一种履足复合式六足机器人
本技术涉及机器人,具体地,涉及一种履足复合式六足机器人。
背景技术:
1、目前常见的六足机器人的运动形式有履式、足式和轮式等形式。足式机器人的越障能力强,机动性高,在崎岖地形上有较高的适应性和移动效率。履带式机器人运动速度迅速、平稳,结构和控制也较简单,在相对平坦的地形上行驶时有很大优势。但在实际复杂的应用环境如行星表面、矿井和防灾等的救援中,地形起伏不定且地形形态变化难以预测。在这种情况下,单一运动形式的应用会受到限制,导致足式机器人和履带式机器人较难满足作业需求。
2、公开号为cn113306352a的专利文献公开了一种多地形适应的水陆两栖六足带腰多功能机器人,涉及机器人技术领域,包括机体平台和6条腿足;所述机体平台包括前段机体平台、中段机体平台及后段机体平台,前段机体平台和中段机体平台之间、中段机体平台和后段机体平台之间均采用万向节铰链连接;所述6条腿足包括设于前段机体平台的两条腿足、中段机体平台的两条腿足和后段机体平台的两条腿足;所述6条腿足的部分或全部腿足具有两种或两种以上的可切换结构,从而根据地形切换不同的腿足结构以实现相应运动模式。但是该专利文献的腿部结构只能进行足式行走,运动速度较慢,同时足式机构一定程度上存在负载能力较差的缺陷,使得在救援等复杂作业中的净作业时间被压缩以及物资转运能力受限。
3、公开号为cn108482503a的专利文献公开了一种磁吸轮履式爬壁机器人越障机构,属于爬壁机器人技术领域,包括水平平行前后放置的永磁体轮车架,永磁体轮车架的两侧分别水平固定设置有履带车架;调高电机及永磁体轮驱动轮驱动电机座关于永磁体轮车架中部对称分布且分别固定在左右履带车架的内侧;履带驱动轮减速器的输入轴与履带驱动轮驱动电机的输出轴通过法兰用螺栓连接;履带驱动轮驱动电机座两端分别固定在左右履带车架的内侧,履带式和轮式运动机构结合起来,在导磁壁面及壁面上的障碍物上行走时,互相配合运动。但是该专利文献的履式机构灵活性提高是依赖于于磁性条件,非磁条件依旧受限制,不具有一般性,相比于足式机构,在机动性上仍有差距。同时履式机构运动过程中与地形接触面积较大,面对复杂壁面或较小支撑面时单一的履式机构可能存在打滑或重心不稳等影响工作进程的风险。
