满足机器人服务功能的前提下,对机器人小型化的要求越来越高。
2、而在小型化的研发道路上,会使机器人内部空间逼仄,在逼仄的空间内如何合理布局机器人所需关键元器件是一件必须要解决的问题,由于机器人所需要的关键器件很多,业界未给出一种合理的布局方案,从而导致机器人小型化不够。
技术实现思路
1、本申请实施例的目的在于提供一种胸腔主体结构及机器人,以解决机器人所需要的关键元器件在机器人内部布局不合理而影响小型化发展的技术问题。
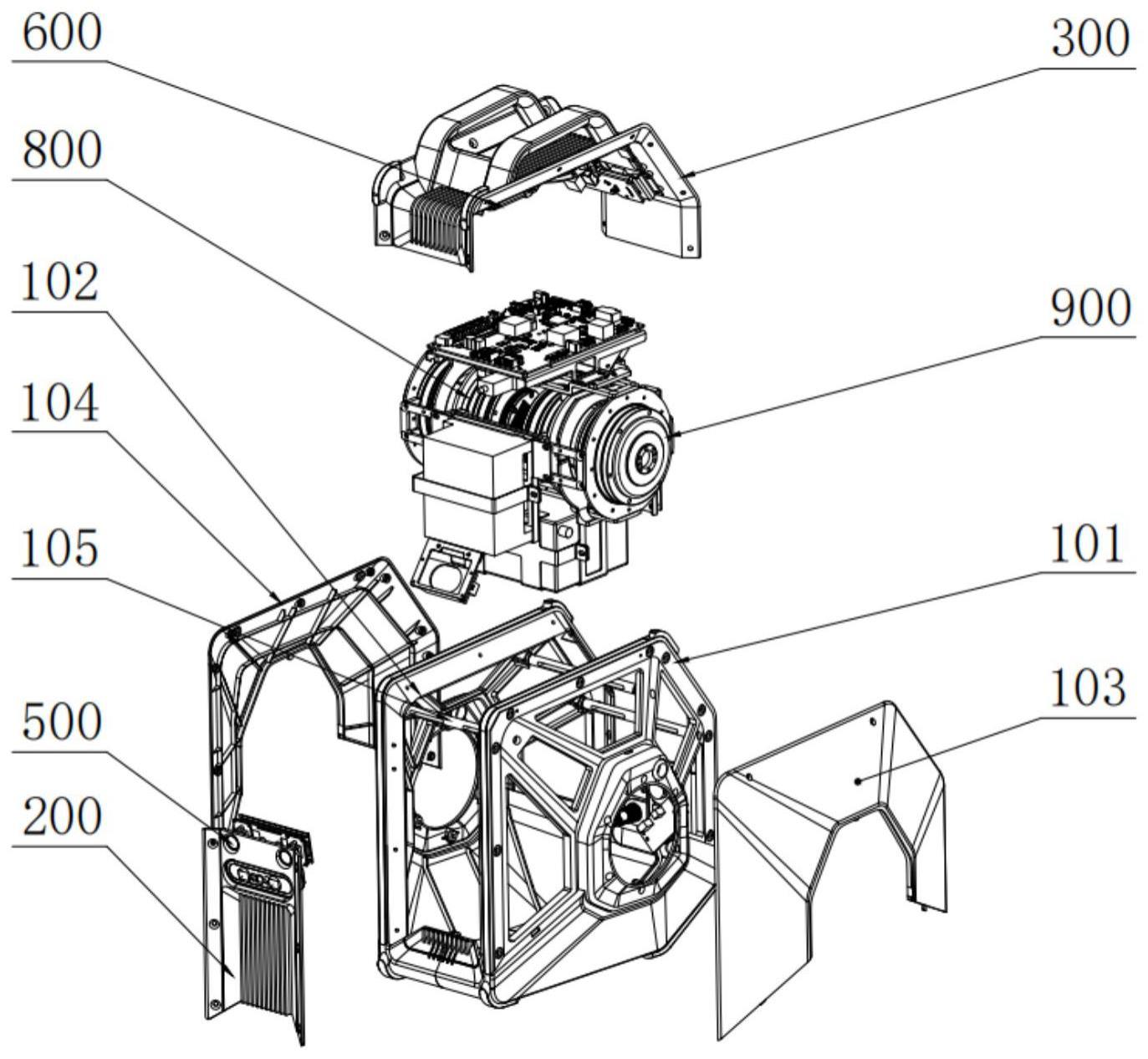
2、为实现上述目的,本申请采用的技术方案是:提供一种胸腔主体结构,包括胸腔外壳组件、位于所述胸腔外壳组件内的驱动组件及将所述驱动组件横跨安装于所述胸腔外壳组件的相对两侧之间的安装组件;所述驱动组件包括串联在一起的第一转动驱动件和第二转动驱动件,第一转动驱动件的转动部与所述第二转动驱动件的固定部固定连接;所述安装组件包括连接支架、安装于所述连接支架上的两个第一安装件和第二安装件,两个第一安装件分别固定连接于
3、胸腔外壳组件的相对两侧,所述第一转动驱动件的固定部与所述第二安装件固定连接,所述第二转动驱动件的转动部穿过其中一个第一安装件,所述连接支架通过第一安装件横跨安装于所述胸腔外壳组件的相对两侧之间。
4、可选地,所述第一转动驱动件的转动部与所述第二转动驱动件的固定部之间通过一个连接件固定连接;所述连接件包括安装于所述第一转动驱动件的转动部上的第一安装部及由所述第一安装部的外周缘朝向所述第二转动驱动件的固定部延伸并包裹于所述第二转动驱动件的固定部的一端的第二安装部,所述第二转动驱动件的转动部的一端伸入所述第二安装部内。
5、可选地,所述驱动组件为两个,两个所述驱动组件在一条轴线上排布,两个所述驱动组件中的第一转动驱动件相靠近,两个所述驱动组件的第二转动驱动件相背离,两个所述第二转动驱动件的转动部分别穿过两个所述第一安装件;所述第二安装件为两个,两个所述第一转动驱动件的固定部分别与两个所述第二安装件固定连接。
6、可选地,所述连接支架为长条框架结构,所述连接支架的相对两端分别与两个所述第一安装件固定连接,两个所述第二安装件位于两个所述第一安装件之间。
7、可选地,所述连接支架于所述第一安装件与其相邻的所述第二安装件之间开设有一个减重口,所述连接支架于两个所述第二安装件之间开设有两个减重口。
8、可选地,所述连接支架包括连接于两个第二安装件之间的第一部分和连接于第一安装件和第二安装件之间的第二部分,所述第一部分相对于所述第二部分更靠近所述驱动组件的转动轴线。
9、可选地,所述连接支架设有多个,多个所述连接支架围设于所述驱动组件的外周。
10、可选地,所述第二安装件和所述连接件之间设有挡线件,所述挡线件与所述连接支架连接。
