一种转向轮转向角度实时监测装置的制作方法
本申请涉及车轮转向监测,尤其涉及一种转向轮转向角度实时监测装置。
背景技术:
1、现阶段的扫路机采用液压控制转向,转向油缸伸缩带动转向轮偏转,未对转向轮的实际转向角度进行实时监测,因此扫路机在进行智能化无人清扫作业时,行驶方向偏转后无法监测转向角度,不能及时修正行驶轨迹,无法按指定路线行驶,影响工作效率。
2、因此,如何加强对转向轮转向角度的监测,提高工作效率,成为需要解决的问题。
3、在背景技术中公开的上述信息仅用于加强对本申请的背景的理解,因此其可能包含没有形成为本领域普通技术人员所知晓的现有技术的信息。
技术实现思路
1、本申请提供一种转向轮转向角度实时监测装置,用以解决现有技术存在的问题。
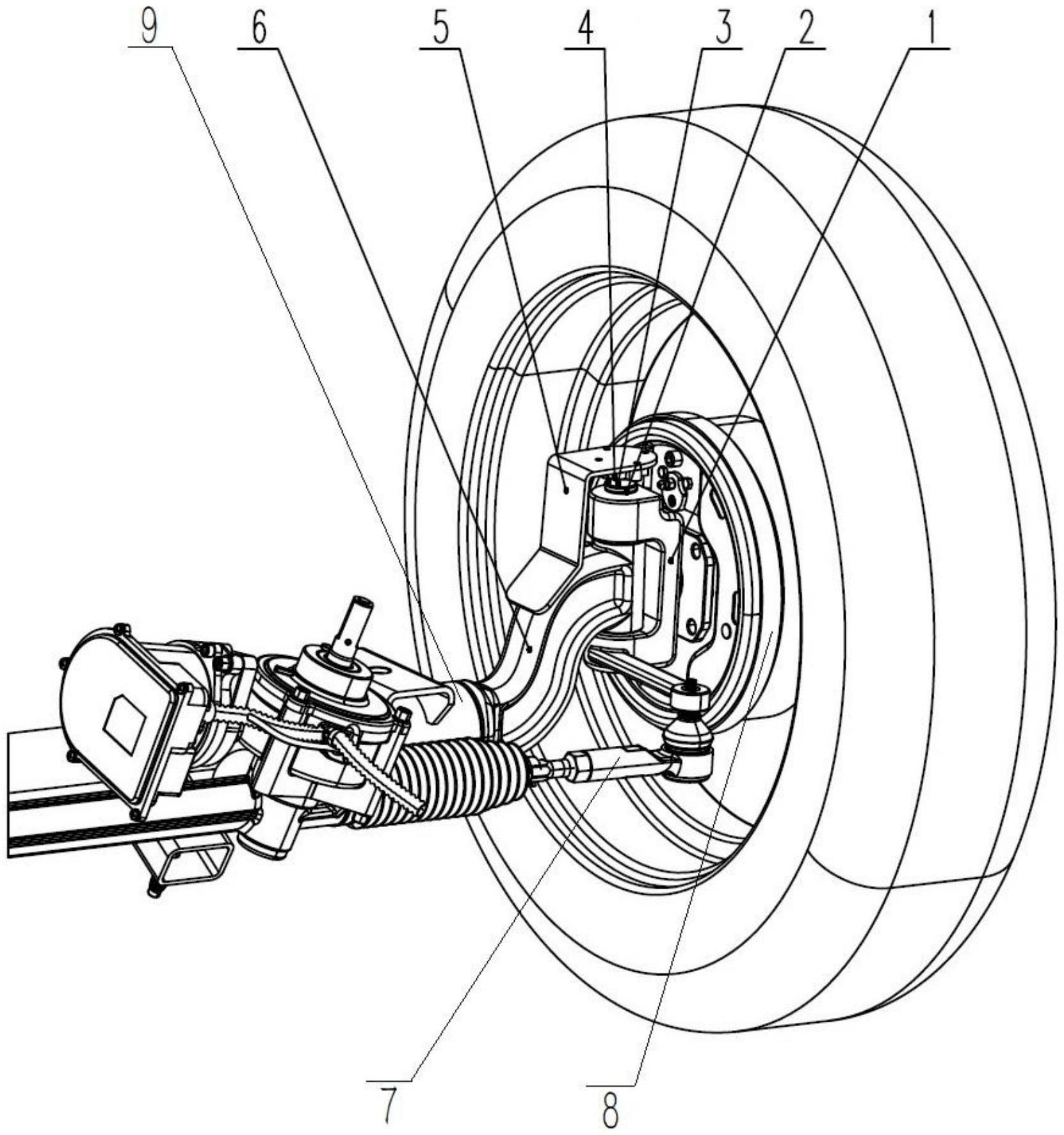
2、本申请提供一种转向轮转向角度实时监测装置,包括:转动组件和固定组件;
3、所述转动组件包括:设于转向轮轮毂一侧的轮毂支撑臂,所述轮毂支撑臂上连接有转向驱动杆;与所述轮毂支撑臂固定连接的转向轴;设于所述转向轴上且与所述转向轴固定连接的角度监测感应片;
4、所述固定组件包括:设于所述角度监测感应片上,且用于监测所述角度监测感应片的转向角度数据的角度监测传感器;设于所述角度监测传感器上的固定安装座;与所述固定安装座连接的支撑横臂,所述支撑横臂的一端设有连接轴,所述支撑横臂的另一端套设于所述转向轴上,且与所述转向轴活动连接。
5、在一些实施例中,所述固定安装座与所述角度监测传感器、所述支撑横臂固定连接。
6、在一些实施例中,所述支撑横臂包括:与所述连接轴连接的连接横臂;与所述连接横臂连接的中空套管,所述中空套管套设于所述转向轴上。
7、在一些实施例中,所述轮毂支撑臂包括:
8、与所述转向轮轮毂固定连接的第一连接块;
9、设于所述第一连接块两端的第二连接块和第三连接块,所述第二连接块、所述第三连接块分别设于所述中空套管的两端,且与所述转向轴固定连接。
10、在一些实施例中,所述角度监测传感器设于所述角度监测感应片的正上方。
11、在一些实施例中,还包括:用于接收所述转向角度数据的控制器,所述控制器与所述角度监测传感器连接。
12、在一些实施例中,所述转向驱动杆的一端设于所述第三连接块上远离所述第一连接块的一侧。
13、在一些实施例中,所述转向驱动杆包括:
14、与所述控制器连接的主驱动杆;
15、与所述主驱动杆连接的连动杆,所述连动杆的另一端与所述轮毂支撑臂连接。
