一种移动机器人的制作方法
本技术涉及轮式机器人,特别是一种移动机器人。
背景技术:
1、在一些高强度、高风险的行业,为了节约人力与物力消耗,保证人员的生命安全,会使用可移动的机器人取代部分有隐患的人工工作;但移动机器人在实际工作中需要面对一些障碍和坡度,这使得移动机器人在实际使用中受到一定的环境限制。
2、为了解决这一问题,市面上出现了一种移动机器人,内置或在其驱动轮上设置弹性件等减震机构,以使移动机器人在越过障碍的过程中保持稳定,以此来实现移动机器人越障能力的提升,然而现有的设计方法不能使移动机器人根据不同的工作环境改变其姿态以跨越障碍物或坡度,这使得移动机器人在实际应用中具有一定的局限性。
技术实现思路
1、本实用新型实施例要解决的技术问题在于,提供一种移动机器人,以解决现有技术中不能主动调节底盘高度以适应不同环境的问题。
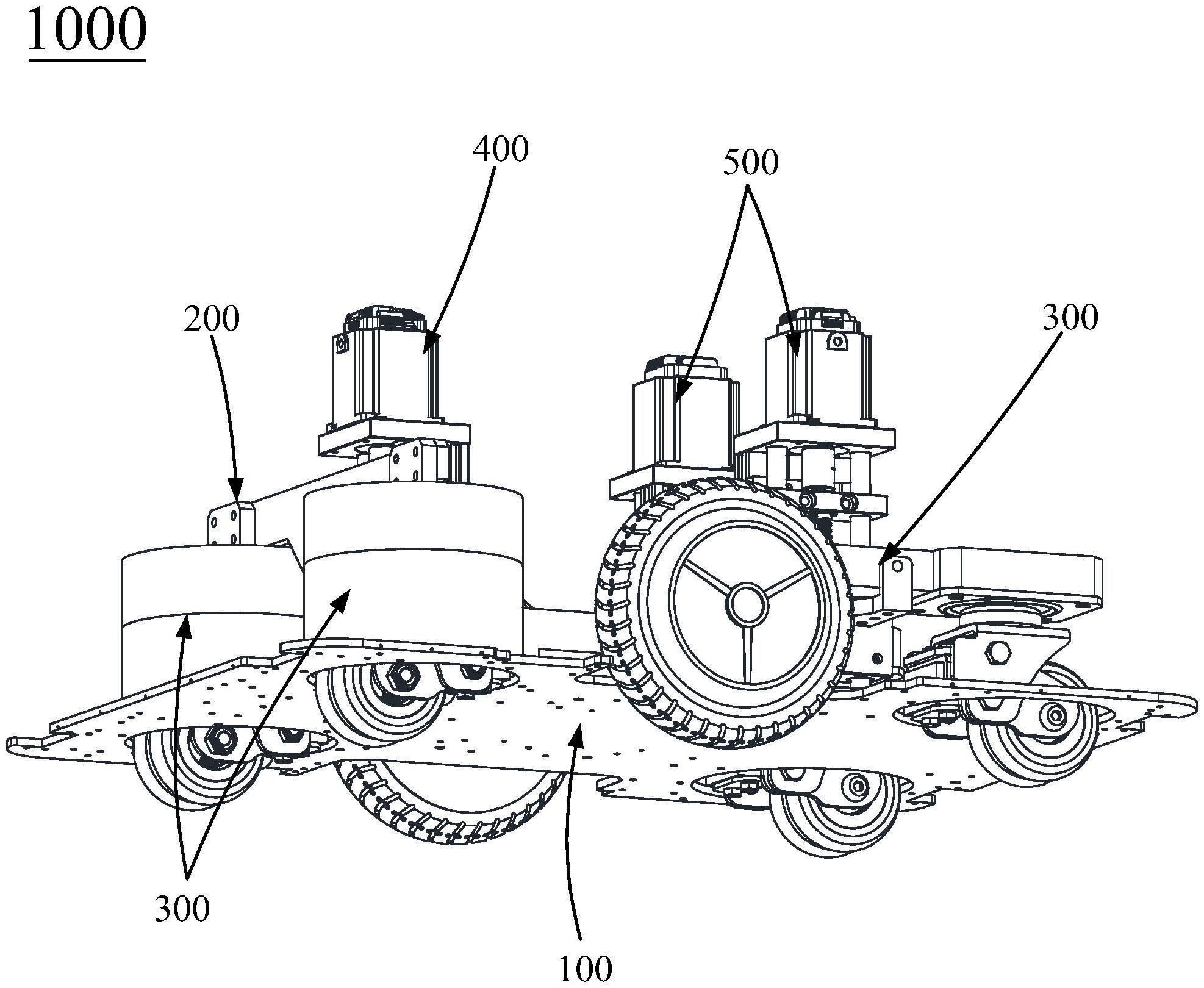
2、本实用新型实施例所提供移动机器人包括:底板、前轮机构、驱动机构、第一举升机构和第二举升机构,所述前轮机构包括多个前轮,和连接所述前轮的支架组件;所述驱动机构设于所述底板相对两侧;所述第一举升机构与所述底板和所述支架组件相连接,所述第二举升机构与所述驱动机构和所述底板连接。
3、进一步地,所述驱动机构包括后轮、驱动轮和悬挂组件,所述后轮与所述驱动轮通过所述悬挂组件相连接,所述第二举升机构通过所述悬挂组件连接所述驱动机构。
4、进一步地,所述悬挂组件包括支撑梁和连接座,所述支撑梁连接所述后轮和所述驱动轮,所述连接座装设于所述支撑梁上,所述第二举升机构与所述连接座连接。
5、进一步地,所述悬挂组件包括:第一连接臂、第二连接臂、连接件、减震器和连接座,第一连接臂与所述驱动轮连接;第二连接臂与所述后轮连接;连接件与所述第一连接臂和所述第二连接臂均转动连接;减震器与所述第一连接臂和所述第二连接臂均转动连接;所述连接座与所述第一连接臂或所述第二连接臂相连接,所述第二举升机构与所述连接座相连接;其中,所述第一连接臂、所述连接件、所述第二连接臂和所述减震器围合形成四边形结构。
6、进一步地,所述悬挂组件包括:减震器、支撑臂、第一连接臂、第二连接臂和连接座,第一连接臂的一端与所述支撑臂的一端转动连接,所述第一连接臂的另一端与所述减震器一端转动连接,所述驱动轮设于所述第一连接臂上;第二连接臂的一端与所述后轮连接,所述第二连接臂的另一端与所述减震器远离所述第一连接臂的一端转动连接,所述第二连接臂与所述支撑臂的另一端相连接;所述连接座设于所述第一连接臂上,所述第二举升机构与所述连接座连接。
7、进一步地,所述支架组件包括固定架和连接架,所述固定架的一端连接于所述前轮,所述固定架的另一端与所述连接架相连接,所述连接架远离所述固定架的一端与所述第一举升机构相连接。
8、进一步地,所述支架组件包括固定架和连接架,所述固定架连接于所述前轮,各所述固定架连接同一所述连接架,所述连接架与所述第一举升机构相连接。
9、进一步地,所述第一举升机构包括设置在所述底板上的第一立架,以及设置在所述第一立架上的第一直线模组,所述第一直线模组包括与所述连接架连接的第一滑块,所述第一滑块与所述连接架相连接。
10、进一步地,所述第二举升机构包括设置在所述底板上的第二立架,以及设置在所述第二立架上的第二直线模组,所述第二直线模组包括与所述连接座连接的第二滑块,所述第二滑块与所述连接座相连接。
11、进一步地,所述固定架上设置有防护罩,所述防护罩罩设在前轮的外圈。
