履带式摆臂机器人行走机构的制作方法
本发明属于机器人,尤其是涉及一种履带式摆臂机器人的行走机构。
背景技术:
1、履带式摆臂机器人在恶劣复杂的环境,比如泥泞、沙土、沟壑等类型的地面工况下,具备较好的动力和越野能力。如何从设计上统筹行走机构的布局,并在尽量低成本、结构简单化下还能实现大负载驱动、更强的复杂路况通过能力,是本发明需要解决的问题。
技术实现思路
1、有鉴于此,本发明提出一种履带式摆臂机器人行走机构,具体为:
2、履带式摆臂机器人行走机构,包括机箱、两条主履带、两条前摆臂和两条后摆臂,在机箱内固接有五个电机:
3、一个前摆臂驱动电机,其连接驱动两条前摆臂同步摆动;
4、两个履带驱动电机,分别位于机箱内前部的左、右侧,每个履带驱动电机连接驱动同一侧的前摆臂履带、主履带和后摆臂履带同步且同方向的转动;
5、两个后摆臂电机,分别位于机箱内后部的左、右侧,每个后摆臂电机各自经减速增扭的传动单元连接驱动一组后摆臂摆动;
6、且位于机箱下方的主履带的接地面高于前摆臂履带和后摆臂履带的接地面。
7、前摆臂驱动电机、两个后摆臂电机分别各匹配连接有一蜗轮蜗杆减速器。
8、蜗轮蜗杆减速器型号为rv30,具有一个输入端和两个输出端。
9、前摆臂驱动电机以及匹配连接的蜗轮蜗杆减速器固定于机箱前部的中央,该蜗轮蜗杆减速器的两个输出端分别同轴固接一前摆臂传动轴的一端,每个前摆臂传动轴的另一端经前摆臂法兰盘固接一前摆臂组件的一端;
10、每个前摆臂传动轴分别套接有一法兰轴承座,每个法兰轴承座的内圈部与前摆臂传动轴相固接,外圈部分别与机箱和蜗轮蜗杆减速器通过螺栓固定连接;
11、每个前摆臂传动轴上在法兰轴承座与前摆臂法兰盘之间还通过轴承转动连接有一前轮毂,前轮毂上依次固定套接有主履带前轮、主履带驱动大轮和前摆臂大轮;
12、两个履带驱动电机分别固定于机箱内前部的左右两侧,每侧的履带驱动电机的电机轴伸出机箱外的端部同轴固接有主履带驱动小轮,同侧的主履带驱动小轮与主履带驱动大轮通过一条行走驱动同步带传动连接;
13、每侧的前摆臂大轮与同侧前摆臂组件的前摆臂小轮通过一条前摆臂履带传动连接;
14、两个后摆臂电机分别固定于机箱内后部的左、右侧,每侧的后摆臂电机的电机轴与相匹配的蜗轮蜗杆减速器的输入端同轴传动连接,该蜗轮蜗杆减速器的两输出端同轴固接一根输出轴,输出轴伸出机箱外的端部同轴固接有后摆臂驱动小轮;
15、在机箱后端箱体外的左右两侧分别固接有一后轮支撑架,后轮支撑架转动连接一根行走传动轴,主履带后轮和后摆臂大轮与行走传动轴同轴固接,后摆臂驱动大轮夹在主履带后轮和后摆臂大轮之间,行走传动轴与一轴承法兰座的内圈部同轴固接,该轴承法兰座的外圈部与后摆臂组件的一端以及后摆臂驱动大轮相固接;
16、同侧的主履带前轮与主履带后轮通过一条主履带传动连接;
17、同侧的后摆臂驱动小轮与后摆臂驱动大轮通过一条后摆臂摆动同步带传动连接;
18、同侧的后摆臂大轮与后摆臂组件的后摆臂小轮通过一条后摆臂履带传动连接。
19、履带驱动电机的电机轴与前摆臂驱动电机的电机轴、后摆臂电机的电机轴相垂直,履带驱动电机的电机轴与前摆臂传动轴、行走传动轴相平行。
20、主履带前轮、主履带后轮、前摆臂大轮和后摆臂大轮的轮径相等,主履带的整体齿高小于前摆臂履带和后摆臂履带的整体齿高。
