一种复合式吸附与足履式移动的叶片检测机器人
本发明涉及风电检测,尤其涉及一种复合式吸附与足履式移动的叶片检测机器人。
背景技术:
1、随着我国“双碳”目标的日益推进,风电装备产业得到飞速发展,风电叶片作为风力发电机组的关键部件之一,由于长期受负荷运行,极易发生故障,若不能及时检查和维修,不仅会造成经济损失,还会引发其他部件的故障。因此,对风电叶片的精准检测和有效维修显得至关重要。传统的缺陷检测方法大多采用人工检查,该方法在检测时耗时耗力、潜在风险高、检测效率较低。所以,我们迫切需要一种更高效、更安全、更准确的缺陷检测方法。目前大多数检测机器人只能在单一类型的壁面上攀爬,未能很好地解决在不同壁面的稳定性和适应性问题。例如202010765150.7的中国发明专利公开了一种风电叶片检测机器人,其采用环抱式检测结构,检测时需借助吊装设备将其安装在风力发电机叶片上,且一次检测完之后需重新选定停机的叶片检测,无法对运转中的叶片进行检测。
2、因此针对上述现象,设计了一种适应性强、稳定吸附、检测效率高的检测机器人,以满足实际使用的需要。
技术实现思路
1、本发明提供一种复合式吸附与足履式移动的叶片检测机器人,解决了背景技术中的技术问题。
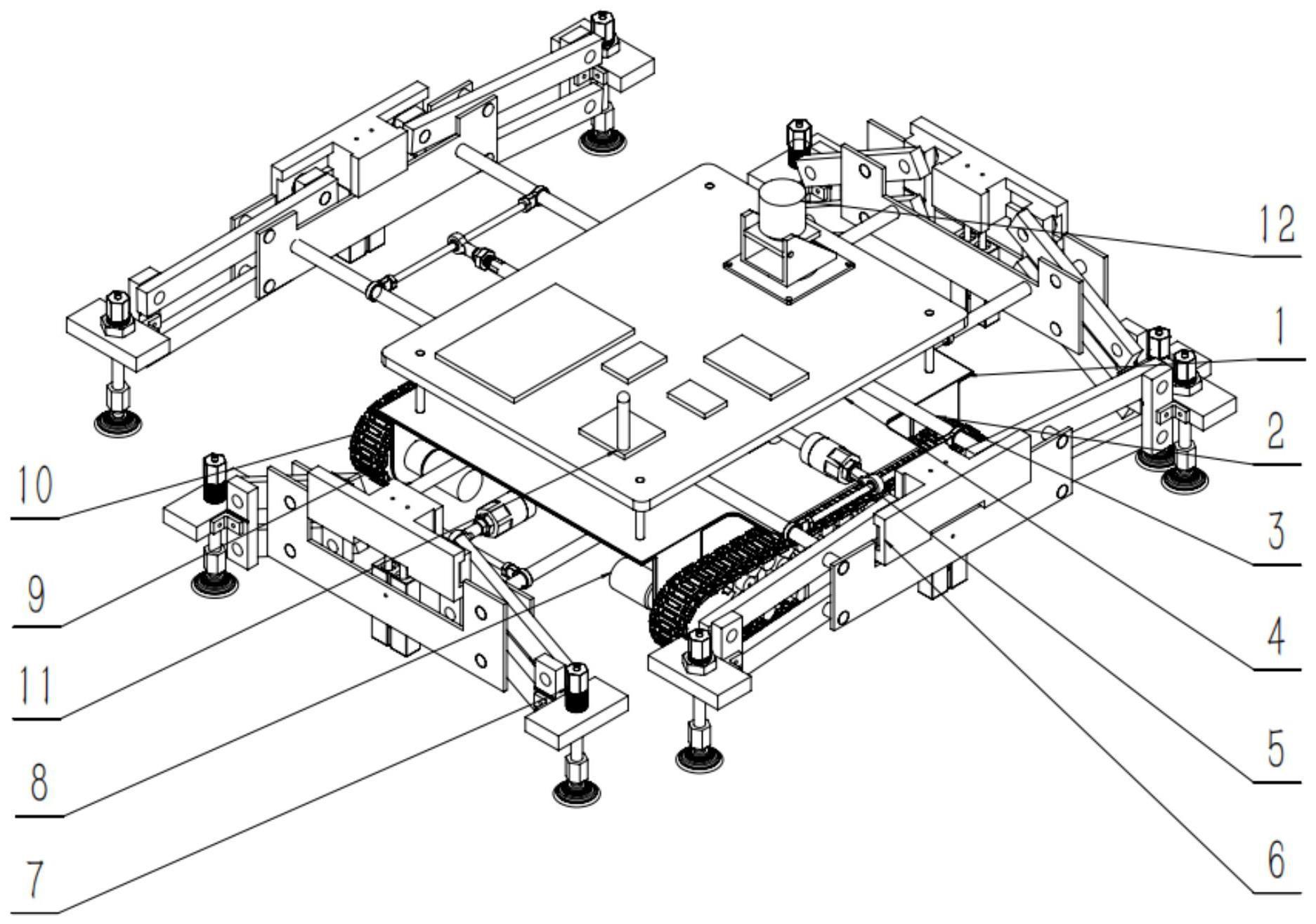
2、为解决上述技术问题,本发明提供的一种复合式吸附与足履式移动的叶片检测机器人,包括机身,所述机身底部和背部均设置有足式移动装置,所述足式移动装置包括气动驱动装置、吸盘收放装置以及负压吸附装置;
3、所述机身两侧均设置有履带移动装置,所述履带移动装置包括直流减速电机,履带装置,永磁吸附装置;
4、所述机身上设置有电子元件架,上面装有控制-通讯设备,还设有用于叶片检测的二维云台。
5、优选的,所述足式移动装置的气动驱动装置,包括气缸、导轨、锁紧环、连接件、导轨座;
6、所述气缸分别设置在机身上端和下端,气缸两边分别设置有两个导轨,导轨与气缸平行,连接件连接在两导轨之间以保证两根导轨平行,每个导轨上安装有两个导轨座,导轨座对称固定在机身上。
7、优选的,所述足式移动装置的吸盘收放装置,包括t型连接件、上支撑杆、下支撑杆、连杆、小型气缸、吸盘收放装置下端支架、活塞杆、吸盘收放装置上端支架、轴承;
8、吸盘收放装置下端支架将吸盘收放装置通过锁紧环与导轨连接,小型气缸安装在吸盘收放装置下端支架上,小型气缸通过活塞杆与吸盘收放装置上端支架连接,吸盘收放装置上端支架还设置有用于安装轴承的轴承槽,轴承、连杆与上支撑杆铰接,上支撑杆另一端与t型连接件铰接,连杆和吸盘收放装置下端支架竖直平行,另一端与下支撑杆铰接,下支撑杆与上支撑杆平行,下支撑杆的另一端铰接在t型连接件上,上支撑杆和下支撑杆在距离连杆1/3处与吸盘收放装置下端支架铰接。
9、优选的,所述足式移动装置的负压吸附装置包括吸盘支架,弹簧,吸盘底座,吸盘,鱼眼接头;
10、吸盘装在吸盘底座上,吸盘底座与吸盘支架之间由鱼眼接头连接,吸盘支架通过t型连接件与吸盘收放装置相连接。
11、优选的,所述履带移动装置设置在机身两侧,主动齿轮,履带支架,弹簧阻尼机构,从动齿轮;
