一种履带式移动平台及机器人
本技术涉及机器人,具体而言,涉及一种履带式移动平台及机器人。
背景技术:
1、履带式行走机构相对于轮胎式行走机构具有支承面积大,接地比压小,牵引附着性能好等优点,能适应不规则的行驶环境,广泛应用于工程机械、军用设备、特种车辆以及移动机器人。目前的履带行走机构一般为固定结构形式,履带的外轮廓是固定的无法根据前行方向地形进行变化,移动平台两侧的履带也无法独立变形调节以适应两侧地形的差异。因此,履带行走机构在起伏地面行驶时,例如,高原、山地等地形复杂,高度落差大的环境中,其使用地形的能力差,导致移动平台颠簸振动剧烈,使得部件磨损加剧以及整车寿命降低,且在横滚角和俯仰角较大的复杂地形下,容易发生倾覆。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种履带式移动平台及及机器人,以解决上述问题。
2、本实用新型采用了如下方案:
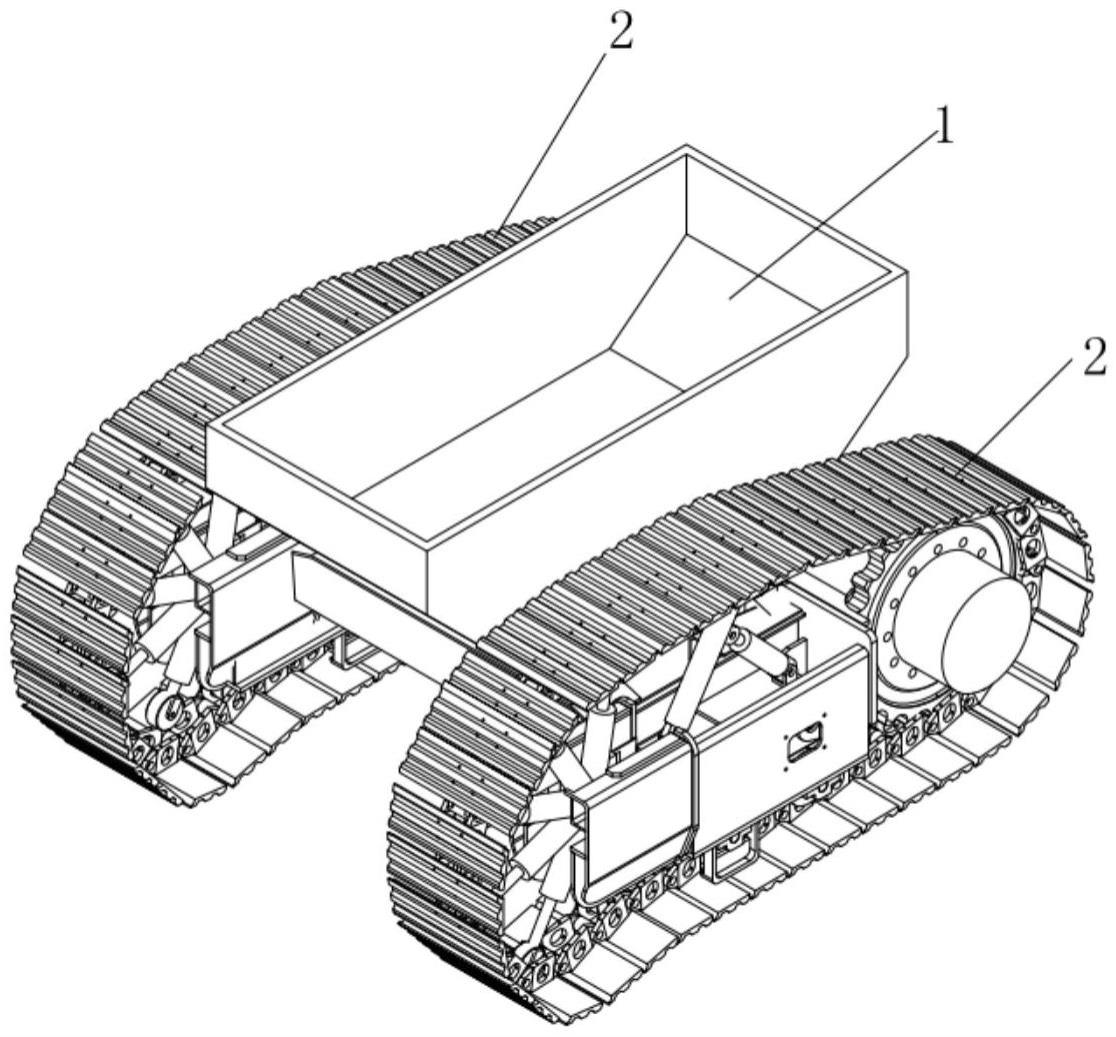
3、本申请提供了一种履带式移动平台,包括中央平台、对称设置于所述中央平台两侧的两个履带总成;所述履带总成包括履带、固定架、驱动轮、变径导向轮、变幅机构、支重轮、可调张紧轮机构;
4、所述固定架连接于所述中央平台的侧面;所述驱动轮连接于所述固定架的一端,用于驱动所述履带;所述变径导向轮通过所述变幅机构连接于所述固定架连接的另一端;所述变幅机构用以使所述变径导向轮靠近或远离所述驱动轮;所述变径导向轮可沿其径向改变所述履带的行走轮廓;所述支重轮设置于所述固定架下方,并与所述履带传动连接;所述可调张紧轮机构设置于所述固定架上方,且其张紧轮与所述履带传动连接。
5、进一步地,所述变径导向轮包括固定盘、多个第一液压缸及导向轮;所述第一液压缸的缸筒沿所述固定盘的径向固定于所述固定盘上,且可独立控制;所述第一液压缸的推杆端连接所述导向轮;所述导向轮与所述履带传动连接。
6、进一步地,所述第一液压缸还设置有位移传感器或行程开关。
7、进一步地,包括有6个所述第一液压缸及所述导向轮,6个所述第一液压缸均布于所述固定盘远离所述变幅机构的前半区域。
8、进一步地,所述变幅机构包括第二液压缸、外支撑套筒、内支撑套筒;所述外支撑套筒与所述内支撑套筒相互套合;所述第二液压缸置于所述内支撑套筒与所述外支撑套筒内;所述液压缸的缸筒与内支撑套筒固定连接,并连接于所述变径导向轮;液压缸的活塞杆端与外支撑套筒端面固定连接,并连接于所述固定架连接。
9、进一步地,还包括有多个耐磨块,其设置于所述外支撑套筒的内侧壁和/或所述内支撑套筒的外侧壁上。
10、进一步地,所述可调张紧轮机构包括第三液压缸、第四液压缸及张紧轮;所述第三液压缸和所述第四液压缸的缸筒端铰接于所述固定架上;所述第四液压缸的推杆端铰接于所述第三液压缸的缸筒上;所述张紧轮设置于所述第三液压缸的推杆端,并与所述履带传动连接。
11、本实用新型还提供了一种机器人,包括所述的履带式移动平台。
12、通过采用上述技术方案,本实用新型可以取得以下技术效果:
