一种机器人履带行走系统的制作方法
本技术属于机器人行走系统,并具体公开了一种机器人履带行走系统。
背景技术:
1、履带式机器人底盘可以适应各种复杂地形,具有稳定性好、对路况要求低、脱困能力强等优点,被广泛用于野外侦察、巡检机器人承载底盘。而履带行走系统作为履带式机器人底盘的核心通常采用与底盘固定的连接方式,即履带中浮动梁直接与底盘侧壁固定连接,机器人底盘的减震效果完全由设置在浮动梁与支撑轮之间的履带减震器来完成。采用这种结构的机器人底盘在行走过程中,当一侧的履带遇到障碍而发生上下颠簸时,会将这种颠簸传递给车体底盘和另一侧的履带,不但影响车体底盘的稳定性,而且会改变另一侧履带与地面的接触角度和面积,使该侧的履带附着力下降,不利于机器人脱困,此外,这种结构的履带行走系统减震能力有限,难以满足某些搭载精密仪器的机器人配套要求。
技术实现思路
1、实用新型要解决的技术问题是:提供一种机器人履带行走系统,该机器人履带行走系统具有两级减震,滤震效果好,一侧履带遇到障碍时对另一侧履带的附着力影响小,使用该机器人履带行走系统的机器人底盘脱困能力强,可以满足搭载高精密仪器的野外作业机器人的使用要求。
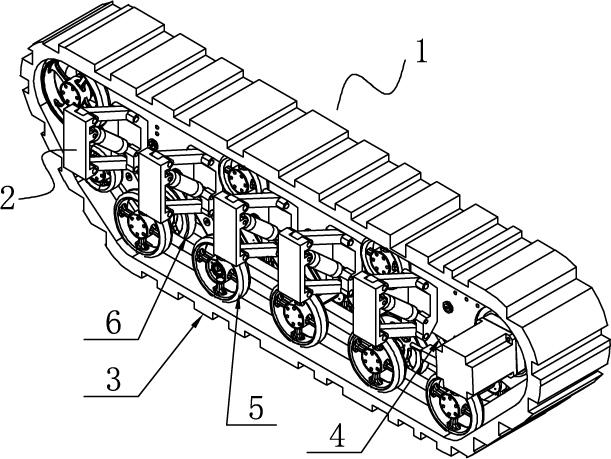
2、解决技术问题所采取的技术方案:一种机器人履带行走系统,包括内部具有履带减震器的履带组件和将履带组件与机器人底盘连接起来的多个平行四边形机构,所述履带组件为由电动机直接驱动的履带组件,所述平行四边形机构由履带连接座、底盘连接座、上连接杆、下连接杆铰接构成,所述履带连接座固定在履带组件上,所述底盘连接座固定在机器人车体底盘上,在履带连接座与底盘连接座之间设有车体减震器。
3、作为本实用新型的进一步改进方案:所述履带组件包括履带,在履带内部的空间内设有纵向浮动梁,在浮动梁的前端装有导向轮,在浮动梁的后端装有驱动轮及驱动电机和减速器,在浮动梁上装有多个上托轮,在浮动梁的下方设有多个支撑轮,每个支撑轮通过一根拖拽臂与浮动梁连接,在每个拖拽臂与浮动梁之间设有一个履带减震器,导向轮、上托轮、驱动轮、支撑轮将履带张紧成倒置的梯形。
4、作为本实用新型的进一步改进方案:每个支撑轮由一根支撑轮轴和两个并列的支撑轮体构成,所述履带组件还包括至少两个防脱轮,所述防脱轮安装在两个支撑轮体之间的支撑轮轴上,在履带上对应防脱轮位置设有纵向防脱槽。
5、作为本实用新型的进一步改进方案:所述浮动梁由两块纵向梁板平行连接构成。
6、作为本实用新型的进一步改进方案:在浮动梁上设有履带张紧机构,所述履带张紧机构包括设置在两浮动梁板之间的导向轮滑座及使导向轮滑座仅可以沿浮动梁板走向前后滑动的导向装置,所述导向轮安装在导向轮滑座前端的轮叉上,在导向轮滑座的后端设有与水平面垂直、与浮动梁板成一定夹角的张紧斜面,在两块浮动梁板之间还设有仅可以在垂直于梁板方向移动的张紧滑块,在张紧滑块前端设有与张紧斜面滑动配合的驱动斜面,在张紧滑块后方的两块浮动梁板之间固定有张紧滑块导向支撑板,在浮动梁板上还设有控制张紧滑块移动的丝杆,在张紧滑块上设有与丝杆相配合的丝母。
7、作为本实用新型的进一步改进方案:所述车体减震器一端铰接在履带连接座下段、另一端铰接在底盘连接座的上段。