12、该装置中主动齿轮与直流减速电机通过联轴器连接,直流减速电机安装在机身上,履带装置安装在履带支架上,履带装置上设有永磁吸附装置,履带支架上设置有弹簧阻尼机构,保证了履带移动装置在越过障碍物时永磁吸附装置依然能贴合风机塔筒壁面。
13、与相关技术相比较,本发明提供的一种复合式吸附与足履式移动的叶片检测机器人具有如下有益效果:
14、本发明提供复合式吸附与足履式移动的叶片检测机器人,采用永磁吸附和负压吸附切换的吸附方式,履带、足式切换的移动方式,在塔筒表面采用永磁吸附和履带移动,在叶片表面采用负压吸附和足式行走,保证了爬行速度和稳定吸附能力。
15、本发明提供复合式吸附与足履式移动的叶片检测机器人,通过采用柔性模块,在吸附模块加入弹簧机构、和鱼眼接头,在移动模块加入弹簧阻尼机构,解决了在不规则曲面吸附和行走的问题,提高对曲面的适应性。
16、本发明提供复合式吸附与足履式移动的叶片检测机器人,采用平行四边形机构的吸盘收放装置,且使用气缸作为驱动装置,使得吸盘的收放快速、准确,吸附稳定性得到了提高。
17、本发明提供复合式吸附与足履式移动的叶片检测机器人,采用气缸驱动的足式移动方式,使得机器人结构简单、轻便、安装维护简单,移动速度快。
技术特征:
1.一种复合式吸附与足履式移动的叶片检测机器人,其特征在于:
2.根据权利要求1所述的一种复合式吸附与足履式移动的叶片检测机器人,其特征在于,所述足式移动装置(2)的气动驱动装置(5),包括气缸(13)、导轨(14)、锁紧环(15)、连接件(16)、导轨座(17);
3.根据权利要求2所述的一种复合式吸附与足履式移动的叶片检测机器人,其特征在于,所述足式移动装置(2)的吸盘收放装置(6),包括t型连接件(18)、上支撑杆(19)、下支撑杆(20)、连杆(21)、小型气缸(22)、吸盘收放装置下端支架(23)、活塞杆(24)、吸盘收放装置上端支架(25)、轴承(26);
4.根据权利要求1所述的一种复合式吸附与足履式移动的叶片检测机器人,其特征在于,所述足式移动装置(2)的负压吸附装置(7)包括吸盘支架(27),弹簧(28),吸盘底座(29),吸盘(30),鱼眼接头(31);
5.根据权利要求1所述的一种复合式吸附与足履式移动的叶片检测机器人,其特征在于,所述履带移动装置(3)设置在机身(1)两侧,还包括主动齿轮(32),履带支架(33),弹簧阻尼机构(34),从动齿轮(35);
技术总结
本发明公开了一种复合式吸附与足履式移动的叶片检测机器人,涉及风电检测技术领域,包括机身,机身底部和背部均设置有足式移动装置,足式移动装置包括气动驱动装置、吸盘收放装置以及负压吸附装置;本发明采用永磁吸附和负压吸附切换的吸附方式,履带、足式切换的移动方式,在塔筒表面采用永磁吸附和履带移动,在叶片表面采用负压吸附和足式行走,保证了爬行速度和稳定吸附能力;采用柔性模块,在吸附模块加入弹簧机构、和鱼眼接头,在移动模块加入弹簧阻尼机构,解决了在不规则曲面吸附和行走的问题,提高对曲面的适应性;采用平行四边形机构的吸盘收放装置,且使用气缸作为驱动装置,使得吸盘的收放快速、准确,吸附稳定性得到了提高。
技术研发人员:张岩,胡晓林,黄华,聂兴毅,张晖旺,殷金辉,鲁亮,李平,魏泰,郭虎全,何江平
受保护的技术使用者:兰州理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!