12、与现有技术相比,本实用新型实施例提供的移动机器人的有益效果在于:移动机器人包括:底板、前轮机构、驱动机构、第一举升机构和第二举升机构,前轮机构包括多个前轮,和连接前轮的支架组件;驱动机构设于底板相对两侧;第一举升机构与底板和支架组件相连接,第二举升机构与驱动机构和底板连接;第一举升机构通过连接支架组件与前轮相连接,因第一举升机构本身固定在底板上,第一举升机构通过调节自身以带动底板向上抬升,最终使得底板在前轮处相对于地面的距离产生变化;同理,第二举升机构调节自身时,带动底板在驱动机构处相对于地面的距离产生变化;所以在移动机器人的实际使用中,其能够通过调节第一举升机构与第二举升机构来主动改变移动机器人在面对障碍和坡度时的姿态,以使移动机器人能够面对各种不同的工作环境。
技术特征:
1.一种移动机器人,其特征在于,包括:
2.根据权利要求1所述的移动机器人,其特征在于:所述驱动机构包括后轮、驱动轮和悬挂组件,所述后轮与所述驱动轮通过所述悬挂组件相连接,所述第二举升机构通过所述悬挂组件连接所述驱动机构。
3.根据权利要求2所述的移动机器人,其特征在于:所述悬挂组件包括支撑梁和连接座,所述支撑梁连接所述后轮和所述驱动轮,所述连接座装设于所述支撑梁上,所述第二举升机构与所述连接座连接。
4.根据权利要求2所述的移动机器人,其特征在于,所述悬挂组件包括:
5.根据权利要求2所述的移动机器人,其特征在于,所述悬挂组件包括:
6.根据权利要求1所述的移动机器人,其特征在于:所述支架组件包括固定架和连接架,所述固定架的一端连接于所述前轮,所述固定架的另一端与所述连接架相连接,所述连接架远离所述固定架的一端与所述第一举升机构相连接。
7.根据权利要求1所述的移动机器人,其特征在于:所述支架组件包括固定架和连接架,所述固定架连接于所述前轮,各所述固定架连接同一所述连接架,所述连接架与所述第一举升机构相连接。
8.根据权利要求6或7所述的移动机器人,其特征在于:所述第一举升机构包括设置在所述底板上的第一立架,以及设置在所述第一立架上的第一直线模组,所述第一直线模组包括与所述连接架连接的第一滑块,所述第一滑块与所述连接架相连接。
9.根据权利要求4或5所述的移动机器人,其特征在于:所述第二举升机构包括设置在所述底板上的第二立架,以及设置在所述第二立架上的第二直线模组,所述第二直线模组包括与所述连接座连接的第二滑块,所述第二滑块与所述连接座相连接。
10.根据权利要求6或7所述的移动机器人,其特征在于:所述固定架上设置有防护罩,所述防护罩罩设在前轮的外圈。
技术总结
本技术涉及轮式机器人技术领域,尤其涉及一种移动机器人。移动机器人包括:底板、前轮机构、驱动机构、第一举升机构和第二举升机构,前轮机构包括多个前轮,和连接前轮的支架组件;驱动机构设于底板相对两侧;第一举升机构与底板和支架组件相连接,第二举升机构与驱动机构和底板连接;第一举升机构通过连接支架组件与前轮相连接,因第一举升机构本身固定在底板上,第一举升机构通过调节自身以带动底板在前轮处向上抬升,最终使得底板在前轮处相对于地面的距离产生变化;同理,第二举升机构调节自身时,带动底板在驱动机构处相对于地面的距离产生变化;以解决现有技术中不能主动调节底盘高度以适应不同环境的问题。
技术研发人员:梁凯,吴覃明,王斌
受保护的技术使用者:深圳竹芒科技有限公司
技术研发日:20230407
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!