一种多足仿生机器人平台及机器人的制作方法
本技术涉及机器人,尤其涉及一种多足仿生机器人平台及机器人。
背景技术:
1、随着科技的迅速发展,机器人被广泛应用到探索、救援、生产等各个不同的领域中,并且机器人的种类也越来越多,功能越来越完善,但各有优点以及缺点;其中,轮式机器人和履带式机器人,结构简单,但是它们行走时对路面要求高,不能适应各种复杂环境;仿多足昆虫的多足机器人以复杂精妙的肢体结构和简易灵巧的运动控制策略,使其能轻易地穿越了各种复杂的自然地形,多足机器人的越障能力远远高于轮式机器人以及履带式机器人。多足机器人在运动时仅需要一些离散的点来供其落足,从而成功通过崎岖、松软或泥泞的地面,多足机器人还可以通过调节自身重心而避免倾覆,具有更高的稳定性。多足步行机器人在环境适应性和运动灵活性方面更具优势,也因其在复杂地表上更强的行走能力而受到了广泛重视。
2、在实际的应用过程中,目前六足机器人通常用于场景探索与救援,但是由于六足机器人在设计之初已经根据场景需要,定型了结构主体,因此在遇见复杂场景模式时,有些捉襟见肘,机器人结构主体对搭载功能限制较大,如何使六足机器人快速适应复杂的场景,是急需解决的问题。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,提供一种多足仿生机器人平台及机器人。
2、为了解决上述技术问题,本实用新型采用如下技术方案:
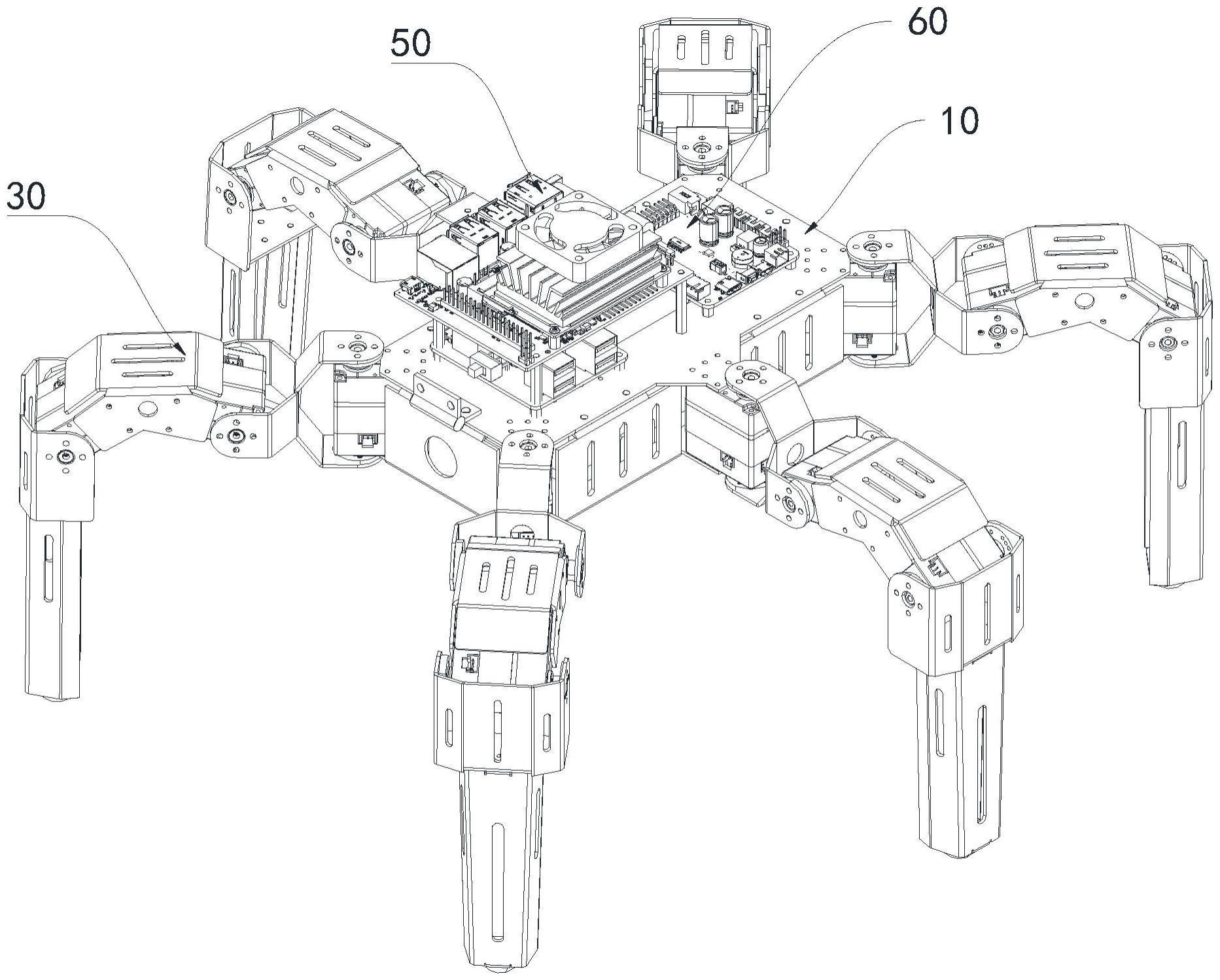
3、第一方面,本实用新型实施例提供一种多足仿生机器人平台,包括:机架、设于所述机架内的电源、连接于所述机架的若干个肢节组件、及设于所述机架上的主控板及开发板,所述电源及所述开发板与所述主控板电连接。
4、在一具体实施例中,所述机架内设有容纳腔,所述电源安装于所述容纳腔,所述容纳腔的底部设有可拆卸的底板。
5、在一具体实施例中,所述机架还设有盖板,所述主控板及所述开发板安装于所述盖板。
6、在一具体实施例中,所述盖板上还安装有扩展板,所述扩展板与所述主控板电连接。
7、在一具体实施例中,所述开发板上还安装有散热件。
8、在一具体实施例中,所述肢节组件的数量为至少4个。
9、在一具体实施例中,所述肢节组件包括机身舵机、基节支架、基节舵机、关节支架、关节舵机、腿关节及胫肢节,所述机身舵机与所述机架连接,所述基节支架的一端与所述机身舵机活动连接,另一端与所述基节舵机活动连接,所述关节支架的一端与所述基节舵机连接,另一端与所述关节舵机连接,所述腿关节的一端与所述关节舵机活动连接,另一端与所述胫肢节连接。
10、在一具体实施例中,所述胫肢节的底部还设有减震垫。
11、本实用新型的多足仿生机器人平台,与现有技术相比的有益效果是:通过机架内设有电源、连接于机架的若干个肢节组件、及设于机架上的主控板及开发板,电源及开发板与主控板电连接,以组成一个单独的仿生机器人底盘,可以实现不同场景之下快速替换不同的搭载结构,实现机器人多元化快速改造和应用,也可以根据个人不同需求,在单独的底盘基础上,实现对仿生机器人其他功能的扩展、开发。
12、第二方面,本实用新型实施例提供一种机器人,包括搭载组件及如上述的多足仿生机器人平台,所述搭载组件安装于所述多足仿生机器人平台。
