移动设备及其双连杆组件的制作方法
本技术涉及移动设备,特别涉及一种移动设备及其双连杆组件。
背景技术:
1、机器人在移动的过程中需要适应各种地形,在高低不平的路径上行驶会移动困难。
2、目前,当机器人的驱动轮撞击地面凸起物(如台阶等物体)后,对驱动轮产生推力,推力迫使多个驱动轮之间的相对结构产生改变,并带动机器人通过特殊路径。
3、但是,这需要地面凸起物与驱动轮产生碰撞,易造成损伤。
技术实现思路
1、有鉴于此,本实用新型提供了一种双连杆组件,以降低造成的损伤。本实用新型还提供了一种具有上述双连杆组件的移动设备。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种双连杆组件,包括:
4、驱动杆;
5、导向杆;
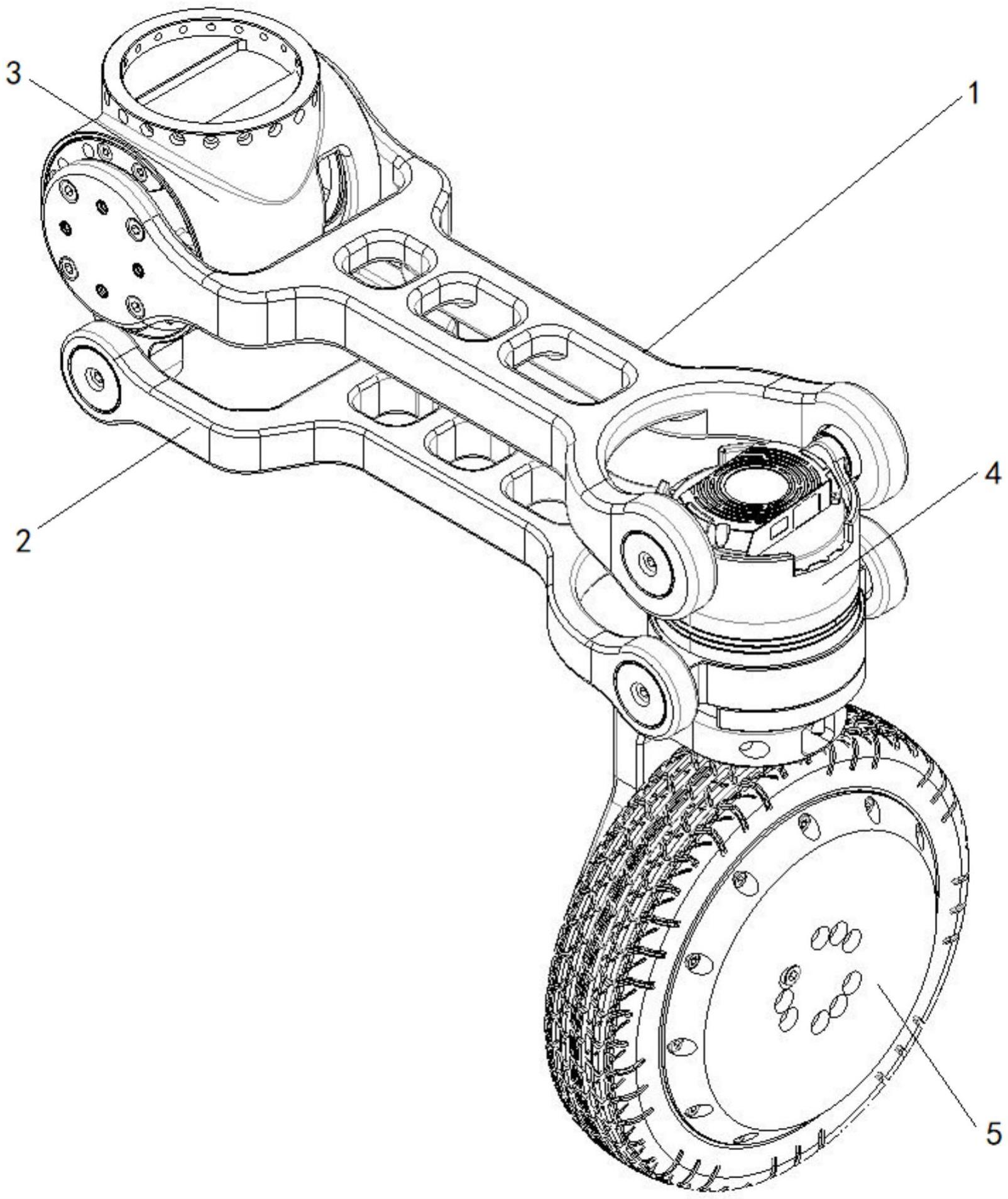
6、第一转向驱动装置,所述第一转向驱动装置包括驱动外壳及相对于所述驱动外壳转动的第一驱动轴;所述驱动杆的一端与所述第一驱动轴连接,所述导向杆的一端与所述驱动外壳转动连接,所述第一驱动轴的轴线与所述导向杆一端的转动轴线平行;
7、用于与驱动轮连接的滚轮连接件,所述驱动杆的另一端转动连接于所述滚轮连接件的第一位置,所述导向杆的另一端转动连接于所述滚轮连接件的第二位置,所述驱动杆另一端的转动轴线与所述导向杆另一端的转动轴线及所述第一驱动轴的轴线平行。
8、可选地,上述双连杆组件中,所述滚轮连接件为驱动所述驱动轮转向的驱动轮转向驱动装置。
9、可选地,上述双连杆组件中,所述第一驱动轴的轴线与所述导向杆一端的转动轴线之间具有第一间距;所述第一位置与所述第二位置之间具有第二间距;
10、所述驱动杆一端的转动轴线与所述驱动杆另一端的转动轴线之间的间距为第三间距,所述导向杆一端的转动轴线与所述导向杆另一端的转动轴线之间的间距为第四间距;
11、所述第一间距与所述第二间距相等,所述第三间距与所述第四间距相等。
12、可选地,上述双连杆组件中,所述驱动杆的一端具有相互对称的两个第一连接部,两个所述第一连接部分别与所述第一驱动轴的两端连接;
13、和/或,所述驱动杆的另一端具有相互对称的两个第二连接部,两个所述第二连接部分别与所述滚轮连接件转动连接;
14、和/或,所述导向杆的一端具有相互对称的两个第三连接部,两个所述第三连接部分别与所述驱动外壳转动连接;
15、和/或,所述导向杆的另一端具有相互对称的两个第四连接部,两个所述第四连接部分别与所述滚轮连接件转动连接。
16、可选地,上述双连杆组件中,所述驱动杆的两个所述第一连接部之间具有第一弧形连接面,所述第一弧形连接面向远离所述第一转向驱动装置的方向凹陷;
17、和/或,所述驱动杆的两个所述第二连接部之间具有第二弧形连接面,所述第二弧形连接面向远离所述滚轮连接件的方向凹陷;
