一种轮腿式仿袋鼠跳跃机器人
本技术涉及特种机器人领域,具体涉及一种轮腿式仿袋鼠跳跃机器人。
背景技术:
1、当前特种机器人发展迅速,特种机器人技术已经渗透到如抗震救灾、军事侦察、考古发掘等多个领域中,逐步取代人工作业。特种机器人技术已成为社会发展不可或缺的一部分。现有的特种机器人根据应用领域的不同具有轮式运动,跳跃运动,双足运动,爬行运动等多种移动方式。
2、申请号为201911013057.4的专利,提供了一种四轮式轮腿机器人,其虽能实现两种运动模式,但并未通过改变机器人形态来实现更好的运动效果。在户外工作需要跳跃运动时,直接用轮式结构接触地面,极易造成轮式结构损坏,如果路面不平整则会发生滑动,使机器人偏离运动路线。
技术实现思路
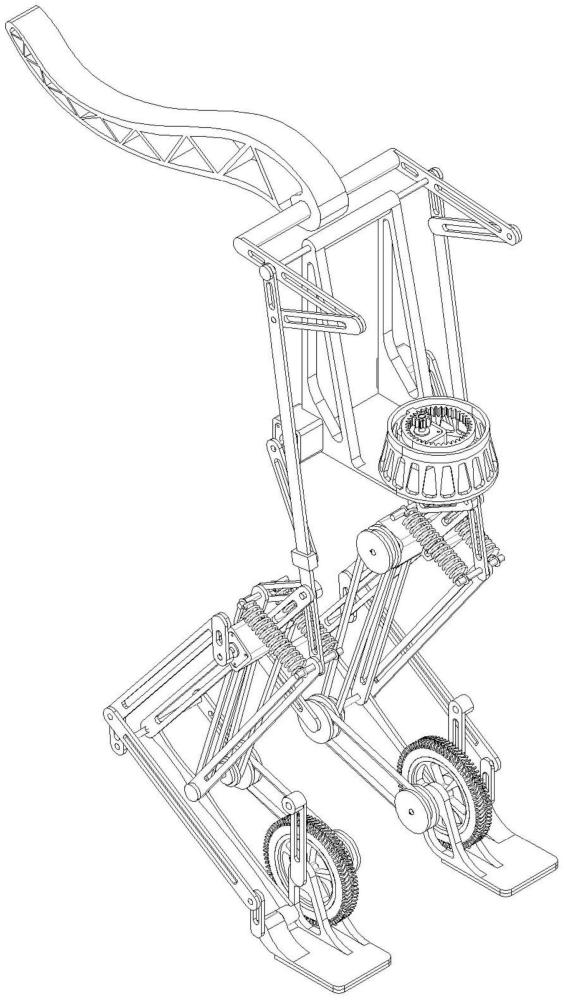
1、针对现有技术的不足,为解决机器人无法在保证轮式运动的同时,还能实现稳定的跳跃运动的问题,本实用新型提供了一种轮腿式仿袋鼠跳跃机器人,具有轮腿切换、连续跳跃的效果,包括若干个腿部模块、尾部模块和上身模块,所述腿部模块包括依次连接的大腿组件、小腿组件和脚部组件;
2、所述大腿组件包括大腿,大腿上套设有滑块,滑块内侧设置曲柄与大腿驱动电机连接,大腿下端设置转轴与小腿组件转动连接;
3、所述小腿组件包括小腿和储能机构,储能机构上端与大腿转动连接,储能机构设置拉伸弹簧与小腿连接,小腿上端与大腿的下端转动连接;小腿和储能机构的下端与脚部组件转动连接;
4、所述脚部组件包括脚掌,脚掌与小腿和储能机构下端转动连接,脚掌下端可转动地设置有脚趾,脚趾上表面可转动地设置有转轮;
5、所述腿部模块的内侧设置有车轮传动机构;所述腿部模块的外侧设置有翻转机构。
6、进一步地,所述腿部模块上端与所述上身模块转动连接,上身模块包括机架,机架上设置有回转台,所述大腿驱动电机固定设置在机架上。
7、进一步地,所述腿部模块上端与所述尾部模块固定连接,尾部模块包括尾巴和尾巴连杆,尾巴连杆固定设置在大腿上端,尾巴连杆与尾巴转动连接。
8、进一步地,所述储能机构为首尾依次连接的四连杆结构。
9、进一步地,所述车轮传动机构包括车轮驱动电机、第一带轮、第二带轮和双联带轮,车轮驱动电机内侧设置所述第一带轮,第一带轮与双联带轮套设皮带传动,第二带轮设置轮轴连接转轮,第二带轮与双联带轮套设弹性皮带传动。
10、作为一种优选方案,所述车轮驱动电机固定设置在储能机构内侧,所述双联带轮可转动地设置在小腿与脚掌连接的转轴的内侧,所述第二带轮设置在转轮内侧。
11、进一步地,所述翻转机构包括翻转驱动电机、第一传动机构和第二传动机构,所述第一传动机构上端与翻转驱动电机连接,第二传动机构下端可转动地连接脚趾,所述第一传动机构下端和第二传动机构上端转动连接。
12、作为一种优选方案,所述翻转驱动电机设置在储能机构外侧,所述第一传动机构下端和第二传动机构上端可转动地设置在车轮传动机构与脚掌连接的转轴的外侧,第二传动机构下端可转动地设置在脚趾外侧。
13、作为一种优选方案,所述转轮套设有轮胎,所述脚趾下表面设置橡胶垫片。
14、作为一种优选方案,所述腿部模块和所述尾部模块的杆件的非连接处设置镂空。
15、本实用新型有益效果在于:
16、1.本实用新型引入弹簧储能机构,使弹簧的变形方向和储能机构释放能量时力的方向互相垂直,使机器人具有非线性变化的跳跃力、稳定的起跳姿态,较好地保证机器人不发生提前起跳,并且在跳跃时保持较高的能量转化效率。
17、2.本实用新型引入尾部机构,通过其上下摆动调节机器人的姿态,保持平衡。并通过在脚趾底部加装橡胶垫片减小落地冲击。
18、3.本实用新型具有在轮式运动和跳跃运动两种运动模式下随时切换的功能。结合了轮式运动速度快耗能少和跳跃运动越障能力强的优点,扩大了机器人的活动范围,提高了机器人的地形适应能力。可应用于军事侦察、农业、星际探索等具有复杂崎岖地形特征的场景中。
19、4.本实用新型引入连杆机构将翻转驱动电机提升至靠近膝关节的位置,通过带传动将车轮驱动电机提升至靠近膝关节的位置,减少腿部惯量。通过零件的镂空设计减小机器人的质量。
技术特征:
