双舵轮全向AGV底盘结构的制作方法
本技术涉及一种双舵轮全向agv底盘结构。
背景技术:
1、现有的双舵轮移动机器人(agv)的底盘结构,结构简单,采用整体式底盘,将用于控制机器人的元器件集中安装在底盘上方,并将舵轮的驱动组件也安装在底盘上方,底盘整体承受的重量集中,容易导致底盘变形,安装性交底。同时将多种元器件和驱动组件都安装在底盘上方,安装布局混乱,不便于拆装维修,且不同的元器件之间也容易造成电性干扰。
技术实现思路
1、本实用新型提供了一种双舵轮全向agv底盘结构解决上述提到的技术问题,具体采用如下的技术方案:
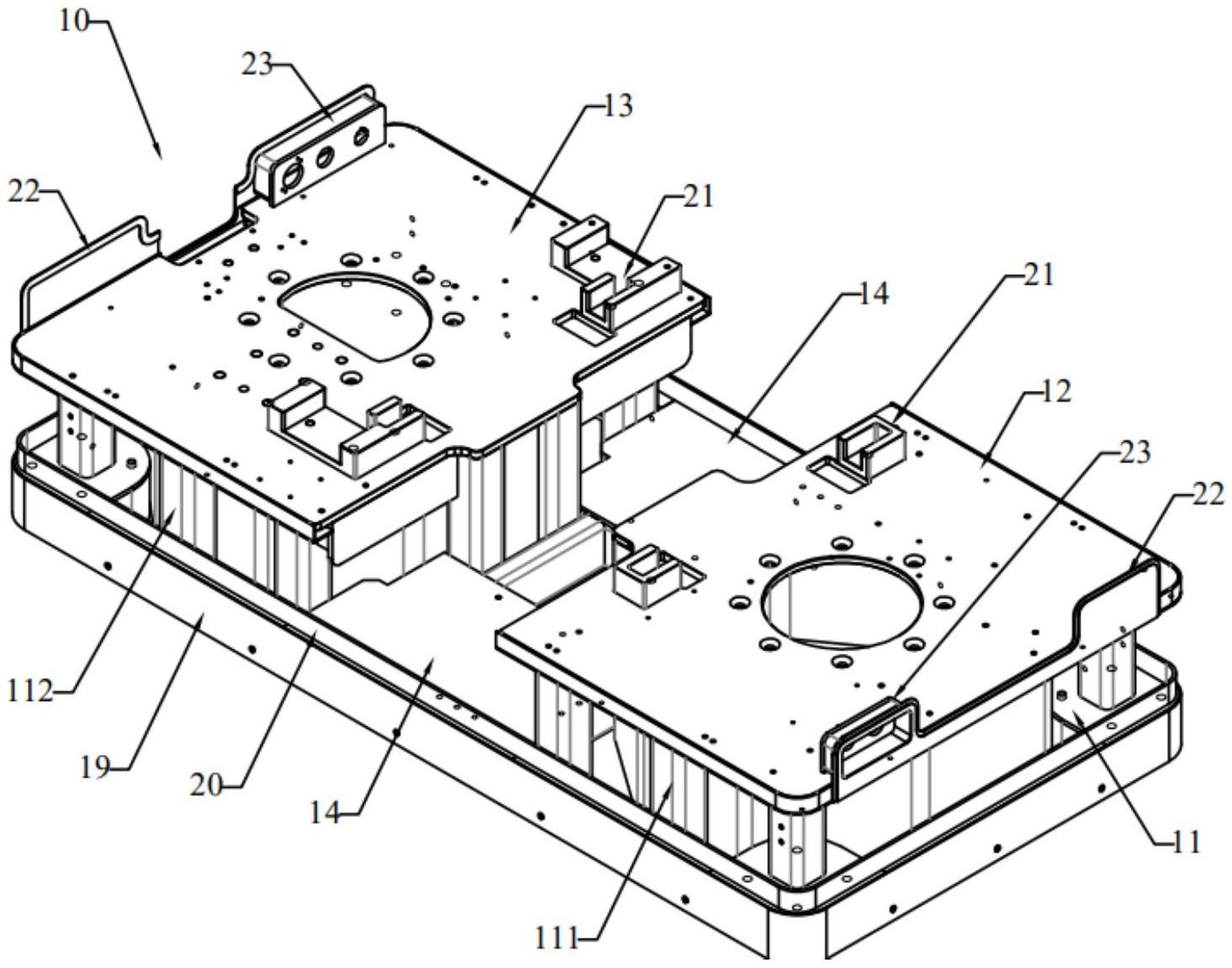
2、一种双舵轮全向agv底盘结构,包括:安装架;安装架的前后两端分别设有前支撑架和后支撑架;前支撑架的上端固定有用于安装元器件的前安装板;后支撑架的上端固定有用于安装元器件的后安装板;安装架在前支撑架和后支撑架的下方固定有底板;底板和前安装板之间形成有用于安装驱动前舵轮的前驱动组件的前驱动空间;底板和后安装板之间形成有用于安装驱动后舵轮的后驱动组件的后驱动空间;前舵轮安装于底板的位于前驱动空间的正下方的前舵轮安装位置;前舵轮安装位置形成有用于供前驱动组件的输出端连接前舵轮的前连接槽;后舵轮安装于底板的位于后驱动空间的正下方的后舵轮安装位置;后舵轮安装位置形成有用于供后驱动组件的输出端连接后舵轮的后连接槽;安装架在前支撑架和后支撑架之间形成有用于加固安装架的加固部;底板位于加固部下方;加固部的上方设有两块用于安装电池的电池安装板;两块电池安装板分别与安装架的两侧边相邻设置;两块电池安装板的相对的侧边均形成有用于安装相机的相机安装孔;两块电池安装板之间形成有用于容纳相机的部分并供相机拍摄下方地面的安装间隙;加固部的中部形成有用于配合安装间隙以容纳相机的部分并供相机拍摄下方地面的第一通槽;底板的中部形成有用于配合安装间隙和第一通槽以供相机拍摄下方地面的第二通槽。
3、进一步地,安装架为方形,且在其四个拐角均形成有用于安装固定辅助轮的安装凹部。
4、进一步地,安装架的周侧固定有用于对安装架进行防护包裹的围板;辅助轮位于围板的内侧。
5、进一步地,围板的上侧设有用于安装防撞条的防撞条安装板。
6、进一步地,前安装板和后安装板相对的侧边均设有用于安装顶升组件的顶升安装座;顶升组件位于两个电池的上方。
7、进一步地,前安装板和后安装板的相互远离的两个侧边均形成有用于防护安装的元器件的防护挡板。
8、进一步地,前安装板和后安装板的相互远离的两个侧边均形成有用于安装控制开关的开关安装板。