13、本实用新型提供了一种履带式移动平台,包括中央平台、对称设置于所述中央平台两侧的两个履带总成;所述履带总成包括履带、固定架、驱动轮、变径导向轮、变幅机构、支重轮、可调张紧轮机构;所述履带由驱动轮、变径导向轮、支重轮、可调张紧机构共同支撑并形成具体运动轮廓,并通过变径导向轮上个变径支点的调节,可在行进过程中柔性地变化履带的前半部分形状的变化,以适应各种地形的变化;大大降低了移动平台颠簸振动剧烈,减少部件磨损提高整车寿命,且能有效避免在横滚角和俯仰角较大的复杂地形下,发生倾覆的情况。
技术特征:
1.一种履带式移动平台,其特征在于,包括中央平台、对称设置于所述中央平台两侧的两个履带总成;所述履带总成包括履带、固定架、驱动轮、变径导向轮、变幅机构、支重轮、可调张紧轮机构;
2.根据权利要求1所述的履带式移动平台,其特征在于,所述变径导向轮包括固定盘、多个第一液压缸及导向轮;所述第一液压缸的缸筒沿所述固定盘的径向固定于所述固定盘上,且可独立控制;所述第一液压缸的推杆端连接所述导向轮;所述导向轮与所述履带传动连接。
3.根据权利要求2所述的履带式移动平台,其特征在于,所述第一液压缸还设置有位移传感器或行程开关。
4.根据权利要求2所述的履带式移动平台,其特征在于,包括有6个所述第一液压缸及所述导向轮,6个所述第一液压缸均布于所述固定盘远离所述变幅机构的前半区域。
5.根据权利要求1所述的履带式移动平台,其特征在于,所述变幅机构包括第二液压缸、外支撑套筒、内支撑套筒;所述外支撑套筒与所述内支撑套筒相互套合;所述第二液压缸置于所述内支撑套筒与所述外支撑套筒内;所述液压缸的缸筒与内支撑套筒固定连接,并连接于所述变径导向轮;液压缸的活塞杆端与外支撑套筒端面固定连接,并连接于所述固定架连接。
6.根据权利要求5所述的履带式移动平台,其特征在于,还包括有多个耐磨块,其设置于所述外支撑套筒的内侧壁和/或所述内支撑套筒的外侧壁上。
7.根据权利要求1所述的履带式移动平台,其特征在于,所述可调张紧轮机构包括第三液压缸、第四液压缸及张紧轮;所述第三液压缸和所述第四液压缸的缸筒端铰接于所述固定架上;所述第四液压缸的推杆端铰接于所述第三液压缸的缸筒上;所述张紧轮设置于所述第三液压缸的推杆端,并与所述履带传动连接。
8.一种机器人,其特征在于,包括权利要求1-7中任意一项所述的履带式移动平台。
技术总结
本技术提供了一种履带式移动平台及机器人,所述履带式移动平台包括中央平台、对称设置于所述中央平台两侧的两个履带总成;所述履带总成包括履带、固定架、驱动轮、变径导向轮、变幅机构、支重轮、可调张紧轮机构;所述履带由驱动轮、变径导向轮、支重轮、可调张紧机构共同支撑并形成具体运动轮廓,并通过变径导向轮上个变径支点的调节,可在行进过程中柔性地变化履带的前半部分形状的变化,以适应各种地形的变化;大大降低了移动平台颠簸振动剧烈,减少部件磨损提高整车寿命,且能有效避免在横滚角和俯仰角较大的复杂地形下,发生倾覆的情况。
技术研发人员:林元正,林添良,郑伟杰,缪骋,陈其怀,任好玲,陈龙
受保护的技术使用者:华侨大学
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!