一种专用于风力发电机叶片的四自由度轮式机器人的制作方法
本发明属于检修用机器人,尤其涉及一种专用于风力发电机叶片的四自由度轮式机器人。
背景技术:
1、风能作为一种清洁的可再生能源,在未来它的发展潜力巨大,是未来能源结构的重要组成之一。随着风电市场逐渐成熟,大型的风电机组也相继出现,风电机组的各核心部件的尺寸也越来越大,给维护检测带来了不小的挑战。风电叶片则是风电机组中核心部件之一,它的性能直接影响风力发电系统的工作和效率。
2、风电叶片在生产、运输以及使用过程中都会使风电叶片产生一定的缺陷,此时需要对风电叶片进行检测。叶片内部尖端处的尺寸在20cm左右,且具有15°以内的倾角,无法人工进入叶片内部深处检测,因此,亟需一种专用于风力发电机叶片的四自由度轮式机器人。
技术实现思路
1、本发明的目的是提供一种专用于风力发电机叶片的四自由度轮式机器人,以解决上述问题。
2、为实现上述目的,本发明提供了如下方案:
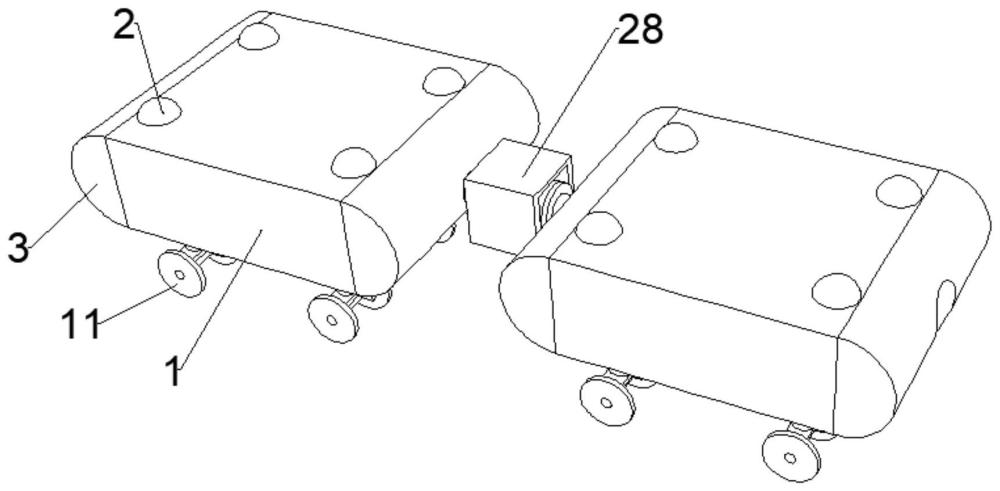
3、一种专用于风力发电机叶片的四自由度轮式机器人,包括:两设置为扁平状的行走部,两所述行走部的端部之间通过四自由度活动机构连接,其中一个所述行走部远离另一所述行走部的一端安装有摄像组件;
4、所述四自由度活动机构包括安装块,所述安装块内开设有贯穿的安装腔,所述安装腔内设置有四自由度连接组件,所述四自由度连接组件分别与两所述行走部固接。
5、优选的,所述四自由度连接组件包括两转环,两所述转环分别设置在所述安装腔的两端,所述转环的外侧壁上固接有两第二短轴,两所述第二短轴同轴设置,两所述第二短轴远离所述转环的一端分别转动连接在所述安装腔相对的两内侧壁上;
6、所述转环的内侧壁上转动连接有两第一短轴,两所述第一短轴同轴设置,所述第一短轴远离所述转环的一端固接有半球,所述半球的凸面上固接有多个环齿,多个所述环齿等间隔设置,多个所述环齿同轴设置,两所述半球上的多个环齿之间相互啮合,两所述第一短轴与两所述第二短轴的轴线的交点位于所述半球的球心处,所述半球的平面上固接有连接板,所述连接板远离所述半球的一侧固接有连接杆,所述连接杆与所述行走部固接。
7、优选的,所述行走部包括外壳体,所述外壳体内设置有动力机构,所述动力机构传动连接有四个滚轮,所述滚轮设置在所述外壳体外,四个所述滚轮分别位于所述外壳体的底面四角处,所述外壳体的顶面四角处均嵌设有滚球,所述滚球与所述外壳体滑动连接,所述滚球伸出所述外壳体的顶面。
8、优选的,所述动力机构包括固接在所述外壳体内的双轴电机,所述双轴电机电性连接有电池块,所述电池块固接在所述外壳体内,所述双轴电机的两个轴上均同轴固接有第二锥齿轮,所述第二锥齿轮啮合有位于所述外壳体同一端的两第三锥齿轮,所述第三锥齿轮与所述滚轮传动连接。
9、优选的,所述外壳体的两端均固接有固定板,所述固定板上固接有第一电机,所述第一电机的输出轴上同轴固接有第一锥齿轮,所述第一锥齿轮啮合有第六锥齿轮,所述第六锥齿轮同轴固接在第一转筒的顶端,所述第一转筒与所述外壳体转动连接,所述第一转筒的底端穿出所述外壳体,所述第一转筒内竖直滑动连接有滑筒,所述滑筒的顶端固接有第一弹簧,所述第一弹簧的顶端固接有限位块,所述限位块周向固接在所述第一转筒的内侧壁上,所述滑筒的底端伸出所述第一转筒且固接有连接架,所述连接架上固接有两第一轴承,两所述第一轴承同轴设置,两所述第一轴承之间转动连接有转轴,所述转轴的两端穿出所述第一轴承且与所述滚轮固接;
10、所述第一转筒与所述滑筒之间设置有第一限位组件。
11、优选的,所述第一限位组件包括开设在所述第一转筒内的第一滑槽,所述第一滑槽沿所述第一转筒的长度方向设置,所述第一滑槽内滑动连接有第一滑块,所述第一滑块与所述滑筒的外侧壁固接。