11、可选地,所述连接件上具有凸出结构;所述第一安装件上设有两个限位件,所述连接件正转和反转时,所述凸出结构能够分别抵接于两个限位件。
12、可选地,所述第一安装件上设有第一标零孔,所述凸出结构上设有第二标零孔,在标零状态下,所述第一标零孔的轴线和所述第二标零孔的轴线在同一条直线上。
13、本申请还提供了一种机器人,包括腿型结构和上述的胸腔主体结构,所述腿型结构与所述胸腔主体结构活动连接。
14、可选地,所述腿型结构包括腿部和轮部;所述腿部一端与所述第二转动驱动件连接,所述腿部的另一端与所述轮部活动连接。
15、本申请提供的胸腔主体结构及机器人的的有益效果在于:与现有技术相比,本申请中,连接支架通过第一安装件横跨安装于胸腔外壳组件的相对两侧之间,驱动组件的第一转动驱动件的固定部通过第二安装件与连接支架相连接,第一转动驱动件的固定部分通过第二安装件、连接支架与胸腔外壳组件形成相对固定连接,因为第二转动驱动件与第一转动驱动件是串联在一起的,所以第二转动驱动件与胸腔外壳组件的位置也是相对固定的,如此,本申请是通过安装组件实现驱动组件横跨安装于胸腔外壳组件内,驱动组件悬空于胸腔外壳组件内,不需要额外设置支撑驱动组件的座体,也不需要额外在第一转动驱动件和第二转动驱动件之间设置轴承,同时,驱动组件悬空于胸腔外壳组件内,形成胸腔主体结构的核心重量,其他在胸腔外壳组件内需要设置的零部件可以在这个核心周围设置,使结构布局合理,有效地通过布局设计实现小型化。
技术特征:
1.一种胸腔主体结构,其特征在于,所述胸腔主体结构包括胸腔外壳组件、位于所述胸腔外壳组件内的驱动组件及将所述驱动组件横跨安装于所述胸腔外壳组件的相对两侧之间的安装组件;所述驱动组件包括串联在一起的第一转动驱动件和第二转动驱动件,第一转动驱动件的转动部与所述第二转动驱动件的固定部固定连接;所述安装组件包括连接支架、安装于所述连接支架上的两个第一安装件和第二安装件,两个第一安装件分别固定连接于胸腔外壳组件的相对两侧,所述第一转动驱动件的固定部与所述第二安装件固定连接,所述第二转动驱动件的转动部穿过其中一个第一安装件,所述连接支架通过第一安装件横跨安装于所述胸腔外壳组件的相对两侧之间。
2.如权利要求1所述的胸腔主体结构,其特征在于,所述第一转动驱动件的转动部与所述第二转动驱动件的固定部之间通过一个连接件固定连接;所述连接件包括安装于所述第一转动驱动件的转动部上的第一安装部及由所述第一安装部的外周缘朝向所述第二转动驱动件的固定部延伸并包裹于所述第二转动驱动件的固定部的一端的第二安装部,所述第二转动驱动件的转动部的一端伸入所述第二安装部内。
