用于变电站巡检机器人的防倾倒装置的制作方法
本申请涉及巡检机器人,尤其是涉及一种用于变电站巡检机器人的防倾倒装置。
背景技术:
1、变电站巡检机器人用于变电站设备巡检作业的移动巡检装置,主要由移动载体、通信设备和检测设备等组成,采用遥控或全自主运行模式。变电站智能巡检机器人的出现,提高了变电站巡检工作效率和质量,降低了巡视人员的工作负荷,符合当下无人化、智能化的发展趋势。
2、相关技术中申请号为cn202220822569.6的中国专利,提出了一种变电站室内自动巡检机器人,包括车体、功能组件、转动轮组件、控制中心、机械臂、无线通信模块、驱动轮组件、云台和图像采集组件;功能组件设置在车体的外表面,转动轮组件和驱动轮组件分别穿过车体,并平行设置,控制中心设置于车体的内部,机械臂与车体的顶部转动连接,车体的顶部具有收纳槽,收纳槽位于机械臂的下方,无线通信模块设置于车体的顶部,云台与机械臂的顶端可拆卸连接,图像采集组件与云台可拆卸连接,并位于云台的顶部。
3、针对上述中的相关技术,车体带动机械臂、云台和图像采集组件在地面上移动进行巡检,由于变电站设备架设的高度较高,使得机械臂需要将云台和图像采集组件托举至车体上方的一定高度处,导致整个巡检机器人的重心位置升高。当车体移动至坡度较大的地方后,巡检机器人由于重心位置高而容易产生倾倒。
技术实现思路
1、为了改善巡检机器人在坡度较大的地面上移动时易产生倾倒的问题,本申请提供一种用于变电站巡检机器人的防倾倒装置。
2、本申请提供的一种用于变电站巡检机器人的防倾倒装置采用如下的技术方案:
3、一种用于变电站巡检机器人的防倾倒装置,包括安装在车体行进方向两端的支撑杆,所述支撑杆远离所述车体的一端上安装有滚轮,所述滚轮的滚动方向与车体的行进方向一致,所述车体上设置有用于驱使所述滚轮滚动抵接在地面上抵紧组件。
4、通过采用上述技术方案,车体在平整的地面上移动时,滚轮跟随车体在地面上滚动。当车体移动到坡体上时,由于滚轮通过支撑杆架设在车体靠近坡体下方的一侧,同时抵紧组件驱使滚轮滚动抵紧在地面上,使得车体不易在坡体上产生倾翻。
5、可选的,所述抵紧组件包括铰接座和第一弹性件,所述支撑杆远离所述滚轮的一端通过所述铰接座铰接在所述车体上,所述第一弹性件驱使所述支撑杆绕所述铰接座朝地面方向转动。
6、通过采用上述技术方案,支撑杆通过铰接座转动安装在车体上,同时第一弹性件驱使支撑杆带动滚轮始终抵紧在地面上,一方面使得当地面不平整时,滚轮不易被卡住,车体依旧可以稳定移动;另一方面使得当车体在坡体上朝坡体下方倾倒时,滚轮推动支撑杆绕铰接座转动,此时第一弹性件产生形变,形变后的第一弹性件驱使支撑杆将滚动以更大的抵紧力抵紧在坡面上,有效阻碍车体产生倾翻。
7、可选的,所述抵紧组件包括套杆和第二弹性件,所述套杆滑移穿设所述支撑杆设置,所述套杆通过所述第二弹性件连接在所述支撑杆上,所述滚轮转动安装在所述套杆端部。
8、通过采用上述技术方案,滚轮通过套杆升降滑移安装在支撑杆上,第二弹性件驱使滚轮弹性抵紧在地面上,使得车体可带动滚轮在不平整的地面上移动。当车体运动至坡体上时,若车体朝坡体下方产生倾翻时,滚轮推动套杆在支撑杆上滑移,此时第二弹性件产生形变,形变后的第二弹性件驱使套杆将滚动以更大的抵紧力抵紧在坡面上,有效阻碍车体产生倾翻。