8、作为本实用新型的进一步改进方案:所述上托轮由一根托轮轴和两个并列的托轮体构成。
9、作为本实用新型的进一步改进方案:在两块浮动梁板之间设有多根将两块浮动梁板连接起来的连接轴,连接轴与履带连接座对应排列并连接。
10、作为本实用新型的进一步改进方案:所述减速器为摆线针轮减速器。
11、有益效果:本实用新型的一种机器人履带行走系统,由于采用了多个平行四边形机构将履带组件和车体底盘连接起来,所述履带组件为由电动机直接驱动的履带组件,并在履带连接座与底盘连接座之间设有车体减震器的技术方案,使车体底盘两侧的机器人履带行走系统与车体底盘之间形成独立悬挂,且履带的接地面始终与车体底盘的承载面保持平行,因此,一侧履带遇到障碍产生颠簸时不会改变履带的接地面与车体底盘承载面之间的平行关系,使另一侧履带依然具有良好的接地面,对另一侧履带的附着力影响小,使用该机器人履带行走系统的机器人底盘脱困能力强,由于在平行四边形机构中设置的车体减震器,与履带内部的常规履带减震器形成两级减震,滤震效果好,可以满足搭载高精密仪器的野外作业机器人的使用要求,此外,本实用新型的一种机器人履带行走系统采用将驱动电机安装在履带组件内的电动机直接驱动方式,车体底盘与履带之间没有传动机构,使履带组件在水平和垂直两个轴上位移时不会影响驱动效果。由于采用了所述履带组件包括履带,在履带内部的空间内设有纵向浮动梁,在纵向浮动梁的前端装有导向轮,在纵向浮动梁的后端装有驱动轮及驱动电机和减速器,在纵向浮动梁上装有多个上托轮,在纵向浮动梁的下方设有多个支撑轮,每个支撑轮通过一根拖拽臂与纵向浮动梁连接,在每个拖拽臂与纵向浮动梁之间设有一个履带减震器,导向轮、上托轮、驱动轮、支撑轮将履带张紧成倒置的梯形的技术特征,使得履带组件结构简单、承载能力强,且内部的减震效果更好。由于采用了每个支撑轮由一根支撑轮轴和两个并列的支撑轮体构成,所述履带组件还包括至少两个防脱轮,所述防脱轮安装在两个支撑轮体之间的支撑轮轴上,在履带上对应防脱轮位置设有纵向防脱槽的技术特征,使本实用新型的机器人履带行走系统具备防止履带脱轨功能,越野能力更强。由于采用了所述纵向浮动梁由两块浮动梁板平行连接构成,在两块浮动梁板之间设有多根将两块浮动梁板连接起来的连接轴,连接轴与履带连接座对应排列并连接的技术特征,使本实用新型的机器人履带行走系统结构更紧凑,承载能力更强,抗冲击性能更好。由于采用了在纵向浮动梁上设有由丝杆丝母机构控制的履带张紧机构的技术特征,使得履带的张紧操作更方便。由于采用了所述车体减震器一端铰接在履带连接座下段、另一端铰接在底盘连接座的上段的技术特征,使减震器的减震效果更好。由于采用了所述上托轮由一根托轮轴和两个并列的托轮体构成的技术特征,使得履带运行更平稳,且不易脱轨。由于采用了所述减速器为摆线针轮减速器的技术特征,使驱动电机轴与驱动轮轴在同一轴心线上,履带组件的结构更紧凑,减速器可以正、反两个方向运转,使履带行走系统的转向更灵活。
技术特征:
1.一种机器人履带行走系统,包括内部具有履带减震器的履带组件和将履带组件与机器人底盘连接起来的多个平行四边形机构,其特征是:所述履带组件为由电动机直接驱动的履带组件,所述平行四边形机构由履带连接座、底盘连接座、上连接杆、下连接杆铰接构成,所述履带连接座固定在履带组件上,所述底盘连接座固定在机器人车体底盘上,在履带连接座与底盘连接座之间设有车体减震器。
