多足机器人的制作方法
本技术涉及智能产品领域,具体而言,涉及一种多足机器人。
背景技术:
1、众所周知,腿式机器人如人形机器人或者多足机器人的旋转关节多采用谐波减速装置,如专利wo2014/156118所述,请结合图1,柔轮19和柔轮21通过柔性轴承27的变形作用分别与刚性内齿轮7和刚性内齿轮15产生啮合,并在啮合过程中产生啮合齿形变形的现象,刚性内齿轮7和刚性内齿轮15分别通过基部5和基部13承载。近年来,随着腿式机器人旋转关节对传递大扭矩的需求逐渐强烈,然而专利wo2014/156118所述的谐波减速装置却由于柔轮为弹性齿轮受材料弹性极限的限制不能传递较大的扭矩。现有的多级行星减速机构构成的减速装置虽然能够传递大扭矩,但是体积大,占用空间大。
技术实现思路
1、本实用新型的目的在于提供一种多足机器人,其不仅能够提供大减速比和大扭矩,同时体积小,占用的空间小,便于安装。
2、本实用新型的实施例是这样实现的:
3、第一方面,本实用新型提供一种多足机器人,包括:
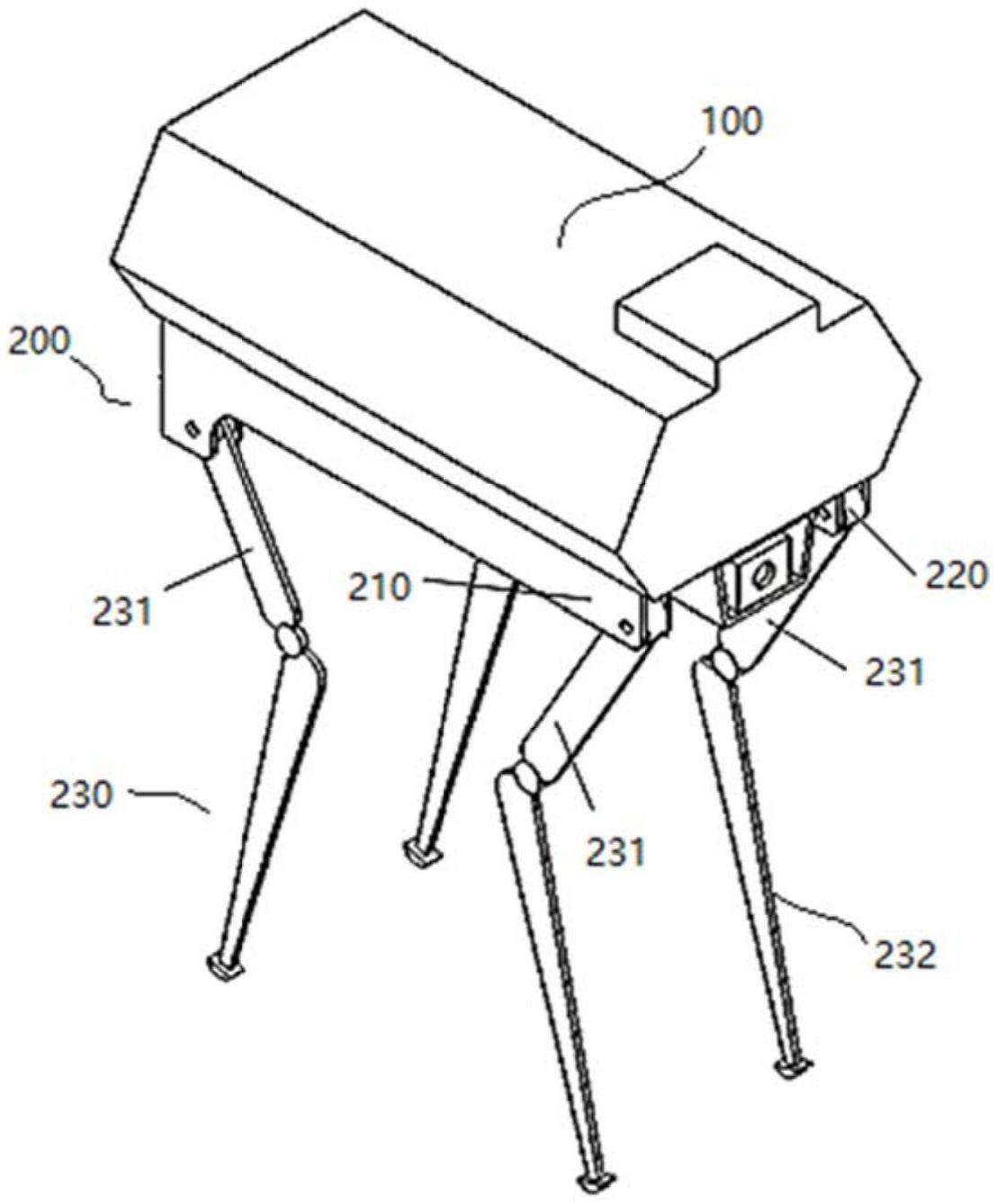
4、机体和行走装置,所述行走装置包括机架、传动机构和旋转臂,所述机架与所述机体连接,所述旋转臂与所述机架可转动地连接;所述传动机构包括电机、行星减速组件和摆线针轮减速组件,所述电机安装于所述机架上,所述电机与所述行星减速组件传动连接,所述行星减速组件与所述摆线针轮减速组件传动连接,所述摆线针轮减速组件与所述旋转臂连接,用于带动所述旋转臂转动。
5、在可选的实施方式中,所述行星减速组件包括壳体、内齿圈、输入齿轮、行星齿轮和输出行星架,所述壳体与所述机架连接,所述内齿圈安装于所述壳体内,所述输入齿轮与所述壳体可转动地连接,所述行星齿轮与所述输出行星架可转动地连接,所述行星齿轮同时与所述输入齿轮和所述内齿圈啮合;所述输出行星架与所述摆线针轮减速组件连接,所述电机的输出转轴与所述输入齿轮连接。
6、在可选的实施方式中,所述壳体包括相连的电机法兰和联结法兰,所述电机的壳体与所述电机法兰固定连接,所述内齿圈与所述联结法兰或所述电机法兰固定连接。
7、在可选的实施方式中,所述输入齿轮和所述行星齿轮均设置为锥形齿轮;所述行星减速组件还包括轴向调节结构,所述轴向调节结构安装于所述输出行星架上,所述轴向调节结构用于调节所述行星齿轮在所述输入齿轮的轴向上的位置,以调整所述行星齿轮和所述输入齿轮的啮合间隙。
8、在可选的实施方式中,所述轴向调节结构包括调节杆,所述输出行星架上设置有螺纹孔,所述调节杆与所述螺纹孔螺纹连接,所述调节杆的端部能与所述行星齿轮的端面抵接,以调节所述行星齿轮相对于所述输入齿轮的位置。
9、在可选的实施方式中,所述调节杆的数量为多个,多个所述调节杆围绕对应的所述行星齿轮的轴线间隔排布。