13、在一具体实施例中,所述搭载组件包括载板、相机、雷达、天线及显示屏,所述相机、雷达、天线及显示屏安装于所述载板,所述载板连接于所述机架,所述相机、雷达、天线及显示屏与所述主控板电连接。
14、本实用新型的机器人,与现有技术相比的有益效果是:通过机架内设有电源、连接于机架的若干个肢节组件、及设于机架上的主控板及开发板,电源及开发板与主控板电连接,以组成一个单独的仿生机器人底盘,然后在底盘上安装搭载组件,以实现机器视觉任务,还可以根据不同场景,快速替换不同的搭载结构,实现机器人多元化快速改造和应用,也可以根据个人不同需求,在单独的底盘基础上,实现对仿生机器人其他功能的扩展、开发。
15、下面结合附图和具体实施例对本实用新型作进一步描述。
技术特征:
1.一种多足仿生机器人平台,其特征在于,包括:机架、设于所述机架内的电源、连接于所述机架的若干个肢节组件、及设于所述机架上的主控板及开发板,所述电源及所述开发板与所述主控板电连接。
2.根据权利要求1所述的一种多足仿生机器人平台,其特征在于,所述机架内设有容纳腔,所述电源安装于所述容纳腔,所述容纳腔的底部设有可拆卸的底板。
3.根据权利要求1所述的一种多足仿生机器人平台,其特征在于,所述机架还设有盖板,所述主控板及所述开发板安装于所述盖板。
4.根据权利要求3所述的一种多足仿生机器人平台,其特征在于,所述盖板上还安装有扩展板,所述扩展板与所述主控板电连接。
5.根据权利要求1所述的一种多足仿生机器人平台,其特征在于,所述开发板上还安装有散热件。
6.根据权利要求1所述的一种多足仿生机器人平台,其特征在于,所述肢节组件的数量为至少4个。
7.根据权利要求1所述的一种多足仿生机器人平台,其特征在于,所述肢节组件包括机身舵机、基节支架、基节舵机、关节支架、关节舵机、腿关节及胫肢节,所述机身舵机与所述机架连接,所述基节支架的一端与所述机身舵机活动连接,另一端与所述基节舵机活动连接,所述关节支架的一端与所述基节舵机连接,另一端与所述关节舵机连接,所述腿关节的一端与所述关节舵机活动连接,另一端与所述胫肢节连接。
8.根据权利要求7所述的一种多足仿生机器人平台,其特征在于,所述胫肢节的底部还设有减震垫。
9.一种机器人,其特征在于,包括搭载组件及如权利要求1-8中任一项所述的多足仿生机器人平台,所述搭载组件安装于所述多足仿生机器人平台。
10.根据权利要求9所述的一种机器人,其特征在于,所述搭载组件包括载板、相机、雷达、天线及显示屏,所述相机、雷达、天线及显示屏安装于所述载板,所述载板连接于所述机架,所述相机、雷达、天线及显示屏与所述主控板电连接。
技术总结
本技术公开了一种多足仿生机器人平台及机器人;所述多足仿生机器人平台,包括:机架、设于所述机架内的电源、连接于所述机架的若干个肢节组件、及设于所述机架上的主控板及开发板,所述电源及所述开发板与所述主控板电连接。本技术通过机架内设有电源、连接于机架的若干个肢节组件、及设于机架上的主控板及开发板,电源及开发板与主控板电连接,以组成一个单独的仿生机器人底盘,可以实现不同场景之下快速替换不同的搭载结构,实现机器人多元化快速改造和应用,也可以根据个人不同需求,在单独的底盘基础上,实现对仿生机器人其他功能的扩展、开发。
技术研发人员:许政博
受保护的技术使用者:深圳市亚博智能科技有限公司
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!