四足机器人及其步态规划方法、装置及存储介质与流程
本技术涉及四足机器人领域,尤其涉及四足机器人及其步态规划方法、装置及存储介质。
背景技术:
1、四足机器人是具有四条腿的机器人,通过对四足机器人的步态进行规划,可以有效的使机器人在各种地形行走和保持平衡。关于四足机器人的步态生成和控制的研究,大多数集中在对角步态。对于对角步态的四足机器人,可以采用虚拟弹簧模型(英文简称为vmc,英文全称为virtual mode control)或中央模式发生器(英文简称为cpg,英文全称为central pattern generator)规划步态。
2、然而,当四足机器人为始终保持三条腿支撑的行走步态时,则无法通过vmc和cpg组合的方法简化四条腿来较好地生成步态。并且对于低刚度的四足机器人,主控频率不稳定,求解算力较低,不利于采用更高级的全身运动控制(英文简称为wbc,英文全称为wholebody control)和模型预测控制(英文简称为mpc,英文全称为model predictive control)的方法,而且四足机器人的三足着陆的特性以及关节误差较大的特点,不利于通过反馈控制的方法提升运动性能,不利于对四足机器人的步态进行有效的规划。
技术实现思路
1、有鉴于此,本技术实施例提供了一种四足机器人及其步态规划方法、装置及存储介质,以解决现有技术中不利于对四足机器人的步态进行有效的规划,不利于提升四足机器人的运动性能的问题。
2、本技术实施例的第一方面提供了一种四足机器人的步态规划方法,所述四足机器人在运动时保持三足处于支撑状态,所述方法包括:
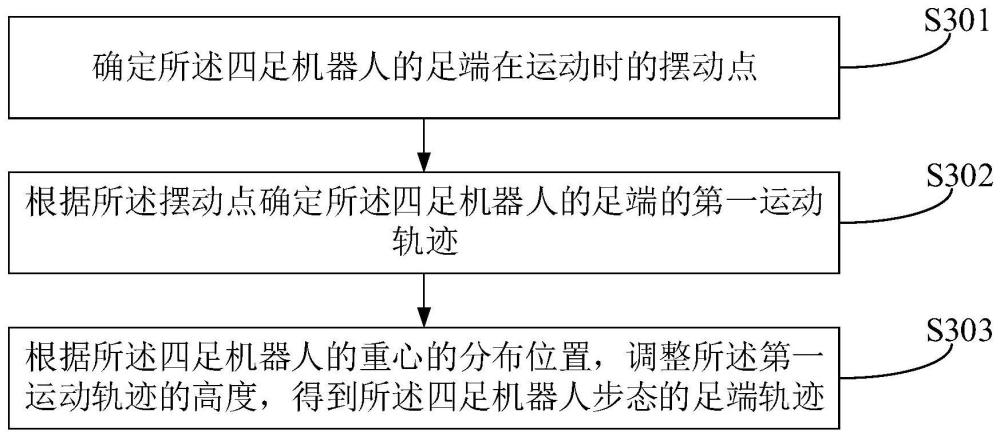
3、确定所述四足机器人的足端在运动时的摆动点;
4、根据所述摆动点确定所述四足机器人的足端的第一运动轨迹;
5、根据所述四足机器人的重心的分布位置,调整所述第一运动轨迹的高度,得到所述四足机器人步态的足端轨迹。
6、结合第一方面,在第一方面的第一种可能实现方式中,所述摆动点包括起始点、终止点和过程点;
7、根据所述摆动点确定所述四足机器人的足端的第一运动轨迹,包括:
8、根据所述起始点、终止点和过程点,通过贝塞尔插值方法生成所述第一运动轨迹。
9、结合第一方面,在第一方面的第二种可能实现方式中,根据所述四足机器人的重心的分布位置,调整所述第一运动轨迹的高度,包括:
10、确定所述四足机器人的重心相对于前后方向的第一中心线的位置;
11、根据所述重心相对于所述第一中心线的位置,调整所述四足机器人的左侧和/或右侧的第一运动轨迹的高度。
12、结合第一方面的第二种可能实现方式,在第一方面的第三种可能实现方式中,根据所述重心相对于所述第一中心线的位置,调整所述四足机器人的左侧和/或右侧的第一运动轨迹的高度,包括:
13、在所述重心位于所述第一中心线的第一侧时,相应的提升所述四足机器人的第一侧的足端的第一运动轨迹的高度,所述第一侧为左侧或右侧。
14、结合第一方面的第三种可能实现方式,在第一方面的第四种可能实现方式中,在所述重心位于所述第一中心线的第一侧时,相应的提升所述四足机器人的第一侧的足端的第一运动轨迹的高度,包括:
15、在所述重心位于所述第一中心线的第一侧时,提升所述四足机器人的第一侧的足端在运动时的摆动点中的过程点的高度,或者降低所述四足机器人的第二侧的足端在运动时的摆动点中的过程点的高度,所述第二侧为所述第一侧的相对侧。
16、结合第一方面,在第一方面的第五种可能实现方式中,根据所述四足机器人的重心的分布位置,调整所述第一运动轨迹的高度,得到所述四足机器人步态的足端轨迹,包括:
17、确定所述四足机器人的重心相对于左右方向的第二中心线的位置;
18、在所述四足机器人的重心位于所述第二中心线的第三侧时,降低第四侧的足部高度,并调整第四侧的足端的运动轨迹,所述第四侧为所述第三侧的相对侧,所述第三侧为所述第二中心线的前侧或后侧。