21、后轮支撑架呈匚型,中部底板通过螺栓紧固件与机箱箱体相固接,行走传动轴穿经并转动连接后轮支撑架的两块耳板。
22、行走传动轴通过自身台阶、凹槽与黄铜轴承的配合限制其在后轮支撑架上沿自身轴向方向的移动,黄铜轴承与后轮支撑架相固定。
23、本发明结构简洁、紧凑,性能可靠,成本低廉,能实现大负载驱动,具有较强的越障、爬梯功能。
技术特征:
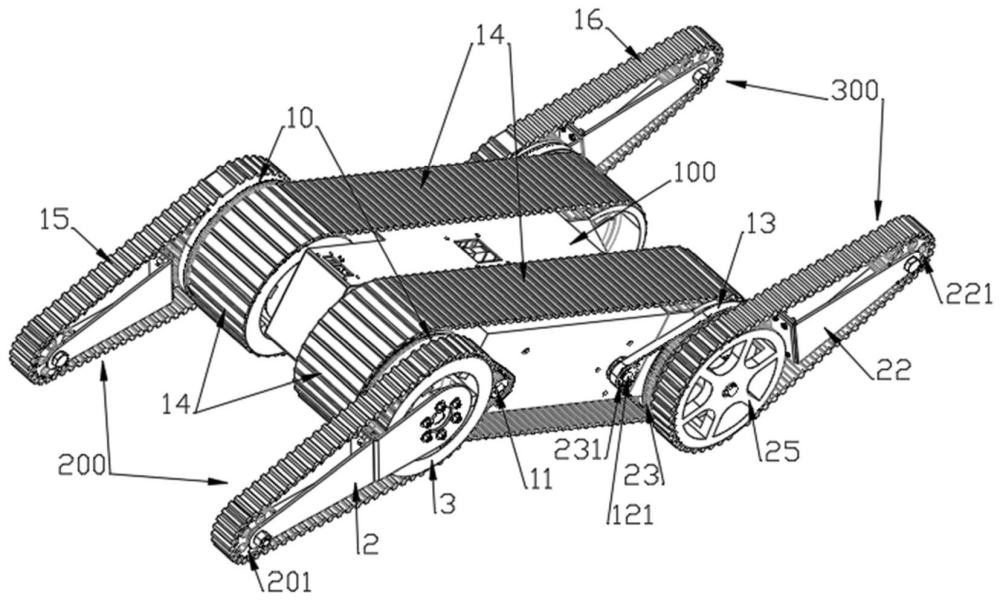
1.履带式摆臂机器人行走机构,其特征在于,包括机箱(100)、两条主履带(14)、两条前摆臂(200)和两条后摆臂(300),在机箱内固接有五个电机:
2.根据权利要求1所述的履带式摆臂机器人行走机构,其特征在于,前摆臂驱动电机(91)、两个后摆臂电机(12)分别各匹配连接有一蜗轮蜗杆减速器。
3.根据权利要求1所述的履带式摆臂机器人行走机构,其特征在于,前摆臂驱动电机(91)以及匹配连接的蜗轮蜗杆减速器固定于机箱前部的中央,该蜗轮蜗杆减速器的两个输出端分别同轴固接一前摆臂传动轴(1)的一端,每个前摆臂传动轴(1)的另一端经前摆臂法兰盘(5)固接一前摆臂组件(2)的一端;
4.根据权利要求3所述的履带式摆臂机器人行走机构,其特征在于,履带驱动电机(11)的电机轴与前摆臂驱动电机(91)的电机轴、后摆臂电机(12)的电机轴相垂直,履带驱动电机(11)的电机轴与前摆臂传动轴(1)、行走传动轴(18)相平行。
5.根据权利要求3所述的履带式摆臂机器人行走机构,其特征在于,主履带前轮(6)、主履带后轮(24)、前摆臂大轮(3)和后摆臂大轮(25)的轮径相等,主履带(14)的整体齿高小于前摆臂履带(15)和后摆臂履带(16)的整体齿高。
6.根据权利要求3所述的履带式摆臂机器人行走机构,其特征在于,后轮支撑架呈匚型,中部底板通过螺栓紧固件与机箱箱体相固接,行走传动轴(18)穿经并转动连接后轮支撑架的两块耳板。
7.根据权利要求3所述的履带式摆臂机器人行走机构,其特征在于,行走传动轴(18)通过自身台阶、凹槽与黄铜轴承(20)的配合限制其在后轮支撑架(19)上沿自身轴向方向的移动,黄铜轴承(20)与后轮支撑架(19)相固定。
技术总结
本发明提供了一种履带式摆臂机器人行走机构,包括机箱、两条主履带、两条前摆臂和两条后摆臂,在机箱内固接有五个电机,一个前摆臂驱动电机连接驱动两条前摆臂同步摆动;两个履带驱动电机,分别位于机箱内前部的左、右侧,每个履带驱动电机连接驱动同一侧的前摆臂履带、主履带和后摆臂履带同步且同方向的转动;两个后摆臂电机,分别位于机箱内后部的左、右侧,每个后摆臂电机各自经减速增扭的传动单元连接驱动一组后摆臂摆动;且在平坦硬路面上,由位于机箱下方的前摆臂的履带和后摆臂的履带直接接触路面。本发明结构简洁、紧凑,性能可靠,成本低廉,能实现大负载驱动,具有较强的越障、松软地面通过性,以及较强的爬楼梯功能。
技术研发人员:胡程量,王学峰,马云龙,林毅,刘玉茹,张志贤,都奕辰,杨丽娟
受保护的技术使用者:一汽模具(天津)有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!