2. 根据权利要求1 所述的机器人履带行走系统,其特征是:所述履带组件包括履带,在履带内部的空间内设有纵向浮动梁,在纵向浮动梁的前端装有导向轮,在纵向浮动梁的后端装有驱动轮及驱动电机和减速器,在纵向浮动梁上装有多个上托轮,在纵向浮动梁的下方设有多个支撑轮,每个支撑轮通过一根拖拽臂与纵向浮动梁连接,在每个拖拽臂与纵向浮动梁之间设有一个履带减震器,导向轮、上托轮、驱动轮、支撑轮将履带张紧成倒置的梯形。
3. 根据权利要求2 所述的机器人履带行走系统,其特征是:每个支撑轮由一根支撑轮轴和两个并列的支撑轮体构成,所述履带组件还包括至少两个防脱轮,所述防脱轮安装在两个支撑轮体之间的支撑轮轴上,在履带上对应防脱轮位置设有纵向防脱槽。
4. 根据权利要求3 所述的机器人履带行走系统,其特征是:所述纵向浮动梁由两块浮动梁板平行连接构成。
5. 根据权利要求2 至4 任一项所述的机器人履带行走系统,其特征是:在纵向浮动梁上设有履带张紧机构,所述履带张紧机构包括设置在两块浮动梁板之间的导向轮滑座及使导向轮滑座仅可以沿浮动梁板走向前后滑动的导向装置,所述导向轮安装在导向轮滑座前端的轮叉上,在导向轮滑座的后端设有与水平面垂直、与浮动梁板成一定夹角的张紧斜面,在两块浮动梁板之间还设有仅可以在垂直于浮动梁板方向移动的张紧滑块,在张紧滑块前端设有与张紧斜面滑动配合的驱动斜面,在张紧滑块后方的两块浮动梁板之间固定有张紧滑块导向支撑板,在浮动梁板上还设有控制张紧滑块移动的丝杆,在张紧滑块上设有与丝杆相配合的丝母。
6. 根据权利要求1 所述的机器人履带行走系统,其特征是:所述车体减震器一端铰接在履带连接座下段、另一端铰接在底盘连接座的上段。
7. 根据权利要求5 所述的机器人履带行走系统,其特征是:所述上托轮由一根托轮轴和两个并列的托轮体构成。
8. 根据权利要求7 所述的机器人履带行走系统,其特征是:在两块浮动梁板之间设有多根将两块浮动梁板连接起来的连接轴,连接轴与履带连接座对应排列并连接。
9. 根据权利要求8 所述的机器人履带行走系统,其特征是:所述减速器为摆线针轮减速器。
技术总结
本技术属于机器人行走系统技术领域,并具体公开了一种机器人履带行走系统,该机器人履带行走系统包括内部具有履带减震器的履带组件和将履带组件与机器人底盘连接起来的多个平行四边形机构,所述履带组件为由电动机直接驱动的履带组件,所述平行四边形机构由履带连接座、底盘连接座、上连接杆、下连接杆铰接构成,所述履带连接座固定在履带组件上,所述底盘连接座固定在机器人车体底盘上,在履带连接座与底盘连接座之间设有车体减震器。该机器人履带行走系统具有两级减震,滤震效果好,一侧履带遇到障碍时对另一侧履带的附着力影响小,使用该机器人履带行走系统的机器人底盘脱困能力强,可以满足搭载高精密仪器的野外作业机器人的使用要求。
技术研发人员:刘广超,魏延旭,徐国玉,陈玲,彭会军
受保护的技术使用者:沈阳吕尚科技有限公司
技术研发日:20230621
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!