一种用于纯电动汽车的自动转向控制方法与流程
本发明属于纯电动汽车自动控制,具体而言,涉及一种用于纯电动汽车的自动转向控制方法。
背景技术:
1、目前,市面上纯电动汽车的异型方向盘,通常为只具有3点和9点位置的方向盘,该类异型方向盘下部可提供更大的驾驶员腿部空间,增加舒适度和便利性,上部没有遮拦,可以拓宽驾驶员视野,此外由于只具有3点和9点的抓握位置,因此有助于形成良好的驾驶习惯,然而该类异型方向盘形状固定,在车辆行驶状态发生改变的情况下,无法根据车辆做出主动调整,导致驾驶体验感降低。
技术实现思路
1、本发明针对现有技术的不足,提供一种用于纯电动汽车的自动转向控制方法,基于行驶路段偏转角度不同,控制方向盘进行不同的伸缩变化,从而兼顾行车安全以及驾驶视野;基于车流量大小不同以及车速大小不同,控制方向盘伸缩结构及尺寸调节机构动作,为驾驶者提供支撑同时保证行车安全;基于转向方向不同,控制方向盘动作,为驾驶员提供支撑从而平衡转向时的离心力;在驻车状态,控制方向盘向靠近仪表盘方向转动,为驾驶者提供上下车空间。
2、为实现本发明的技术目的,本发明将采取以下的技术方案:
3、一种用于纯电动汽车的自动转向控制方法,所述控制方法适用于异型方向盘,所述异型方向盘包括9点抓握部,3点抓握部,9点尺寸调节结构、3点尺寸调节结构和中央部,9点抓握部和3点抓握部为圆弧结构,9点尺寸调节结构、3点尺寸调节结构与中央部可转动连接,通过使尺寸调节结构在转动过程中与中央部之间的水平距离发生变化,从而调节9点抓握部与3点抓握部之间的间距;
4、9点抓握部和3点抓握部内均设置有圆弧状的伸出部,伸出部包括外侧伸出部及内侧伸出部,在伸出部伸出,方向盘形成完整结构;
5、所述控制方法搭载于异型方向盘控制系统,所述异型方向盘控制系统包括中央控制模块、路况获取模块、车速探测模块、方向盘转速探测模块、尺寸调节驱动模块、伸出结构驱动模块;
6、其中路况获取模块的输入端连接车载导航装置,用于获取当前道路车流量情况、行驶路线,输出端连接中央控制模块;车速探测模块用于实时获取车辆当前车速;方向盘转速探测模块用于实时获取车辆方向盘的转速;尺寸调节驱动模块用于驱动9点尺寸调节结构和/或3点尺寸调节结构转动;伸出部驱动模块用于驱动伸出部伸缩,伸出部的默认状态为完全缩进抓握部的状态;
7、所述控制方法具体步骤如下:
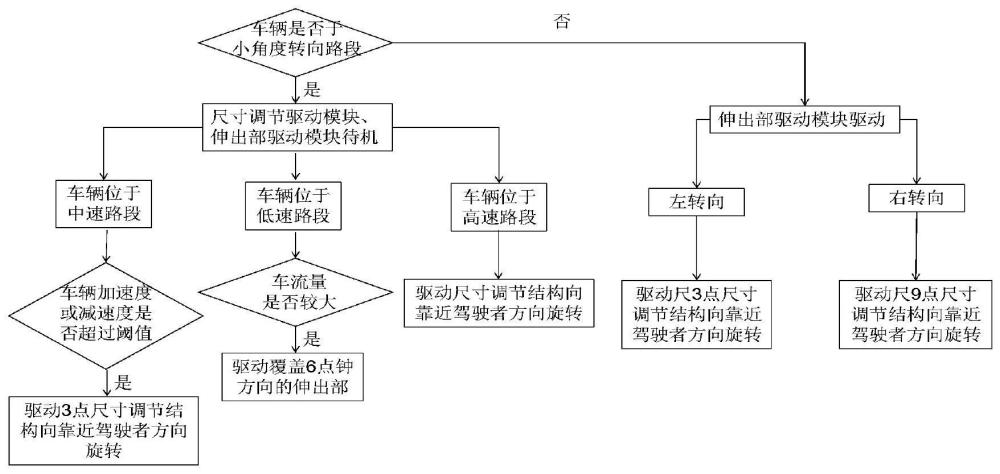
8、s1:通过路况获取模块获取车辆行驶路线,基于车辆在所述行驶路线上,方向盘对应的理论偏转角度,将行驶路线划分为小角度转向段以及大角度转向段;中央控制模块判断车辆当前所述路段,当车辆位于小角度偏转段,控制尺寸调节驱动模块与伸出部驱动模块均处于待机状态,并进入步骤s2,当车辆位于大角度转向段,控制伸出部驱动模块开启驱动全部伸出部伸出,并进入步骤s3,当车辆离开大角度转向段,控制伸出部驱动模块开启驱动伸出部缩回,再控制控制伸出部驱动模块进入待机状态,并进入步骤s2;
9、s2:通过车速探测模块获取当前车辆车速,若车速位于低速段,则开启路况获取模块获取当前道路车流量情况,若车流量较大,则控制伸出部驱动模块开启驱动覆盖6点钟方向的伸出部伸出;若车速位于中速段,则判断当前车辆的加速度或减速度是否超过预设阈值范围,若超过预设阈值范围,则控制3点尺寸调节结构向靠近驾驶者方向旋转;若车速位于高速段,则控制则控制9点尺寸调节结构以及3点尺寸调节结构均向远离驾驶者方向旋转;
10、s3:判断方向盘偏转方向,若为左转向,则控制3点尺寸调节结构向靠近驾驶者方向旋转,若为右转向,则控制9点尺寸调节结构向靠近驾驶者方向旋转。
11、优选地,所述步骤s2还包括通过方向盘转速探测模块获取方向盘转速,若方向盘转速超过预设阈值,则控制尺寸调节驱动模块闭锁,控制伸出部驱动模块开启驱动全部伸出部伸出。
12、优选地,所述小角度转向段对应方向盘偏转角度θ范围-90°≤θ≤90°;大角度转向段对应方向盘偏转角度θ范围θ<-90°或θ>90°。