10、在可选的实施方式中,所述摆线针齿减速组件包括针齿壳、曲柄轴、两个摆动齿轮、多个针齿、多个传动销、支撑法兰和输出轴;所述针齿壳与所述壳体连接,所述曲柄轴包括两个彼此相差180°相位的偏心圆柱段和两个同心圆柱段,两个所述偏心圆柱段位于两个同心圆柱段之间,所述两个同心圆柱段分别与所述支撑法兰和所述输出轴可转动地连接,所述两个摆动齿轮分别套接于两个偏心圆柱段外,所述支撑法兰与输出轴均与所述针齿壳可转动地连接;所述多个针齿均安装在所述针齿壳内且周向排布,所述多个针齿均位于两个摆动齿轮的外侧;每个所述摆动齿轮均设置有周向排布的多个齿孔,所述多个传动销在所述曲柄轴的周向上间隔排布,每个所述传动销穿设于两个摆动齿轮对应的齿孔内且与所述支撑法兰和输出轴固定连接;
11、所述输出行星架与所述曲柄轴固定连接。
12、在可选的实施方式中,所述偏心圆柱段与所述摆动齿轮通过滚针轴承可转动地连接,所述曲柄轴上设置有限制所述滚针轴承轴向位移的轴向垫圈。
13、在可选的实施方式中,所述输出轴的远离所述支撑法兰的端面设置有沉孔,所述传动销插接于所述沉孔内,且所述传动销的端部不凸出所述沉孔的远离所述支撑法兰的一端。
14、在可选的实施方式中,所述多足机器人还包括均安装于机体上的电池、控制模块和导航模块,所述控制模块与所述导航模块均与所述电池电连接,所述导航模块和行走装置均与所述控制模块通信连接。
15、本实用新型实施例的有益效果是:
16、综上所述,本实施例提供的多足机器人,在机体上安装有行走装置,行走装置包括机架和安装在机架上的旋转臂,旋转臂通过设置于机架上的传动机构驱动,旋转臂具备正常行走功能以及具备跨越障碍物的功能。同时,行走机构为行星减速组件和摆线针轮减速组件配合的两级减速机构,既满足了大减速比和大扭矩的动力传递,使得旋转臂能够平稳地跨越大障碍物,并且,融合摆线针轮减速机的结构紧凑、体积小的优势,使得传动机构整体的体积小,占用的空间小,对于装配空间的要求小,因此,机体上不需要预留较大的空间来装配传动机构,机体的体积小,机器人能够在空间狭小的环境下作用。
技术特征:
1.一种多足机器人,其特征在于,包括:
2.根据权利要求1所述的多足机器人,其特征在于:
3.根据权利要求2所述的多足机器人,其特征在于:
4.根据权利要求2所述的多足机器人,其特征在于:
5.根据权利要求4所述的多足机器人,其特征在于:
6.根据权利要求5所述的多足机器人,其特征在于:
7.根据权利要求2-6中任一项所述的多足机器人,其特征在于:
8.根据权利要求7所述的多足机器人,其特征在于:
9.根据权利要求7所述的多足机器人,其特征在于:
10.根据权利要求1所述的多足机器人,其特征在于:
技术总结
本申请提供一种多足机器人,涉及智能产品领域,包括机体和行走装置,行走装置包括机架、传动机构和旋转臂,机架与机体连接,旋转臂与机架可转动地连接;传动机构包括电机(图未示)、行星减速组件和摆线针轮减速组件,电机安装于机架上,电机与行星减速组件传动连接,行星减速组件与摆线针轮减速组件传动连接,摆线针轮减速组件与旋转臂连接,用于带动旋转臂转动。该多足机器人的传动机构采用行星减速组件和摆线针轮减速组件配合,实现多级减速,在满足大减速比和大扭矩传递的前提下,整体结构体积小,占用的空间小。
技术研发人员:陈玉山,刘晓飞,张楠楠,谭利彬
受保护的技术使用者:南京南传智能技术有限公司
技术研发日:20230506
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!