智能调节式工业箱体脚轮系统的制作方法
本发明涉及脚轮系统领域,尤其是智能调节式工业箱体脚轮系统。
背景技术:
1、工业箱体是用于工业场所、工程项目或其他具有特定需求的箱体,这些箱体通常具有坚固耐用的特点,能够承受重物、抵御恶劣环境条件和保护其内部物品免受损坏。
2、然而,工业箱体的运转需要多方面的考虑,目前越来越多物流公司采用搬运车来替代人工搬运,但现有的搬运车的脚轮系统调节效果不佳,无法达到智能和全自动化,尤其对于重量大的箱体而言,不仅对搬运车的负担过大,还需通过人工操作搬运系统,因此费时费力,且易导致搬运不稳当,因此不适用于大部分的工业箱体的搬运。
技术实现思路
1、本发明为了解决上述存在的技术问题,提供智能调节式工业箱体脚轮系统。
2、本发明的技术方案是这样实现的:
3、智能调节式工业箱体脚轮系统,包括箱体机构、脚轮机构和控制系统;
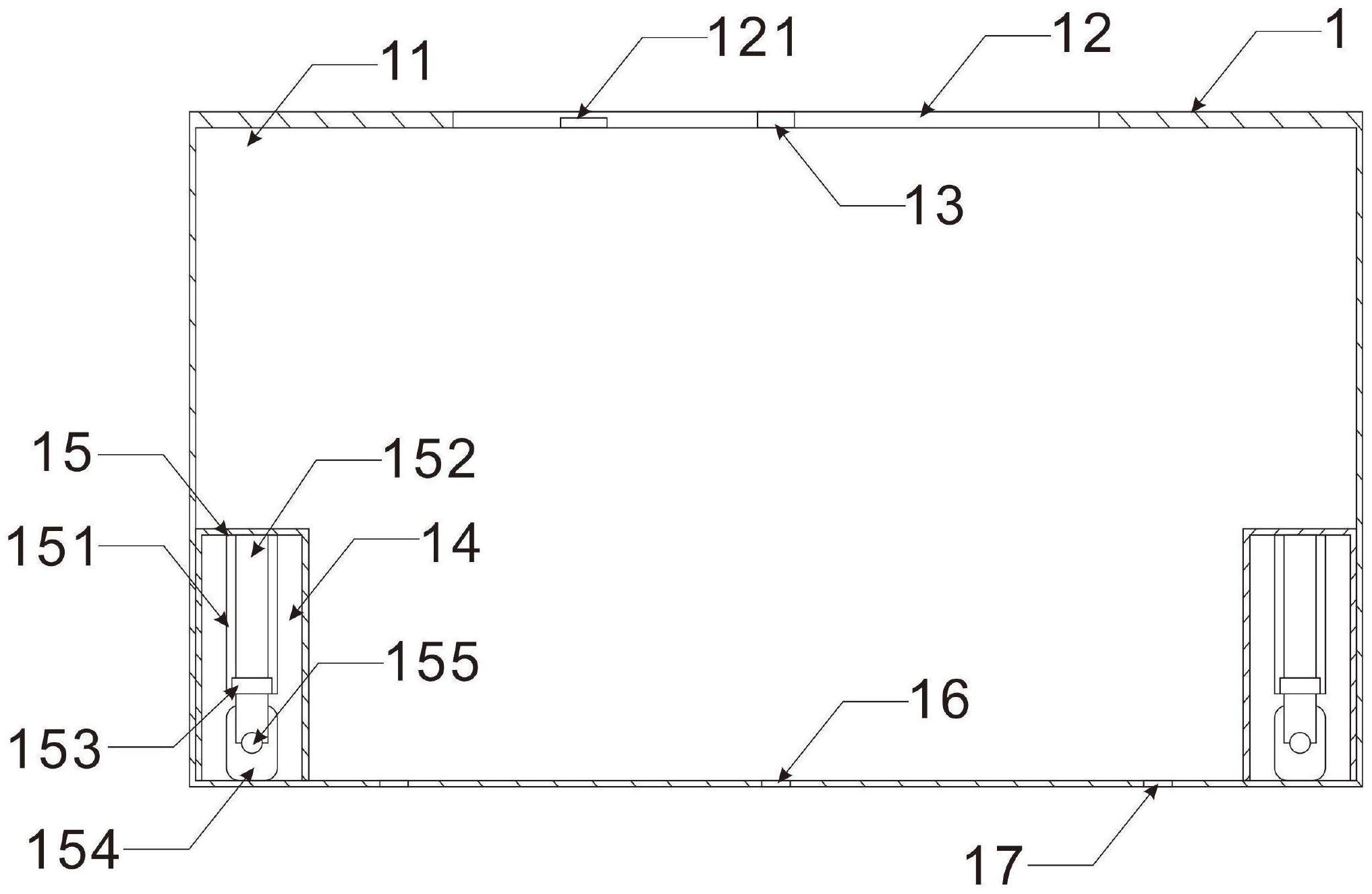
4、所述箱体机构包括箱体,所述箱体顶部内嵌有箱体控制器,所述箱体控制器内部安装有陀螺仪一,所述箱体底部四角均开设有收纳槽,所述收纳槽内顶部安装有伸缩组件,所述箱体底部中心内嵌有距离传感器一,所述箱体正面底部靠近两组所述伸缩组件一端均内嵌有距离传感器二,所述箱体控制器与所述陀螺仪一、伸缩组件、距离传感器一和距离传感器二均电连接,所述箱体采用导磁材料;
5、所述脚轮机构包括车体,所述车体顶部内部安装有若干电永磁铁单元,所述车体顶部四角内部均安装有距离传感器三,所述车体内部两侧壁分别安装有两组旋转电机,所述旋转电机侧边连接输出轴一端,所述输出轴另一端贯穿车体内壁并连接主动轮,所述车体内部底部安装有车体控制器,所述车体控制器内部安装有陀螺仪二,所述车体控制器与电永磁铁单元、距离传感器三、旋转电机和陀螺仪二均电连接,所述车体控制器与所述箱体控制器无线通信连接;
6、所述控制系统包括感应模块、cpu模块、运行模块,所述感应模块的输出端与所述cpu模块的输入端通讯连接,所述cpu模块的输出端与所述运行模块的输入端通讯连接;
7、所述感应模块用于利用距离传感器一、距离传感器二、距离传感器三、陀螺仪一、陀螺仪二获取车体和箱体之间的感应数据;
8、所述cpu模块用于利用所述箱体控制器和车体控制器接收所述感应模块所输出数据,并对其进行数据分析处理后,对所述运行模块输出运行指令;
9、所述运行模块用于根据所述cpu模块输出指令控制伸缩组件、电永磁铁单元、旋转电机运行,从而控制车体与箱体的运行。
10、作为优选,所述伸缩组件包括轮腿,所述轮腿与所述收纳槽内顶部固定连接,所述轮腿内部安装有伸缩杆,所述伸缩杆底部安装有伸缩电机,所述伸缩电机驱动伸缩杆,所述轮腿底部连接有从动轮,所述从动轮侧边安装有抱闸,所述伸缩电机和抱闸均与所述箱体控制器电连接。
11、作为优选,所述主动轮采用agv轮或麦克纳姆轮,用于驱使所述车体全向移动。