12、优选的,所述第三锥齿轮同轴固接有第二转筒,所述第二转筒通过第二轴承同轴转动连接在所述第一转筒内,所述第二转筒与所述限位块的内缘处以及所述滑筒的内侧壁滑动接触,所述第二转筒内竖直滑动连接有滑杆,所述滑杆的顶端固接有第二弹簧,所述第二弹簧的顶端与所述第三锥齿轮固接,所述滑杆的底端穿出所述滑筒且同轴固接有第五锥齿轮,所述第五锥齿轮啮合有第四锥齿轮,所述第四锥齿轮同轴固接在所述转轴上;
13、所述第二转筒与所述滑杆之间设置有第二限位组件。
14、优选的,所述第二限位组件包括开设在所述第二转筒内侧壁上的第二滑槽,所述第二滑槽沿所述第二转筒的长度方向设置,所述第二滑槽内滑动连接有第二滑块,所述第二滑块与所述滑杆的外侧壁固接。
15、优选的,所述外壳体的两端均固接有弧形护板,所述弧形护板与所述连接杆固接,其中一个所述外壳体上远离所述连接杆的所述弧形护板上开设有通孔,所述摄像组件安装在所述通孔内。
16、优选的,所述摄像组件包括固接在所述固定板上的摄像头,所述摄像头位于所述弧形护板内,所述摄像头的摄像端正对所述通孔,所述通孔内固定安装有防护玻璃。
17、与现有技术相比,本发明具有如下优点和技术效果:
18、本发明中,通过四自由度活动机构连接两个设置为扁平状的行走部,其中一个行走部上安装有摄像组件,在使用时,通过两行走部驱动轮式机器人行走,通过摄像组件对风电叶片进行拍摄,四自由度活动机构使轮式机器人能够实现跃障、爬坡、转弯、等功能,适合复杂形状的探测需求。同时行走部设置为扁平状,能够在狭长型管道中进行作业,适用性更强。
技术特征:
1.一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于,包括:两设置为扁平状的行走部,两所述行走部的端部之间通过四自由度活动机构连接,其中一个所述行走部远离另一所述行走部的一端安装有摄像组件;
2.根据权利要求1所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述四自由度连接组件包括两转环(29),两所述转环(29)分别设置在所述安装腔的两端,所述转环(29)的外侧壁上固接有两第二短轴(34),两所述第二短轴(34)同轴设置,两所述第二短轴(34)远离所述转环(29)的一端分别转动连接在所述安装腔相对的两内侧壁上;
3.根据权利要求2所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述行走部包括外壳体(1),所述外壳体(1)内设置有动力机构,所述动力机构传动连接有四个滚轮(11),所述滚轮(11)设置在所述外壳体(1)外,四个所述滚轮(11)分别位于所述外壳体(1)的底面四角处,所述外壳体(1)的顶面四角处均嵌设有滚球(2),所述滚球(2)与所述外壳体(1)滑动连接,所述滚球(2)伸出所述外壳体(1)的顶面。
4.根据权利要求3所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述动力机构包括固接在所述外壳体(1)内的双轴电机(8),所述双轴电机(8)电性连接有电池块(7),所述电池块(7)固接在所述外壳体(1)内,所述双轴电机(8)的两个轴上均同轴固接有第二锥齿轮(9),所述第二锥齿轮(9)啮合有位于所述外壳体(1)同一端的两第三锥齿轮(10),所述第三锥齿轮(10)与所述滚轮(11)传动连接。
