一种转运固定结构的制作方法
本技术涉及转运,尤其涉及一种转运固定结构。
背景技术:
1、目前在轨道巡检机器人生产过程中,半成品加工时需要对其进行小范随着科学技术的发展,巡检机器人系统逐渐取代了人工巡检,在不同线路巡视中,一般用推车将巡视机器人来回转运,但是在运输过程中,会由于道路颠簸造成巡检机器人的晃动,对机器人本体及相关电子元器件都会造成一定的损害。
2、为此中国专利(申请号202020011628.2)公开了“一种变电站巡检机器人转运固定装置”,该装置通过带动两连接板的左右移动,连接板上的夹持座左右移动来实现对巡检机器人车轮的固定,防止机器人转运过程的横向晃动,但是该装置在应用过程中存在下述不足:
3、1、该装置的转运座过高,在转运时需要将机器人搬运至转运座上,一个人难以操作,需要两人才能将机器人抬至转运座上,不够省力;
4、2、该装置自身不具备移动能力,在将机器人放置在转运座上后,需要将转运座连同上面的机器人再次搬运至推车上,进行移动,较为麻烦。
技术实现思路
1、针对现有技术不足,本实用新型提供了一种转运固定结构,通过设置的可升降的承托机构,方便直接将机器人推至承托机构上进行转移,无需人工搬运,通过设置的夹持机构和卡轮机构可对机器人进行固定,避免机器人在转运过程中掉落,通过设置的移动轮使得底板自身能被推着进行移动,无需再将装置连同上面的机器人再次搬运至推车上,进行移动,十分方便,克服了现有技术的不足,有效解决了现有的转运固定装置的转运座过高,在转运时需要将机器人搬运至转运座上,不够省力和自身不具备移动功能,需要将转运座连同上面的机器人再次搬运至推车上,进行移动,较为麻烦的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
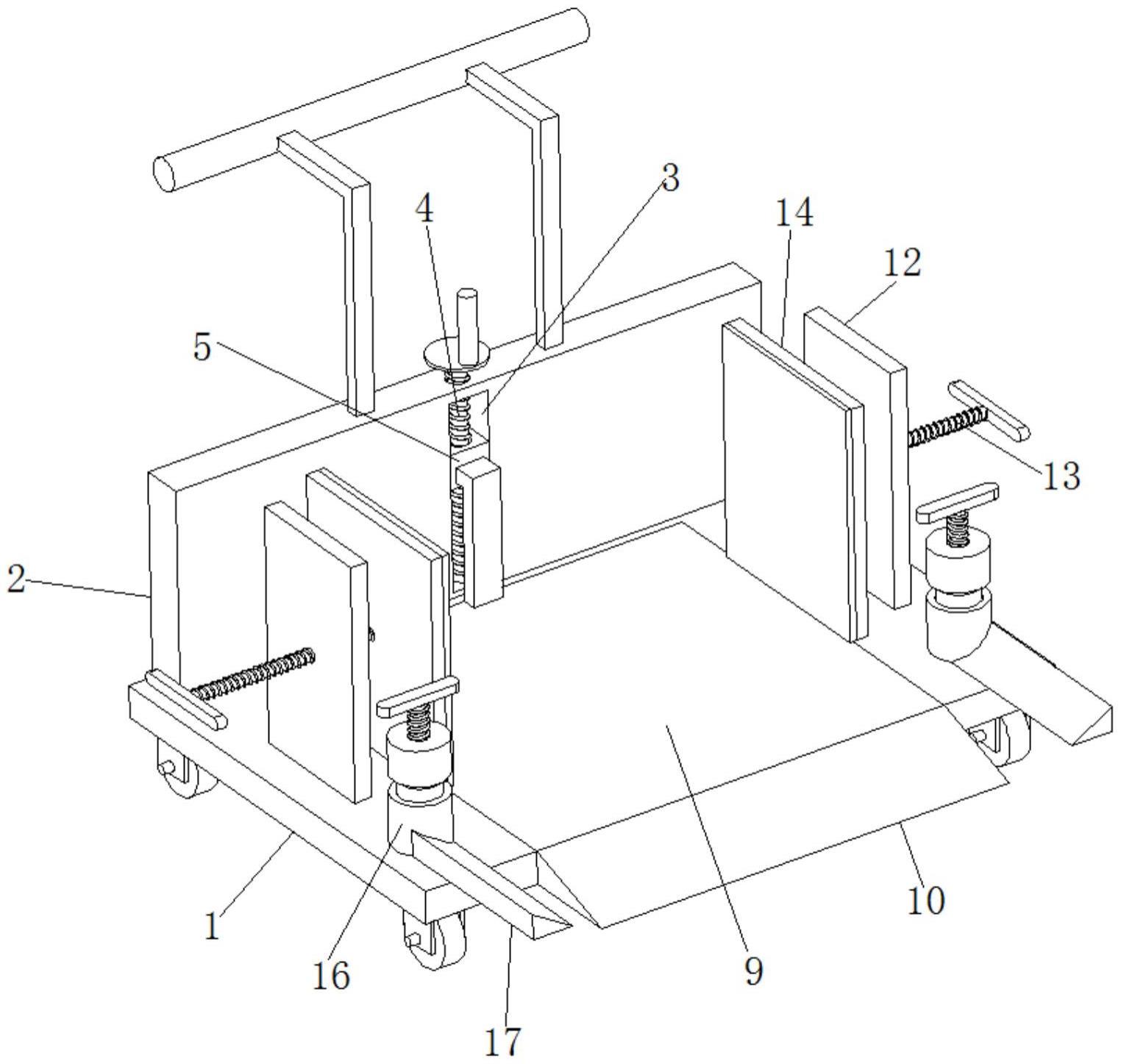
3、一种转运固定结构,包括底部外壁四角均安装有移动轮的底板,所述底板顶部外壁一端安装有挡板,所述挡板一侧外壁开有滑槽,所述挡板顶部外壁通过轴承插接有丝杆,所述丝杆上螺接有滑块,所述滑块一侧外壁固定有承托机构,所述底板顶部外壁两端均安装有夹持机构,所述底板顶部外壁开有固定口,所述固定口两侧内壁均开有限位槽,所述底板顶部外壁两端均固定有卡轮机构。