12、作为优选,所述车体两侧顶部安装有激光雷达,所述激光雷达与所述车体控制器电连接,所述激光雷达用于利用三维点云获取周围环境特征实现车体的避障。
13、作为优选,所述箱体控制器内部安装有rtk模块一,并与之电连接,用于实现所述箱体的定位,所述车体控制器内部安装有rtk模块二,并与之电连接,用于实现所述车体的定位。
14、作为优选,所述车体长度小于两组所述距离传感器二之间的距离,所述车体宽度小于或等于所述箱体宽度。
15、作为优选,所述感应模块包括测距单元、调节单元;
16、所述测距单元用于根据距离传感器一、距离传感器二、距离传感器三获取所述箱体与车体之间的距离数据;
17、所述调节单元用于根据陀螺仪一和陀螺仪二获取所述箱体与车体之间的角度数据。
18、作为优选,所述感应模块还包括定位单元,所述定位单元用于根据rtk模块一和rtk模块二获取所述箱体与车体之间的位置数据。
19、作为优选,所述cpu模块包括箱体控制单元、车体控制单元,所述箱体控制单元与所述车体控制单元双向通讯连接,用于数据信号交互;
20、所述箱体控制单元用于根据所述箱体控制器所接收的所述感应模块所传输数据,进行分析处理,得出所述箱体的运行指令,输出指令至所述运行模块;
21、所述车体控制单元用于根据所述车体控制器所接收的所述感应模块所传输数据,进行分析处理,得出所述车体的运行指令,输出指令至所述运行模块。
22、作为优选,所述运行模块包括伸缩单元、移动单元、磁吸单元;
23、所述伸缩单元用于根据所述cpu模块所输出指令,控制所述伸缩电机运行,从而控制所述箱体进行高度调节;
24、所述移动单元用于根据所述cpu模块所输出指令,控制所述旋转电机运行,从而控制所述车体进行位置调节;
25、所述磁吸单元用于根据所述cpu模块所输出指令,控制所述电永磁铁单元运行,从而控制所述箱体与车体进行连接。
26、与现有技术相比,本发明的有益效果是:
27、本发明通过距离传感器和陀螺仪,获取箱体与车体之间的相对位置,通过箱体控制器和车体控制器,控制电机与电永磁铁运行,从而使得箱体与车体稳固中心连接,从而避免搬运不稳当,通过控制系统控制箱体机构和脚轮机构,提高对脚轮系统的控制调节效果,达到智能和全自动化的目的,即使对于重量大的箱体而言,也能通过控制系统对箱体机构和脚轮机构的自动化调节与控制,实现省时省力的搬运工作,适用于大部分的工业箱体的搬运。
技术特征:
1.智能调节式工业箱体脚轮系统,其特征在于:包括箱体机构(1)、脚轮机构(2)和控制系统;
2.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述伸缩组件(15)包括轮腿(151),所述轮腿(151)与所述收纳槽(14)内顶部固定连接,所述轮腿(151)内部安装有伸缩杆(152),所述伸缩杆(152)底部安装有伸缩电机(153),所述伸缩电机(153)驱动伸缩杆(152),所述轮腿(151)底部连接有从动轮(154),所述从动轮(154)侧边安装有抱闸(155),所述伸缩电机(153)和抱闸(155)均与所述箱体控制器(12)电连接。