16、本申请提供的转向轮转向角度实时监测装置,包括:转动组件和固定组件;所述转动组件包括:设于转向轮轮毂一侧的轮毂支撑臂,所述轮毂支撑臂上连接有转向驱动杆;与所述轮毂支撑臂固定连接的转向轴;设于所述转向轴上且与所述转向轴固定连接的角度监测感应片;所述固定组件包括:设于所述角度监测感应片上,且用于监测所述角度监测感应片的转向角度数据的角度监测传感器;设于所述角度监测传感器上的固定安装座;与所述固定安装座连接的支撑横臂,所述支撑横臂的一端设有连接轴,所述支撑横臂的另一端套设于所述转向轴上,且与所述转向轴活动连接。本申请涉及的转向轮转向角度实时监测装置,通过设置角度监测感应片和角度监测传感器,将角度监测感应片设置为随转向轴转动而转动,将角度监测传感器固定设置于角度监测感应片上方,实现对转向轮转向角度的实时监测,以便于及时修正行驶方向,保证无人清扫作业时扫路机按指定行驶轨迹行驶,提高工作效率。
技术特征:
1.一种转向轮转向角度实时监测装置,其特征在于,包括:转动组件和固定组件;
2.根据权利要求1所述的转向轮转向角度实时监测装置,其特征在于,所述固定安装座与所述角度监测传感器、所述支撑横臂固定连接。
3.根据权利要求1或2所述的转向轮转向角度实时监测装置,其特征在于,所述支撑横臂包括:与所述连接轴连接的连接横臂;与所述连接横臂连接的中空套管,所述中空套管套设于所述转向轴上。
4.根据权利要求3所述的转向轮转向角度实时监测装置,其特征在于,所述轮毂支撑臂包括:
5.根据权利要求1所述的转向轮转向角度实时监测装置,其特征在于,所述角度监测传感器设于所述角度监测感应片的正上方。
6.根据权利要求1所述的转向轮转向角度实时监测装置,其特征在于,还包括:用于接收所述转向角度数据的控制器,所述控制器与所述角度监测传感器连接。
7.根据权利要求4所述的转向轮转向角度实时监测装置,其特征在于,所述转向驱动杆的一端设于所述第三连接块上远离所述第一连接块的一侧。
8.根据权利要求6所述的转向轮转向角度实时监测装置,其特征在于,所述转向驱动杆包括:
技术总结
本申请提供一种转向轮转向角度实时监测装置,包括:转动组件和固定组件;转动组件包括:设于转向轮轮毂一侧的轮毂支撑臂;与轮毂支撑臂固定连接的转向轴;设于转向轴上的角度监测感应片;固定组件包括:设于角度监测感应片上的转向角度数据的角度监测传感器;设于角度监测传感器上的固定安装座;与固定安装座连接的支撑横臂,支撑横臂的一端设有连接轴。本申请通过设置角度监测感应片和角度监测传感器,将角度监测感应片设置为随转向轴转动而转动,将角度监测传感器固定设置于角度监测感应片上方,实现对转向轮转向角度的实时监测,以便于及时修正行驶方向,保证无人清扫作业时扫路机按指定行驶轨迹行驶,提高工作效率。
技术研发人员:吴宇健,邓剑华,黄耀斌
受保护的技术使用者:四会市环创市政工程有限公司
技术研发日:20230418
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!