4、公开号为cn114475831a的专利文献公开了一种足履式多模态仿生机器人,涉及仿生机器人技术领域,包括腿足单元、跳跃单元和底盘单元,其中,腿足单元包括第一驱动器、驱动杆、大腿杆件、小腿连杆以及被动轮,腿足单元的数量为两组,两组腿足单元平行设置;跳跃单元包括第二驱动器、跳跃小腿、储能弹性件以及套筒,底盘单元包括机架和履带组件,腿足单元、跳跃单元以及履带组件均分别与机架相连,履带组件包括履带和至少两个履带轮。通过将机器人履带底盘与仿生腿足机构及弹性跳跃机构相结合,实现了垂直管道爬行及多角度跳跃,提高了仿生机器人的适应性。但是该专利文献所含腿足较少且以履式运动模态为主,跳跃高度及越障角度受限且难以在转换为足式时保持平衡,对环境的适应性仍较弱,在遇到较复杂崎岖地形时移动效率将下降,越障能力减弱。
技术实现思路
1、本实用新型公开了一种自转换履足式六足机器人,其解决了现有六足机器人在平坦与崎岖地形交替出现的复杂地形条件下不易行走且能耗过大的缺陷,履足复合式机器人结合了履式和足式两种机器人的优点,可以根据地形的起伏情况进行足式和履式两种运动模式的切换,使得其达到能在多种地形都发挥较大优势的目的。
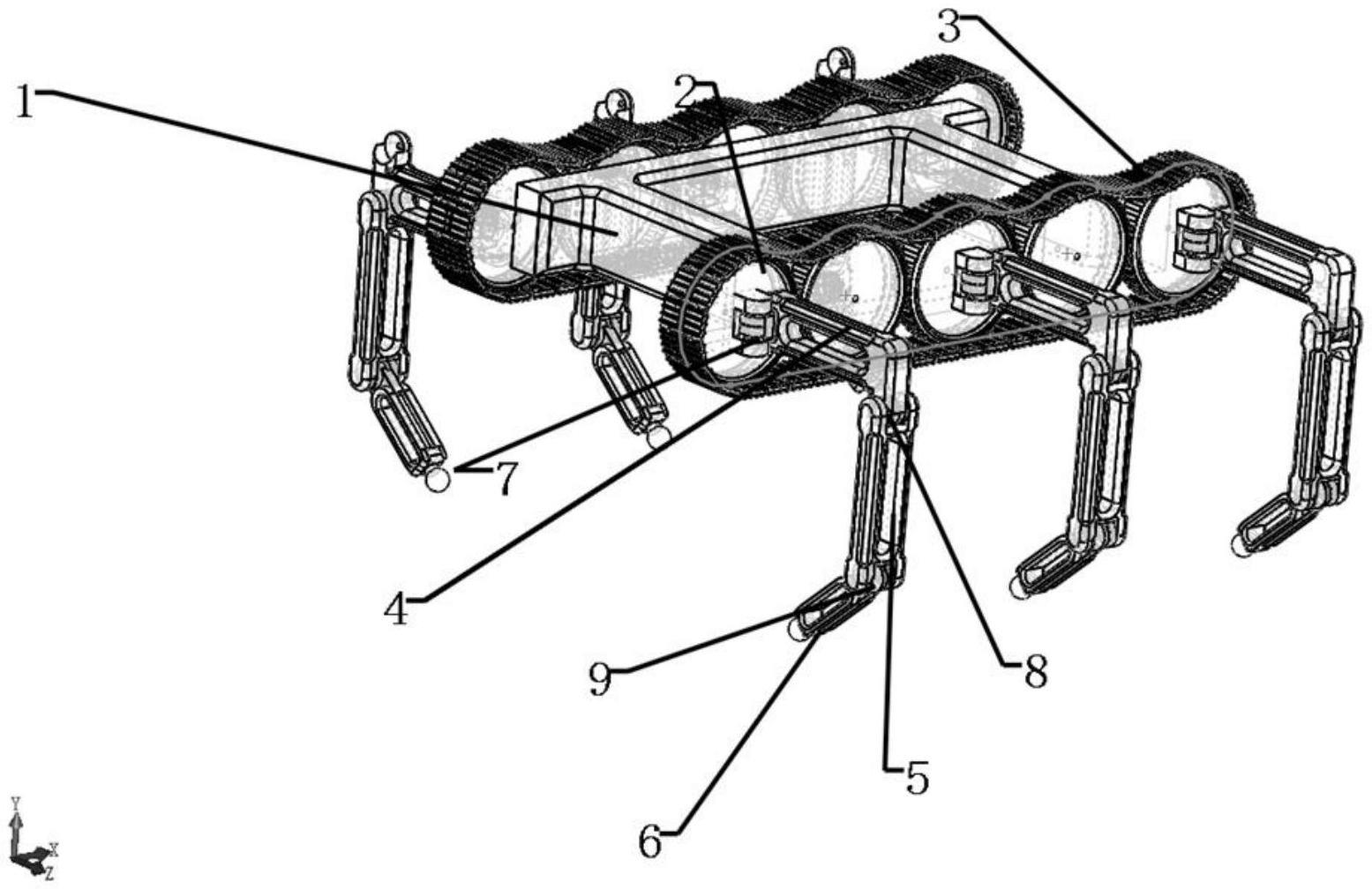
2、为了实现本发明目的,本实用新型提供的一种履足复合式六足机器人,包括主体、设置在主体两侧的履带轮和履带、视觉模块、单片机和六个对称设置在主体两侧机械足,
3、视觉模块与单片机连接以将识别到的地形起伏角度传递给单片机;
4、每个机械足均包括固定在主体上的第一电机、与第一电机输出轴连接的基节、固定在基节上的第二电机、与第二电机输出轴连接的胫节、固定在胫节上的第三电机和与第三电机输出轴连接的腿节,第一电机、第二电机和第三电机均与单片机的输出端连接,单片机用于驱动各电机以实现机器人在六足前进模式和履带前进模式之间的转换。
5、电机用于为机械腿提供动力,使得机械腿在仿生六足式行走时按照指令运动。履带式模式下,机械腿收回到主体两侧,使得履带着地,通过履带轮驱动履带前进。当识别到地形起伏角度超过预设值等工况时,电机将对应信号装换为输出角度,控制机械足程蜷缩式收回状态。
6、进一步地,所述基节一端与连接基节与主体的第一电机输出轴固连,连接腿节与基节的第二电机与所述基节固连,胫节一端与连接胫节与基节的第二电机的输出轴固连,连接胫节与腿节的第三电机与所述胫节一端固连。
7、进一步地,六条机械足并排等间距地设置在所述履带轮上
8、进一步地,主体的两侧分别设置个机械足,同侧的机械足等间距排布。
9、进一步地,基节为镂空设计。
10、进一步地,基节的截面形状为矩形。
11、进一步地,所述腿节的足尖为实心球体。
12、进一步地,还包括锁定机构,所述锁定机构设置在主体上,用于锁定机械足。