18、和/或,所述导向杆的两个所述第三连接部之间具有第三弧形连接面,所述第三弧形连接面向远离所述第一转向驱动装置的方向凹陷;
19、和/或,所述导向杆的两个所述第四连接部之间具有第四弧形连接面,所述第四弧形连接面向远离所述滚轮连接件的方向凹陷。
20、可选地,上述双连杆组件中,连杆上设置有镂空结构,所述连杆为所述驱动杆和/或所述导向杆。
21、可选地,上述双连杆组件中,所述镂空结构包括沿所述连杆的延伸方向设置的多个通孔。
22、可选地,上述双连杆组件中,多个所述通孔的尺寸相同;沿所述第一转向驱动装置到所述滚轮连接件的方向,所述通孔的间距减小;
23、或,多个所述通孔的尺寸不相同;沿所述第一转向驱动装置到所述滚轮连接件的方向,所述通孔的尺寸增大。
24、本实用新型还提供了一种移动设备,包括驱动轮及移动主体,还包括如上述任一项所述的双连杆组件;
25、所述双连杆组件的第一转向驱动装置与所述移动主体连接,所述滚轮连接件与所述驱动轮连接。
26、可选地,上述移动设备中,所述滚轮连接件为驱动所述驱动轮转向的驱动轮转向驱动装置;
27、所述第一转向驱动装置的第一驱动轴与所述驱动轮转向驱动装置的驱动轴的轴线垂直。
28、可选地,上述移动设备中,所述导向杆位于所述驱动杆的下方;
29、所述驱动外壳朝下的一侧设置有与所述导向杆转动连接的连接部;
30、所述滚轮连接件的第一位置位于所述滚轮连接件的第二位置背向所述驱动轮的一侧。
31、可选地,上述移动设备中,所述第一转向驱动装置的第一驱动轴的轴线沿所述移动设备的水平方向设置;
32、所述移动设备还包括减振执行器,所述减振执行器与所述第一转向驱动装置通信连接;
33、在所述驱动轮受到向上的力时,所述减振执行器驱动所述第一转向驱动装置带动所述第一驱动轴转动,使得所述驱动轮抬升;
34、在所述驱动轮悬空时,所述减振执行器驱动所述第一转向驱动装置带动所述第一驱动轴转动,使得所述驱动轮下降。
35、从上述的技术方案可以看出,本实用新型提供的双连杆组件,第一驱动轴的轴线与导向杆一端的转动轴线平行,驱动杆另一端的转动轴线与导向杆另一端的转动轴线及第一驱动轴的轴线平行,使得驱动杆、导向杆、驱动外壳及滚轮连接件形成四连杆结构,使得第一转向驱动装置能够带动驱动杆转动,进而实现对滚轮连接件的升降调节,进而带动驱动轮升降操作,有效降低了地面凸起物与驱动轮产生碰撞的几率,降低造成的损伤,进而提高了双连杆组件的使用寿命。
36、并且,由于第一转向驱动装置的第一驱动轴与驱动杆的一端连接,使得第一驱动轴直接带动驱动杆。即,第一驱动轴相对于驱动外壳转动的角度即为驱动杆的转动角度,进而通过驱动杆的转动直接带动驱动轮升降操作。通过上述设置,避免了第一转向驱动装置的第一驱动轴的转动角度与驱动杆的转动角度之间的换算,也降低了采用其他传动装置间接连接第一驱动轴与驱动杆而产生的加工误差等因素对转动角度的影响,有效提高了控制驱动杆转动角度的精确度,进而提高了驱动轮升降操作的精确度。