1.一种轮腿式仿袋鼠跳跃机器人,包括若干个腿部模块、尾部模块和上身模块,所述腿部模块包括依次连接的大腿组件、小腿组件和脚部组件,
2.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述腿部模块上端与所述上身模块转动连接,上身模块包括机架(18),机架(18)上设置有回转台(19),所述大腿驱动电机(2)固定设置在机架(18)上。
3.根据权利要求2所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述腿部模块上端与所述尾部模块固定连接,尾部模块包括尾巴(16)和尾巴连杆(17),尾巴连杆(17)固定设置在大腿(1)上端,尾巴连杆(17)与尾巴(16)转动连接。
4.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述储能机构(10)为首尾依次连接的四连杆结构。
5.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述车轮传动机构(5)包括车轮驱动电机(5-1)、第一带轮(5-2)、第二带轮(5-6)和双联带轮(5-3),车轮驱动电机(5-1)内侧设置所述第一带轮(5-2),第一带轮(5-2)与双联带轮(5-3)套设皮带(5-5)传动,第二带轮(5-6)设置轮轴(5-7)连接转轮(15),第二带轮(5-6)与双联带轮(5-3)套设弹性皮带(5-4)传动。
6.根据权利要求5所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述车轮驱动电机(5-1)固定设置在储能机构(10)内侧,所述双联带轮(5-3)可转动地设置在小腿(4)与脚掌(13)连接的转轴的内侧,所述第二带轮(5-6)设置在转轮(15)内侧。
7.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述翻转机构(12)包括翻转驱动电机(12-1)、第一传动机构(12-2)和第二传动机构(12-3),所述第一传动机构(12-2)上端与翻转驱动电机(12-1)连接,第二传动机构(12-3)下端可转动地连接脚趾(6),所述第一传动机构(12-2)下端和第二传动机构(12-3)上端转动连接。
8.根据权利要求7所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述翻转驱动电机(12-1)设置在储能机构(10)外侧,所述第一传动机构(12-2)下端和第二传动机构(12-3)上端可转动地设置在车轮传动机构(5)与脚掌(13)连接的转轴的外侧,第二传动机构(12-3)下端可转动地设置在脚趾(6)外侧。
9.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述转轮(15)套设有轮胎(14),所述脚趾(6)下表面设置橡胶垫片(7)。
10.根据权利要求1所述的轮腿式仿袋鼠跳跃机器人,其特征在于,所述腿部模块和所述尾部模块的杆件的非连接处设置镂空。
技术总结
本技术提供一种轮腿式仿袋鼠跳跃机器人,包括若干个腿部模块、尾部模块和上身模块,腿部模块包括依次连接的大腿组件、小腿组件和脚部组件,大腿下端设置转轴与小腿组件转动连接;小腿组件包括小腿和储能机构,储能机构设置拉伸弹簧与小腿连接;小腿和储能机构的下端与脚部组件转动连接;脚部组件包括脚掌,脚掌下端可转动地设置有脚趾,脚趾上表面可转动地设置有转轮。腿部模块的内侧设置有车轮传动机构;腿部模块的外侧设置有翻转机构。本技术的有益效果在于:具有在轮式运动和跳跃运动两种运动模式下随时切换的功能。结合了轮式运动速度快耗能少和跳跃运动越障能力强的优点,扩大了机器人的活动范围,提高了机器人的地形适应能力。
技术研发人员:张振中,王秉铨,黄琼,周睿
受保护的技术使用者:山东建筑大学
技术研发日:20230719
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!