车辆转向角控制方法和控制装置以及车辆与流程
本发明涉及车辆,尤其涉及车辆转向角控制方法和控制装置以及车辆。
背景技术:
1、车辆转向系统是安装在车辆上用来保持或改变车辆行驶方向的机构,通过它来实施转向操作就可以按照驾驶意愿控制车辆的行驶方向,这对于车辆行驶安全具有重要影响。随着科技进步和社会发展,目前也出现了许多类型的无人驾驶车辆,例如在集装箱无人码头布置agv(automated guided vehicle)用来实现集装箱自动化装运,可以全天候持续高效工作,并且能极大地节省人力成本。同样,在此类无人驾驶车辆也配置有车辆转向系统用于行车期间进行转向操作。
2、本申请经过研究发现,对于各类车辆,当它们在承载重量发生变化的情况下,例如上述的agv在装运不同集装箱时的载运重量变化会较大(如从最小承载0吨到最大承载61吨等),将会导致车辆轮胎与地面之间的摩擦力以及轮胎弹性变形变化大,这对于车辆转向角调控是不利的。例如,对于转向角控制来说,由于角公差是一个常数,因此即使转向角达到目标角度后,车轮也难以保持原位,从而导致需要反复调整角度而耗费能量,缩短了车辆转向系统的使用寿命,并且在此过程中会造成车轮频繁抖动,这对轮胎使用寿命、车辆行驶的平稳性和安全性等方面带来不利影响。
技术实现思路
1、有鉴于此,本发明提供了车辆转向角控制方法和控制装置以及车辆,从而可以解决或至少缓解现有技术中存在的上述问题和其他方面的问题中的一个或多个。
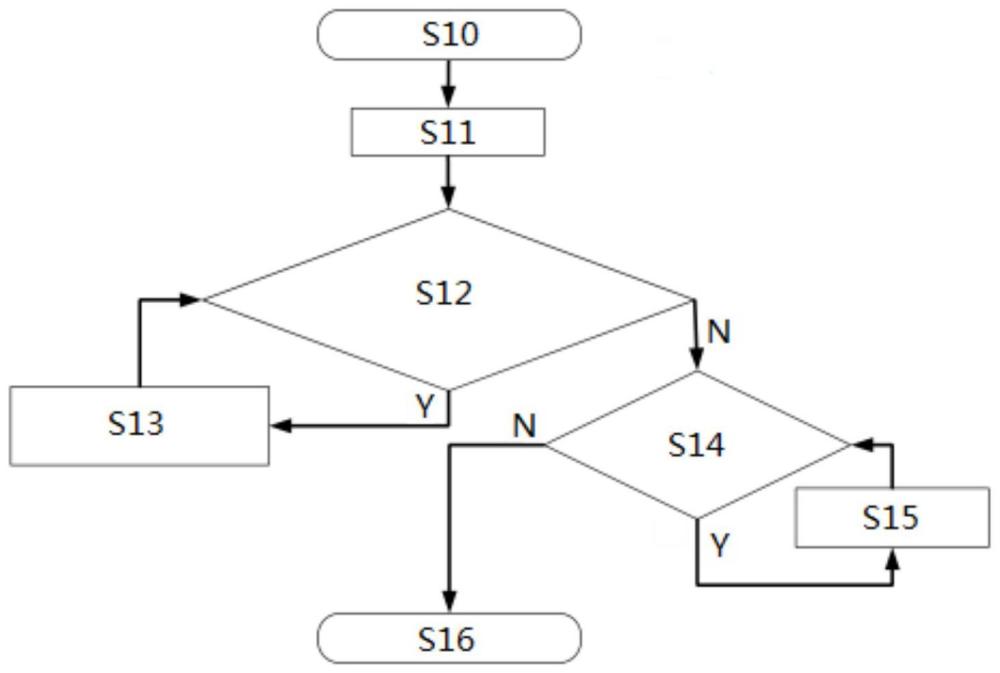
2、根据本发明的一个方面,首先提供了一种车辆转向角控制方法,包括步骤:
3、a.接收并根据车辆的转向角目标值,确定车辆转向系统中的一个或多个控制特征的对应目标值,所述控制特征与车辆转向操作相关;
4、b.根据所述对应目标值,调控所述控制特征以进行车辆转向操作;以及
5、c.获取车辆当前的转向角实际值,并判断所述转向角实际值与所述转向角目标值之间的偏差是否大于预设值:如果是,则返回步骤b;否则,开启计时器并保持车辆当前的转向角,直至达到预设时间段以使车辆轮胎至少部分地弹性形变恢复原形。
6、在根据本发明的车辆转向角控制方法中,可选地,根据所述转向角目标值确定车辆的转向角速度目标值,然后根据所述转向角速度目标值确定所述控制特征的对应目标值,所述控制特征包括所述车辆转向系统中的液压阀门的开度和电流。
7、在根据本发明的车辆转向角控制方法中,可选地,通过车辆上的角度传感器检测获取所述转向角实际值,并根据所述转向角实际值确定车辆当前的转向角速度实际值,然后根据所述转向角速度实际值与所述转向角速度目标值之间的偏差,通过pid控制方式来控制液压阀门开度以达到所述转向角目标值。
8、在根据本发明的车辆转向角控制方法中,可选地,通过车辆上的电流传感器检测获取所述液压阀门的电流实际值,然后根据所述电流实际值与其对应目标值之间偏差,通过pid控制方式来使得液压阀门电流以达到所述转向角目标值。
9、在根据本发明的车辆转向角控制方法中,可选地,所述预设值设置成不大于30°,并且/或者所述预设时间段设置成不大于10秒。
10、在根据本发明的车辆转向角控制方法中,可选地,所述车辆与位于车辆外部的控制系统进行通讯连接,并从所述控制系统接收所述转向角目标值。
11、在根据本发明的车辆转向角控制方法中,可选地,所述车辆包括无人驾驶车,所述无人驾驶车布置在集装箱货场用于装载集装箱,并且以无线通讯方式与所述控制系统相连。
12、此外,根据本发明的另一方面,还提供一种车辆转向角控制装置,其包括处理器与用于存储指令的存储器,在所述指令被执行时,所述处理器实现如以上任一项所述的车辆转向角控制方法。
13、另外,根据本发明的又一方面,进一步提供一种车辆,其特征在于,所述车辆上使用如以上任一项所述的车辆转向角控制方法,或者所述车辆包括:
14、动力系统,其提供驱动力以驱动车辆行驶;
15、车辆转向系统,其设置成在车辆行驶时进行转向操作;以及
16、如以上所述的车辆转向角控制装置,其与所述车辆转向系统相连并在车辆行驶时,根据车辆的转向角目标值调控所述车辆转向系统中的一个或多个与车辆转向操作相关的控制特征以进行车辆转向操作并达到所述转向角目标值。
17、在根据本发明的车辆中,可选地,所述车辆转向系统是液压转向系统,所述车辆包括用于在集装箱货场内装载集装箱的无人驾驶车,所述无人驾驶车以无线通讯方式与位于其外部的控制系统相连。
18、采用本发明方案能精确控制车辆转向操作,有效节省转向角调控操作时的耗能,有助于延长车辆转向系统、轮胎等的使用寿命,避免车轮在车辆转向操作时发生频繁抖动,从而可以显著提高车辆的平稳性和安全性。本发明实用性强、转向操作精确高效并且应用成本低,可广泛应用于众多类型的车辆。
技术特征:
1.一种车辆转向角控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的车辆转向角控制方法,其中,根据所述转向角目标值确定车辆的转向角速度目标值,然后根据所述转向角速度目标值确定所述控制特征的对应目标值,所述控制特征包括所述车辆转向系统中的液压阀门的开度和电流。
3.根据权利要求2所述的车辆转向角控制方法,其中,通过车辆上的角度传感器检测获取所述转向角实际值,并根据所述转向角实际值确定车辆当前的转向角速度实际值,然后根据所述转向角速度实际值与所述转向角速度目标值之间的偏差,通过pid控制方式来控制液压阀门开度以达到所述转向角目标值。
4.根据权利要求2所述的车辆转向角控制方法,其中,通过车辆上的电流传感器检测获取所述液压阀门的电流实际值,然后根据所述电流实际值与其对应目标值之间偏差,通过pid控制方式来控制液压阀门电流以达到所述转向角目标值。
5.根据权利要求1所述的车辆转向角控制方法,其中,所述预设值设置成不大于30°,并且/或者所述预设时间段设置成不大于10秒。
6.根据权利要求1-5中任一项所述的车辆转向角控制方法,其中,所述车辆与位于车辆外部的控制系统进行通讯连接,并从所述控制系统接收所述转向角目标值。
7.根据权利要求6所述的车辆转向角控制方法,其中,所述车辆包括无人驾驶车,所述无人驾驶车布置在集装箱货场用于装载集装箱,并且以无线通讯方式与所述控制系统相连。
8.一种车辆转向角控制装置,其特征在于,其包括处理器与用于存储指令的存储器,其特征在于,在所述指令被执行时,所述处理器实现如权利要求1-7中任一项所述的车辆转向角控制方法。
9.一种车辆,其特征在于,所述车辆上使用如权利要求1-7中任一项所述的车辆转向角控制方法,或者所述车辆包括:
10.根据权利要求9所述的车辆,其中,所述车辆转向系统是液压转向系统,所述车辆包括用于在集装箱货场内装载集装箱的无人驾驶车,所述无人驾驶车以无线通讯方式与位于其外部的控制系统相连。
技术总结
本发明公开了车辆转向角控制方法和控制装置以及车辆。所述车辆转向角控制方法包括步骤:A.接收并根据车辆的转向角目标值,确定车辆转向系统中的一个或多个控制特征的对应目标值,所述控制特征与车辆转向操作相关;B.根据所述对应目标值,调控所述控制特征以进行车辆转向操作;C.获取车辆当前的转向角实际值,并判断所述转向角实际值与所述转向角目标值之间的偏差是否大于预设值:如果是,则返回步骤B;否则,开启计时器并保持车辆当前的转向角,直至达到预设时间段以使车辆轮胎至少部分地弹性形变恢复原形。本发明具有转向操作精确高效、节能且延长设备使用寿命等优点,可广泛应用于众多类型的车辆。
技术研发人员:彭宇辰,胡月
受保护的技术使用者:博世力士乐(北京)液压有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!