3.如权利要求1所述的胸腔主体结构,其特征在于,所述驱动组件为两个,两个所述驱动组件在一条轴线上排布,两个所述驱动组件中的第一转动驱动件相靠近,两个所述驱动组件的第二转动驱动件相背离,两个所述第二转动驱动件的转动部分别穿过两个所述第一安装件;所述第二安装件为两个,两个所述第一转动驱动件的固定部分别与两个所述第二安装件固定连接。
4.如权利要求3所述的胸腔主体结构,其特征在于,所述连接支架为长条框架结构,所述连接支架的相对两端分别与两个所述第一安装件固定连接,两个所述第二安装件位于两个所述第一安装件之间。
5.如权利要求4所述的胸腔主体结构,其特征在于,所述连接支架于所述第一安装件与其相邻的所述第二安装件之间开设有一个减重口,所述连接支架于两个所述第二安装件之间开设有两个减重口。
6.如权利要求1所述的胸腔主体结构,其特征在于,所述连接支架包括连接于两个第二安装件之间的第一部分和连接于第一安装件和第二安装件之间的第二部分,所述第一部分相对于所述第二部分更靠近所述驱动组件的转动轴线。
7.如权利要求1-6任意一项所述的胸腔主体结构,其特征在于,所述连接支架设有多个,多个所述连接支架围设于所述驱动组件的外周。
8.如权利要求2所述的胸腔主体结构,其特征在于,所述第二安装件和所述连接件之间设有挡线件,所述挡线件与所述连接支架连接。
9.如权利要求2所述的胸腔主体结构,其特征在于,所述连接件上具有凸出结构;所述第一安装件上设有两个限位件,所述连接件正转和反转时,所述凸出结构能够分别抵接于两个限位件。
10.如权利要求9所述的胸腔主体结构,其特征在于,所述第一安装件上设有第一标零孔,所述凸出结构上设有第二标零孔,在标零状态下,所述第一标零孔的轴线和所述第二标零孔的轴线在同一条直线上。
11.一种机器人,其特征在于,包括:
12.如权利要求11所述的机器人,其特征在于,所述腿型结构包括腿部和轮部;所述腿部一端与所述第二转动驱动件连接,所述腿部的另一端与所述轮部活动连接。
技术总结
本申请提供了一种胸腔主体结构及机器人,胸腔主体结构包括胸腔外壳组件、位于胸腔外壳组件内的驱动组件及将驱动组件横跨安装于胸腔外壳组件的相对两侧之间的安装组件;驱动组件包括串联在一起的第一转动驱动件和第二转动驱动件;安装组件包括连接支架、安装于连接支架上的两个第一安装件和第二安装件,连接支架通过第一安装件横跨安装于胸腔外壳组件的相对两侧之间。机器人包括腿型结构和上述的胸腔主体结构,腿型结构与胸腔主体结构活动连接。本申请中,驱动组件悬空于胸腔外壳组件内,形成胸腔主体结构的核心重量,其他在胸腔外壳组件内需要设置的零部件可以在这个核心周围设置,使结构布局合理,有效地通过布局设计实现小型化。
技术研发人员:刘阳,王浩,陈春玉,陆丽华
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!