37、本实用新型提供的移动设备具有上述双连杆组件。由于上述双连杆组件具有上述技术效果,具有上述双连杆组件的移动设备也应具有同样地技术效果,在此不再一一累述且均在保护范围之内。
技术特征:
1.一种双连杆组件,其特征在于,包括:
2.如权利要求1所述的双连杆组件,其特征在于,所述滚轮连接件为驱动所述驱动轮转向的驱动轮转向驱动装置。
3.如权利要求1所述的双连杆组件,其特征在于,所述第一驱动轴的轴线与所述导向杆一端的转动轴线之间具有第一间距;所述第一位置与所述第二位置之间具有第二间距;
4.如权利要求1所述的双连杆组件,其特征在于,所述驱动杆的一端具有相互对称的两个第一连接部,两个所述第一连接部分别与所述第一驱动轴的两端连接;
5.如权利要求4所述的双连杆组件,其特征在于,所述驱动杆的两个所述第一连接部之间具有第一弧形连接面,所述第一弧形连接面向远离所述第一转向驱动装置的方向凹陷;
6.如权利要求1所述的双连杆组件,其特征在于,连杆上设置有镂空结构,所述连杆为所述驱动杆和/或所述导向杆;
7.如权利要求6所述的双连杆组件,其特征在于,多个所述通孔的尺寸相同;沿所述第一转向驱动装置到所述滚轮连接件的方向,所述通孔的间距减小;
8.一种移动设备,包括驱动轮及移动主体,其特征在于,还包括如权利要求1-7任一项所述的双连杆组件;
9.如权利要求8所述的移动设备,其特征在于,所述滚轮连接件为驱动所述驱动轮转向的驱动轮转向驱动装置;
10.如权利要求9所述的移动设备,其特征在于,所述导向杆位于所述驱动杆的下方;
11.如权利要求8-10任一项所述的移动设备,其特征在于,所述第一转向驱动装置的第一驱动轴的轴线沿所述移动设备的水平方向设置;
技术总结
本技术公开了一种移动设备及其双连杆组件,双连杆组件包括:驱动杆;导向杆;第一转向驱动装置,所述第一转向驱动装置包括驱动外壳及相对于所述驱动外壳转动的第一驱动轴;所述驱动杆的一端与所述第一驱动轴连接,所述导向杆的一端与所述驱动外壳转动连接,所述第一驱动轴的轴线与所述导向杆一端的转动轴线平行;用于与驱动轮连接的滚轮连接件,所述驱动杆的另一端转动连接于所述滚轮连接件的第一位置,所述导向杆的另一端转动连接于所述滚轮连接件的第二位置,所述驱动杆另一端的转动轴线与所述导向杆另一端的转动轴线及所述第一驱动轴的轴线平行。
技术研发人员:顾捷
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:20230524
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!