5.根据权利要求4所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述外壳体(1)的两端均固接有固定板(4),所述固定板(4)上固接有第一电机(5),所述第一电机(5)的输出轴上同轴固接有第一锥齿轮(6),所述第一锥齿轮(6)啮合有第六锥齿轮(18),所述第六锥齿轮(18)同轴固接在第一转筒(20)的顶端,所述第一转筒(20)与所述外壳体(1)转动连接,所述第一转筒(20)的底端穿出所述外壳体(1),所述第一转筒(20)内竖直滑动连接有滑筒(17),所述滑筒(17)的顶端固接有第一弹簧(22),所述第一弹簧(22)的顶端固接有限位块(21),所述限位块(21)周向固接在所述第一转筒(20)的内侧壁上,所述滑筒(17)的底端伸出所述第一转筒(20)且固接有连接架(37),所述连接架(37)上固接有两第一轴承(14),两所述第一轴承(14)同轴设置,两所述第一轴承(14)之间转动连接有转轴,所述转轴的两端穿出所述第一轴承(14)且与所述滚轮(11)固接;
6.根据权利要求5所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述第一限位组件包括开设在所述第一转筒(20)内的第一滑槽,所述第一滑槽沿所述第一转筒(20)的长度方向设置,所述第一滑槽内滑动连接有第一滑块(24),所述第一滑块(24)与所述滑筒(17)的外侧壁固接。
7.根据权利要求6所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述第三锥齿轮(10)同轴固接有第二转筒(25),所述第二转筒(25)通过第二轴承(19)同轴转动连接在所述第一转筒(20)内,所述第二转筒(25)与所述限位块(21)的内缘处以及所述滑筒(17)的内侧壁滑动接触,所述第二转筒(25)内竖直滑动连接有滑杆(16),所述滑杆(16)的顶端固接有第二弹簧(23),所述第二弹簧(23)的顶端与所述第三锥齿轮(10)固接,所述滑杆(16)的底端穿出所述滑筒(17)且同轴固接有第五锥齿轮(15),所述第五锥齿轮(15)啮合有第四锥齿轮(13),所述第四锥齿轮(13)同轴固接在所述转轴上;
8.根据权利要求7所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述第二限位组件包括开设在所述第二转筒(25)内侧壁上的第二滑槽,所述第二滑槽沿所述第二转筒(25)的长度方向设置,所述第二滑槽内滑动连接有第二滑块(26),所述第二滑块(26)与所述滑杆(16)的外侧壁固接。
9.根据权利要求5所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述外壳体(1)的两端均固接有弧形护板(3),所述弧形护板(3)与所述连接杆(27)固接,其中一个所述外壳体(1)上远离所述连接杆(27)的所述弧形护板(3)上开设有通孔,所述摄像组件安装在所述通孔内。
10.根据权利要求9所述的一种专用于风力发电机叶片的四自由度轮式机器人,其特征在于:所述摄像组件包括固接在所述固定板(4)上的摄像头(36),所述摄像头(36)位于所述弧形护板(3)内,所述摄像头(36)的摄像端正对所述通孔,所述通孔内固定安装有防护玻璃(35)。
技术总结
本发明属于检修用机器人技术领域,尤其涉及一种专用于风力发电机叶片的四自由度轮式机器人,包括:两设置为扁平状的行走部,两行走部的端部之间通过四自由度活动机构连接,其中一个行走部远离另一行走部的一端安装有摄像组件;本发明中,通过四自由度活动机构连接两个设置为扁平状的行走部,其中一个行走部上安装有摄像组件,在使用时,通过两行走部驱动轮式机器人行走,通过摄像组件对风电叶片进行拍摄,四自由度活动机构使轮式机器人能够实现跃障、爬坡、转弯、等功能,适合复杂形状的探测需求。同时行走部设置为扁平状,能够在狭长型管道中进行作业,适用性更强。
技术研发人员:刘锐峰,孟勇,高务文,段智
受保护的技术使用者:宁夏大唐国际红寺堡新能源有限责任公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!