13、进一步地,主体的两侧均分别设置有个所述履带轮,每侧的履带轮与相应的履带传动连接。履带轮和履带并排对称排列在所述主体两侧。
14、进一步地,视觉模块采用openmv。
15、进一步地,视觉模块识别到前行路径上的地形起伏角度低于设定的预设值时,单片机控制各第一电机朝同一方向旋转直至各基节统一朝向六足机器人的后方,各第二电机将会朝同一方向旋转且方向第一电机旋转方向相反,带动机械足的腿节直至其旋转至与基节合拢,从六足前进模式切换到履带前进模式。
16、进一步地,当视觉模块识别到前行路径上的地形起伏角度超过设定的预设值时,单片机控制各电机工作,从履带前进模式切换至六足前进模式。
17、进一步地,主体1上可以搭载超声波感应,激光传感器等传感元件、openmv以及舵机驱动板等现有的运算控制元件、电源、电路以及其他机械装置。
18、进一步地,主体1两侧安装5个同等大小相同间隙的履带轮。履带轮上安装有履带。
19、进一步地,在两侧第1、3、5个履带轮上安装有机械足的基节。基节通过轴承直接与主体相连,使得基节与履带轮的运动相互独立,且第一电机可以控制基节的运动。
20、进一步地,在机械足的基节末端安装有胫节。胫节与基节通过轴承和第二电机相连,使得第二电机可以控制胫节的运动。
21、进一步地,在机械足的胫节末端安装有机械足的腿节。胫节与腿节通过轴承和第三电机相连,使得第三电机可以控制腿节的运动。
22、进一步地,所有的电机都由处于主体的单片机linkit7697(控制,能量由处于主体的电池供给。
23、与现有技术相比,本实用新型的有益效果是:
24、1、基于现有六足机器人的主流腿部设计,本实用新型的六足机器人在主体的两侧加装了可以在平坦地势快速前进的履带轮和履带,使得机器人在使用履带前进的模式下相较于足式机器人而言功耗更低,且履带易于替换。在使用仿生六足前进的模式下相较于履带式机器人而言越障能力更优秀,解决了履式机器人不能适应复杂地形的缺陷,同时降低了解决足尖打滑等问题的难度。使其在不同地形下更好地发挥各自模式的优势。
25、2、整个六足机器人产品的各部分尺寸可以自由调节,使得该产品能适应不同工况和不同公司对产品性能的需求。各个部分之间可通过模块化设计,在针对不同的复杂地形需求不同的机器人尺寸时,通过调整各个模块来适应,可以降低生产的成本。
26、3、本实用新型通过加装履带的设计与视觉模块的结合,使得该新型六足机器人可以在2种形态之间自由转换,充分发挥了仿生六足机器人和履带式机器人的长处而规避其短处。拥有极其广泛的应用场景。
- 还没有人留言评论。精彩留言会获得点赞!