4、通过上述方案,可将机器人放置在承托机构上,进行转移,可转动丝杆使得滑块在滑槽内壁上或下移动,进而控制承托机构的升降,在放置机器人时,可将承托机构高度降至最低与地面接触,这时可直接将机器人推至承托机构上,之后再将承托机构升起,进行转移,无需人工对机器人进行手动搬运,十分省力,通过设置的移动轮使得底板自身能被推着进行移动,无需再将装置连同上面的机器人再次搬运至推车上,进行移动,十分方便,通过设置的两个夹持机构可从机器人两侧对机器人进行夹持固定,放置机器人在转移的过程中从承托机构上掉落,通过设置的卡轮机构可在机器人移到承托机构上之后,将机器人底部的车轮卡住,进一步提高固定效果。
5、优选的,所述承托机构包括折弯板,固定于折弯板底部外壁的托板,固定于托板一侧外壁的爬坡板,固定于托板两侧外壁的限位板。
6、通过上述方案,转动丝杆使得滑块在滑槽内壁向下滑动,带动折弯板和托板下降,将托板降至地面,机器人可通过爬坡板推至托板上,这时再反向转动丝杆使得滑块在滑槽内壁向上滑动,进而带动折弯板和托板上升,并使得托板顶部与底板顶部齐平。
7、优选的,所述夹持机构包括侧板,螺接于侧板一侧外壁上的螺纹杆,转动连接于螺纹杆一端的夹板。
8、通过上述方案,分别转动两个螺纹杆使得两个夹板相互靠近,对中间的机器人进行夹持固定。
9、优选的,所述卡轮机构包括立柱,套设于立柱外部的转套,固定于转套一侧外壁上的卡板,开设于立柱顶部外壁的螺纹孔,螺接于螺纹孔内壁的螺杆,固定于螺杆外壁的压管。
10、通过上述方案,可将卡板朝托板一端转动90°,使得卡板移至托板上,卡在机器人车辆下方,转动螺杆带动压管。下降压在转套上,对卡板位置进行固定。
11、优选的,所述挡板顶部外壁固定有把手。
12、通过上述方案,方便推动装置进行移动。
13、优选的,所述夹板一侧外壁粘接有防滑垫,所述防滑垫上设有防滑螺纹。
14、通过上述方案,可提高夹持效果。
15、优选的,所述限位板与限位槽相适配。
16、通过上述方案,限位板在随着托板一起上升的过程中,会卡入限位槽内,使得托板不能继续上升,这时托板顶部刚好与底板顶部齐平。
17、本实用新型的有益效果为:
18、1、可将机器人放置在承托机构上,进行转移,可转动丝杆使得滑块在滑槽内壁上或下移动,进而控制承托机构的升降,在放置机器人时,可将承托机构高度降至最低与地面接触,这时可直接将机器人推至承托机构上,之后再将承托机构升起,进行转移,无需人工对机器人进行手动搬运,十分省力,通过设置的移动轮使得底板自身能被推着进行移动,无需再将装置连同上面的机器人再次搬运至推车上,进行移动,十分方便。
19、2、通过设置的两个夹持机构可从机器人两侧对机器人进行夹持固定,放置机器人在转移的过程中从承托机构上掉落,通过设置的卡轮机构可在机器人移到承托机构上之后,将机器人底部的车轮卡住,进一步提高固定效果。
技术特征:
1.一种转运固定结构,包括底部外壁四角均安装有移动轮的底板(1),其特征在于,所述底板(1)顶部外壁一端安装有挡板(2),所述挡板(2)一侧外壁开有滑槽(3),所述挡板(2)顶部外壁通过轴承插接有丝杆(4),所述丝杆(4)上螺接有滑块(5),所述滑块(5)一侧外壁固定有承托机构,所述底板(1)顶部外壁两端均安装有夹持机构,所述底板(1)顶部外壁开有固定口(6),所述固定口(6)两侧内壁均开有限位槽(7),所述底板(1)顶部外壁两端均固定有卡轮机构。
2.根据权利要求1所述的一种转运固定结构,其特征在于,所述承托机构包括折弯板(8),固定于折弯板(8)底部外壁的托板(9),固定于托板(9)一侧外壁的爬坡板(10),固定于托板(9)两侧外壁的限位板(11)。
3.根据权利要求1所述的一种转运固定结构,其特征在于,所述夹持机构包括侧板(12),螺接于侧板(12)一侧外壁上的螺纹杆(13),转动连接于螺纹杆(13)一端的夹板(14)。
4.根据权利要求1所述的一种转运固定结构,其特征在于,所述卡轮机构包括立柱(15),套设于立柱(15)外部的转套(16),固定于转套(16)一侧外壁上的卡板(17),开设于立柱(15)顶部外壁的螺纹孔(18),螺接于螺纹孔(18)内壁的螺杆(19),固定于螺杆(19)外壁的压管(20)。
5.根据权利要求1所述的一种转运固定结构,其特征在于,所述挡板(2)顶部外壁固定有把手。
6.根据权利要求3所述的一种转运固定结构,其特征在于,所述夹板(14)一侧外壁粘接有防滑垫,所述防滑垫上设有防滑螺纹。
7.根据权利要求2所述的一种转运固定结构,其特征在于,所述限位板(11)与限位槽(7)相适配。
技术总结
本技术公开了一种转运固定结构,涉及转运技术领域,针对现有的转运固定装置的转运座过高,在转运时需要将机器人搬运至转运座上,不够省力和自身不具备移动功能,需要将转运座连同上面的机器人再次搬运至推车上,进行移动,较为麻烦的问题,现提出如下方案,包括底部外壁四角均安装有移动轮的底板,所述底板顶部外壁一端安装有挡板,所述挡板一侧外壁开有滑槽。本技术通过设置的可升降的承托机构,方便直接将机器人推至承托机构上进行转移,无需人工搬运,通过设置的夹持机构和卡轮机构可对机器人进行固定,避免机器人在转运过程中掉落,通过设置的移动轮使得底板自身能被推着进行移动,十分方便。
技术研发人员:李密,陈旭,陈佳期,林旭,唐光铁,曾远强,卢雨畋
受保护的技术使用者:福建省海峡智汇科技有限公司
技术研发日:20230306
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!