9、进一步地,底板的下侧在前后两端分别形成有用于安装前舵轮的前沉槽和用于安装后舵轮的后沉槽。
10、进一步地,加固部包括:多个加固柱和用于连接多个加固柱的加固梁;多个加固柱为空心结构。
11、进一步地,前支撑架和后支撑架结构相同,均包括:支撑柱和用于连接多个支撑柱的支撑梁;支撑柱为空心结构。
12、本实用新型的有益之处在于所提供的双舵轮全向agv底盘结构通过其结构设计能够在保证结构强度的同时对元器件和驱动组件进行分层及划区域安装,拆装维修方便,分散底盘的承重,从而避免底盘局部重力集中而导致变形,并且在提高集成化程度以保证agv复杂功能的实现的同时,降低各类元器件之间的电性干扰。
技术特征:
1.一种双舵轮全向agv底盘结构,其特征在于,包括:安装架;
2.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
3.根据权利要求2所述的双舵轮全向agv底盘结构,其特征在于,
4.根据权利要求3所述的双舵轮全向agv底盘结构,其特征在于,
5.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
6.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
7.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
8.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
9.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
10.根据权利要求1所述的双舵轮全向agv底盘结构,其特征在于,
技术总结
本技术公开了一种双舵轮全向AGV底盘结构,包括:安装架;安装架的前后两端分别设有前支撑架和后支撑架;前支撑架的上端固定有用于安装元器件的前安装板;后支撑架的上端固定有用于安装元器件的后安装板;底板和前安装板之间形成有用于安装驱动前舵轮的前驱动组件的前驱动空间;底板和后安装板之间形成有用于安装驱动后舵轮的后驱动组件的后驱动空间;加固部的上方设有两块用于安装电池的电池安装板;两块电池安装板的相对的侧边均形成有用于安装相机的相机安装孔。本技术的双舵轮全向AGV底盘结构的结构稳定性高,不易变形,元器件拆装方便且相互之间电性干扰小。
技术研发人员:杜相泉,李卫君
受保护的技术使用者:浙江迈睿机器人有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!