3.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述主动轮(26)采用agv轮或麦克纳姆轮,用于驱使所述车体(21)全向移动。
4.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述车体(21)两侧顶部安装有激光雷达(211),所述激光雷达(211)与所述车体控制器(27)电连接,所述激光雷达(211)用于利用三维点云获取周围环境特征实现车体(21)的避障。
5.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述箱体控制器(12)内部安装有rtk模块一(121),并与之电连接,用于实现所述箱体(11)的定位,所述车体控制器(27)内部安装有rtk模块二(271),并与之电连接,用于实现所述车体(21)的定位。
6.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述车体(21)长度小于两组所述距离传感器二(17)之间的距离,所述车体(21)宽度小于或等于所述箱体(11)宽度。
7.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述感应模块包括测距单元、调节单元;
8.根据权利要求1或5所述的智能调节式工业箱体脚轮系统,其特征在于:所述感应模块还包括定位单元,所述定位单元用于根据rtk模块一(121)和rtk模块二(271)获取所述箱体(11)与车体(21)之间的位置数据。
9.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述cpu模块包括箱体控制单元、车体控制单元,所述箱体控制单元与所述车体控制单元双向通讯连接,用于数据信号交互;
10.根据权利要求1所述的智能调节式工业箱体脚轮系统,其特征在于:所述运行模块包括伸缩单元、移动单元、磁吸单元;
技术总结
本发明公开了智能调节式工业箱体脚轮系统,包括箱体机构、脚轮机构和控制系统,所述箱体机构包括伸缩组件等,所述脚轮机构包括电永磁铁单元等,所述控制系统包括感应模块、CPU模块、运行模块,本发明通过距离传感器和陀螺仪,获取箱体与车体之间的相对位置,通过箱体控制器和车体控制器,控制电机与电永磁铁运行,从而使得箱体与车体稳固中心连接,从而避免搬运不稳当,通过控制系统控制箱体机构和脚轮机构,提高对脚轮系统的控制调节效果,达到智能和全自动化的目的,即使对于重量大的箱体而言,也能通过控制系统对箱体机构和脚轮机构的自动化调节与控制,实现省时省力的搬运工作,适用于大部分的工业箱体的搬运。
技术研发人员:方必坤,方碧应,方瑛琦
受保护的技术使用者:广东尚坤工业科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!