19、结合第一方面的第五种可能实现方式,在第一方面的第六种可能实现方式中,调整第四侧的足端的运动轨迹,包括:
20、按照预定的比例调节所述第四侧的足端在运动时摆动点中的过程点的高度;
21、根据调整后的过程点的高度,结合所述摆动点的起始点和终止点确定所述四足机器人步态的第四侧足端轨迹。
22、本技术实施例的第二方面提供了一种四足机器人的步态规划装置,所述四足机器人在运动时保持三足处于支撑状态,所述装置包括:
23、摆动点确定单元,用于确定所述四足机器人的足端在运动时的摆动点;
24、第一运动轨迹确定单元,用于根据所述摆动点确定所述四足机器人的足端的第一运动轨迹;
25、轨迹调整单元,用于根据所述四足机器人的重心的分布位置,调整所述第一运动轨迹的高度,得到所述四足机器人步态的足端轨迹。
26、结合第二方面,在第二方面的第一种可能实现方式中,所述摆动点包括起始点、终止点和过程点;
27、所述第一运动轨迹确定单元用于根据所述起始点、终止点和过程点,通过贝塞尔插值方法生成所述第一运动轨迹。
28、结合第二方面,在第二方面的第二种可能实现方式中,轨迹调整单元包括:
29、第一相对位置确定子单元,用于确定所述四足机器人的重心相对于前后方向的第一中心线的位置;
30、第一高度调节子单元,用于根据所述重心相对于所述第一中心线的位置,调整所述四足机器人的左侧和/或右侧的第一运动轨迹的高度。
31、结合第二方面的第二种可能实现方式,在第二方面的第三种可能实现方式中,所述第一高度调节子单元用于在所述重心位于所述第一中心线的第一侧时,相应的提升所述四足机器人的第一侧的足端的第一运动轨迹的高度,所述第一侧为左侧或右侧。
32、结合第二方面的第三种可能实现方式,在第二方面的第四种可能实现方式中,所述第一高度调节子单元用于在所述重心位于所述第一中心线的第一侧时,提升所述四足机器人的第一侧的足端在运动时的摆动点中的过程点的高度,或者降低所述四足机器人的第二侧的足端在运动时的摆动点中的过程点的高度,所述第二侧为所述第一侧的相对侧。
33、结合第二方面,在第二方面的第五种可能实现方式中,所述轨迹调整单元包括:
34、第二相对位置确定子单元,用于确定所述四足机器人的重心相对于左右方向的第二中心线的位置;
35、在所述四足机器人的重心位于所述第二中心线的第三侧时,降低第四侧的足部高度,并调整第四侧的足端的运动轨迹,所述第四侧为所述第三侧的相对侧,所述第三侧为所述第二中心线的前侧或后侧。
36、结合第二方面的第五种可能实现方式,在第二方面的第六种可能实现方式中,所述第二相对位置确定子单元,包括:
37、第二高度调节子模块,用于按照预定的比例调节所述第四侧的足端在运动时摆动点中的过程点的高度;
38、轨迹确定子模块,用于根据调整后的过程点的高度,结合所述摆动点的起始点和终止点确定所述四足机器人步态的第四侧足端轨迹。
39、申请实施例的第三方面提供了四足机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述方法的步骤。
40、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述方法的步骤。
41、本技术实施例与现有技术相比存在的有益效果是:本技术实施例对于保持三足处于支撑状态的四足机器人,通过确定四足机器人的足端在运动过程中的足端的摆动点,基于摆动点确定足端的第一运动轨迹,并根据四足机器人的重心的分布位置,调整第一运动轨迹的高度,使得机器人根据所调整后的第一运动轨迹平稳运动,有利于实现对运动时三足保持支撑状态的四足机器人步态进行有效规划,有利于提升四足机器人的运动性能。
- 还没有人留言评论。精彩留言会获得点赞!