9、可选的,所述抵紧组件还包括螺纹套设在所述套杆上的螺纹筒,所述螺纹筒位于所述支撑杆靠近所述滚轮的一侧,所述第二弹性件设置为弹簧,所述弹簧套设在所述套杆上,所述弹簧的一端与所述螺纹筒连接、另一端抵接在所述支撑杆上。
10、通过采用上述技术方案,弹簧的一端通过螺纹筒与套杆连接、另一端与支撑杆抵接。当坡体的坡度大,使得弹簧的弹力不足以阻碍车体产生倾翻时,可预先转动螺纹筒,使得螺纹筒在套杆上朝靠近支撑杆的方向运动,使得弹簧以更大的弹力驱使滚轮抵紧在地面上,进而有效阻碍车体在坡度较大的坡体上产生倾翻。
11、可选的,所述套杆上沿其长度方向均匀设置有多个第一刻度线。
12、通过采用上述技术方案,根据第一刻度线可将螺纹筒快速调整至套杆的合适位置上,从而提高了对车体上抵紧组件的调节效率。
13、可选的,所述车体上开设有沿其行进方向分布的安装槽,所述安装槽内滑动设置有滑动块,所述支撑杆安装在所述滑动块上,所述车体上设置有用于锁止所述滑动块的锁止件。
14、通过采用上述技术方案,当坡体的坡度较大时,可驱使滑动块在安装槽内朝远离车体的方向滑动,使得滚轮与车体之间的距离增大;随后通过锁止件将滑动块锁止固定在车体上,使得滚轮与车体之间的距离恒定,进而使得当车体在较大坡度的坡体上时,滚轮可对车体进行稳定支撑,尽可能避免车体在坡体上产生倾翻。
15、可选的,所述锁止件设置为锁止螺钉,所述车体上沿所述安装槽长度方向均匀开设有多个供所述锁止螺钉螺旋插接的螺纹孔,所述锁止螺钉穿设所述螺纹孔与所述滑动块抵接。
16、通过采用上述技术方案,当需要将滑动块锁止在车体上时,只需要将锁止螺钉螺纹穿设车体上的螺纹孔,并使得锁止螺钉端部抵紧在滑动块上,从而完成将滑动块快速锁止固定在车体上的操作。
17、可选的,所述车体上沿所述安装槽长度方向均匀设置有多个第二刻度线。
18、通过采用上述技术方案,根据第二刻度线可快速将滑动块移动至安装槽内合适的位置,从而快速完成滚轮位置的调节。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.当车体移动到坡体上时,由于滚轮通过支撑杆架设在车体靠近坡体下方的一侧,同时抵紧组件驱使滚轮滚动抵紧在地面上,使得车体不易在坡体上产生倾翻;
21、2.当车体在坡体上朝坡体下方倾倒时,滚轮推动支撑杆绕铰接座转动,此时第一弹性件产生形变,形变后的第一弹性件驱使支撑杆将滚动以更大的抵紧力抵紧在坡面上,有效阻碍车体产生倾翻;
22、3.当车体运动至坡体上时,若车体朝坡体下方产生倾翻时,滚轮推动套杆在支撑杆上滑移,此时第二弹性件产生形变,形变后的第二弹性件驱使套杆将滚动以更大的抵紧力抵紧在坡面上,有效阻碍车体产生倾翻。
技术特征:
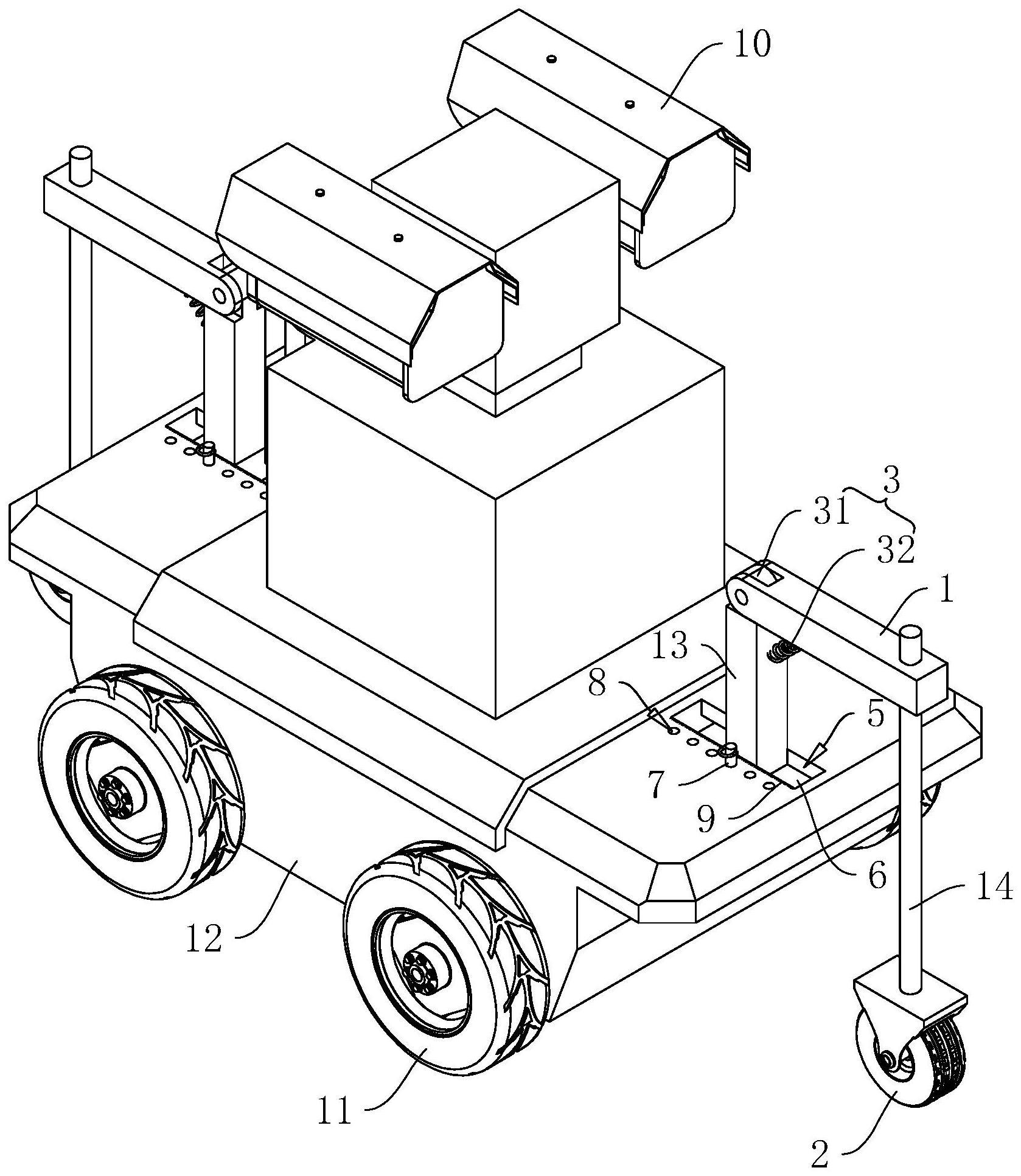
1.一种用于变电站巡检机器人的防倾倒装置,其特征在于:包括安装在车体(12)行进方向两端的支撑杆(1),所述支撑杆(1)远离所述车体(12)的一端上安装有滚轮(2),所述滚轮(2)的滚动方向与车体(12)的行进方向一致,所述车体(12)上设置有用于驱使所述滚轮(2)滚动抵接在地面上抵紧组件(3)。