13、优选地,所述低速度段车速v的范围为v≤30km/h,中速段车速v的范围为30km/h<v≤80km/h,中速段车速v的范围为v>80km/h。
14、优选地,以中央部所在平面为参考平面,9点尺寸调节结构和3点尺寸调节结构可以调节抓握部由参考平面向仪表盘方向转动。
15、优选地,在车速不为零的状态下,中央控制器禁止9点尺寸调节结构和3点尺寸调节结构将抓握部调节至参考平面与仪表盘之间的区域,在车速为零的状态下,中央控制器驱动9点尺寸调节结构和3点尺寸调节结构向仪表盘方向转动直至位于参考平面与仪表盘之间的区域。
16、根据上述的技术方案,相对于现有技术,本发明具有以下的优点:
17、第一、本发明设置伸缩结构及尺寸调节机构,基于行驶路段偏转角度不同,控制方向盘进行不同的伸缩变化,从而兼顾行车安全以及驾驶视野;
18、第二、本发明基于车流量大小不同以及车速大小不同,控制方向盘伸缩结构及尺寸调节机构动作,为驾驶者提供支撑同时保证行车安全;
19、第三、本发明基于转向方向不同,控制方向盘动作,为驾驶员提供支撑从而平衡转向时的离心力;
20、第四、本发明在驻车状态,控制方向盘向靠近仪表盘方向转动,为驾驶者提供上下车空间。
技术特征:
1.一种用于纯电动汽车的自动转向控制方法,其特征在于,所述控制方法适用于异型方向盘,所述异型方向盘包括9点抓握部,3点抓握部,9点尺寸调节结构、3点尺寸调节结构和中央部,9点抓握部和3点抓握部为圆弧结构,9点尺寸调节结构、3点尺寸调节结构与中央部可转动连接,通过使尺寸调节结构在转动过程中与中央部之间的水平距离发生变化,从而调节9点抓握部与3点抓握部之间的间距;
2.根据权利要求1所述的一种用于纯电动汽车的自动转向控制方法,其特征在于,所述步骤s2还包括通过方向盘转速探测模块获取方向盘转速,若方向盘转速超过预设阈值,则控制尺寸调节驱动模块闭锁,控制伸出部驱动模块开启驱动全部伸出部伸出。
3.根据权利要求1所述的一种用于纯电动汽车的自动转向控制方法,其特征在于,所述小角度转向段对应方向盘偏转角度θ范围-90°≤θ≤90°;大角度转向段对应方向盘偏转角度θ范围θ<-90°或θ>90°。
4.根据权利要求1所述的一种用于纯电动汽车的自动转向控制方法,其特征在于,所述低速度段车速v的范围为v≤30km/h,中速段车速v的范围为30km/h<v≤80km/h,中速段车速v的范围为v>80km/h。
5.根据权利要求1-3中任一所述的一种用于纯电动汽车的自动转向控制方法,其特征在于,以中央部所在平面为参考平面,9点尺寸调节结构和3点尺寸调节结构可以调节抓握部由参考平面向仪表盘方向转动。
6.根据权利要求5所述的一种用于纯电动汽车的自动转向控制方法,其特征在于,在车速不为零的状态下,中央控制器禁止9点尺寸调节结构和3点尺寸调节结构将抓握部调节至参考平面与仪表盘之间的区域,在车速为零的状态下,中央控制器驱动9点尺寸调节结构和3点尺寸调节结构向仪表盘方向转动直至位于参考平面与仪表盘之间的区域。
技术总结
本申请属于纯电动汽车自动控制技术领域,具体涉及一种用于纯电动汽车的自动转向控制方法,所述方向盘设置伸缩结构及尺寸调节机构,所述方法搭载的系统包括中央控制模块、路况获取模块、车速探测模块、方向盘转速探测模块、尺寸调节驱动模块、伸出结构驱动模块,基于行驶路段偏转角度不同,控制方向盘进行不同的伸缩变化,从而兼顾行车安全以及驾驶视野;基于车流量大小不同以及车速大小不同,控制方向盘伸缩结构及尺寸调节机构动作,为驾驶者提供支撑同时保证行车安全;基于转向方向不同,控制方向盘动作,为驾驶员提供支撑从而平衡转向时的离心力;在驻车状态,控制方向盘向靠近仪表盘方向转动,为驾驶者提供上下车空间。
技术研发人员:柳东威,华进勇,冯会健,舒雪菲,回春,张韵
受保护的技术使用者:中汽研汽车检验中心(武汉)有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!