2.根据权利要求1所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述抵紧组件(3)包括铰接座(31)和第一弹性件(32),所述支撑杆(1)远离所述滚轮(2)的一端通过所述铰接座(31)铰接在所述车体(12)上,所述第一弹性件(32)驱使所述支撑杆(1)绕所述铰接座(31)朝地面方向转动。
3.根据权利要求1所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述抵紧组件(3)包括套杆(33)和第二弹性件(34),所述套杆(33)滑移穿设所述支撑杆(1)设置,所述套杆(33)通过所述第二弹性件(34)连接在所述支撑杆(1)上,所述滚轮(2)转动安装在所述套杆(33)端部。
4.根据权利要求3所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述抵紧组件(3)还包括螺纹套设在所述套杆(33)上的螺纹筒(35),所述螺纹筒(35)位于所述支撑杆(1)靠近所述滚轮(2)的一侧,所述第二弹性件(34)设置为弹簧,所述弹簧套设在所述套杆(33)上,所述弹簧的一端与所述螺纹筒(35)连接、另一端抵接在所述支撑杆(1)上。
5.根据权利要求4所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述套杆(33)上沿其长度方向均匀设置有多个第一刻度线(4)。
6.根据权利要求1所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述车体(12)上开设有沿其行进方向分布的安装槽(5),所述安装槽(5)内滑动设置有滑动块(6),所述支撑杆(1)安装在所述滑动块(6)上,所述车体(12)上设置有用于锁止所述滑动块(6)的锁止件(7)。
7.根据权利要求6所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述锁止件(7)设置为锁止螺钉,所述车体(12)上沿所述安装槽(5)长度方向均匀开设有多个供所述锁止螺钉螺旋插接的螺纹孔(8),所述锁止螺钉穿设所述螺纹孔(8)与所述滑动块(6)抵接。
8.根据权利要求6所述的用于变电站巡检机器人的防倾倒装置,其特征在于:所述车体(12)上沿所述安装槽(5)长度方向均匀设置有多个第二刻度线(9)。
技术总结
本申请公开了一种用于变电站巡检机器人的防倾倒装置,涉及巡检机器人技术领域,其包括安装在车体行进方向两端的支撑杆,所述支撑杆远离所述车体的一端上安装有滚轮,所述滚轮的滚动方向与车体的行进方向一致,所述车体上设置有用于驱使所述滚轮滚动抵接在地面上抵紧组件。本申请具有防止巡检机器人产生倾倒的效果。
技术研发人员:陈柔先,尤作
受保护的技术使用者:富先智能科技(武汉)有限公司
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!