一种行走底盘装置和托盘搬运机器人的制作方法
本技术涉及搬运机器人,尤其涉及一种行走底盘装置和托盘搬运机器人。
背景技术:
1、搬运机器人,特别是托盘搬运机器人通常包括行走底盘,行走底盘设有可伸缩的货叉,行走底盘通过货叉的伸出和缩回可将承载料箱的托盘转运至其上,然后,行走底盘再驮载料箱和托盘进行搬运作业。
2、相关技术中,通常会在行走底盘的两侧设置驱动轮悬挂,驱动轮悬挂沿行走底盘的前后方向设置,两端分别为驱动轮和万向轮,其中,驱动轮用于驱动行走底盘移动,万向轮用于方便行走底盘转向。
3、然而,上述方案中,左右两侧的驱动轮悬挂是固定在行走底盘上的,当行走底盘在不平整的路面行走时,容易发生其中一个驱动轮打滑的现象,即,现有行走底盘的路面通过性较差。
技术实现思路
1、针对上述技术问题的至少一个方面,本申请实施例提供了一种行走底盘装置和托盘搬运机器人,行走底盘装置通过设置可相对底盘本体弹性转动的驱动轮摆臂悬挂,保证了驱动轮摆臂悬挂中驱动轮的轮压,从而解决了行走底盘装置路面通过性较差的技术问题。
2、第一方面,本申请实施例提供一种行走底盘装置,所述行走底盘装置包括底盘本体和安装于所述底盘本体的驱动轮摆臂悬挂;所述驱动轮摆臂悬挂包括:
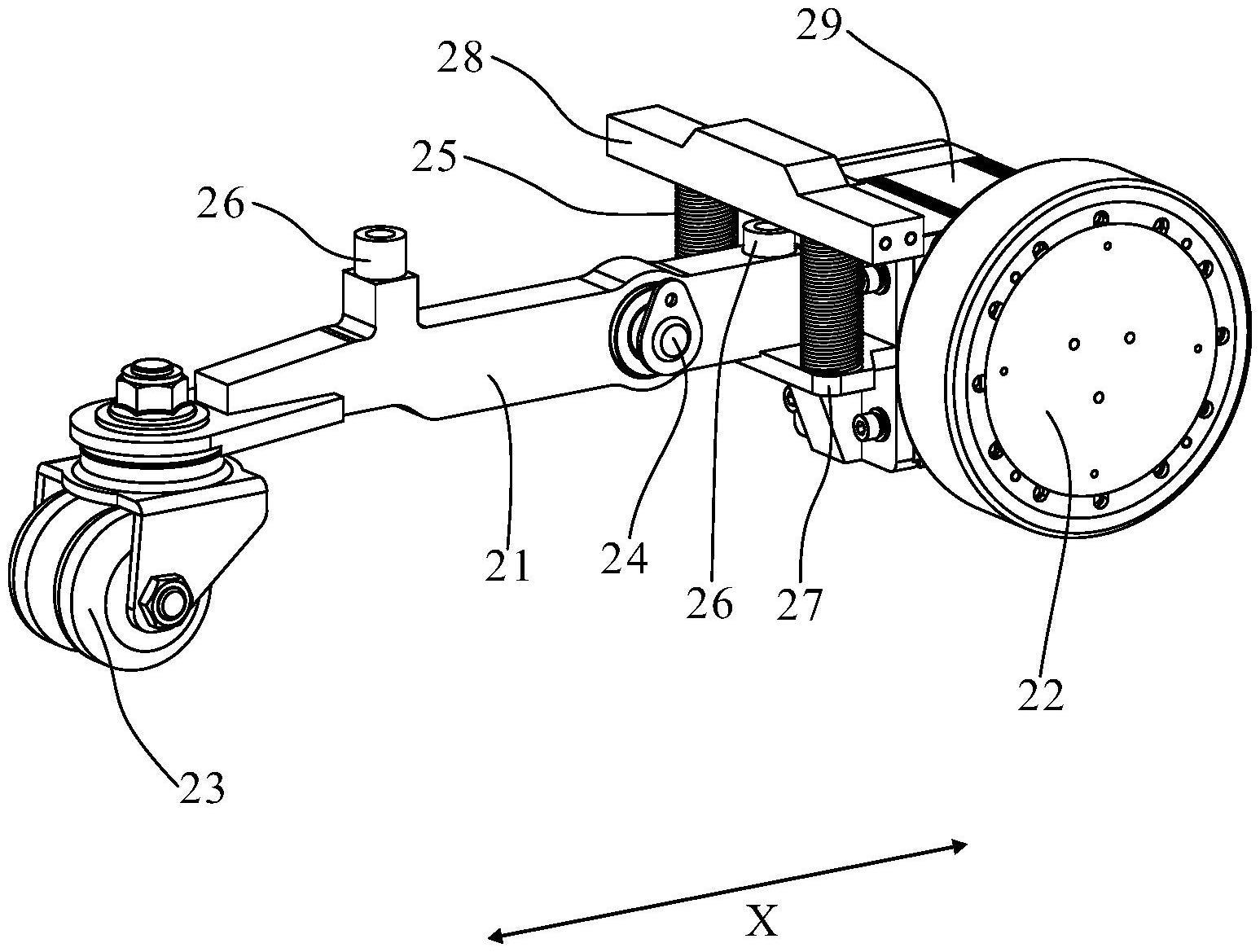
3、第一摆臂机构,沿第一方向延伸,所述第一方向为所述底盘本体的前后方向;
4、驱动轮,安装于所述第一摆臂机构沿所述第一方向的一端;
5、第一万向轮,安装于所述第一摆臂机构沿所述第一方向的另一端;
6、其中,所述驱动轮的转轴沿第二方向设置,所述第二方向为所述底盘本体的左右方向;
7、在所述驱动轮与所述第一万向轮之间的位置,所述第一摆臂机构贯穿有沿所述第二方向延伸的第一转接通孔,所述第一转接通孔插接有第一转接轴,所述第一转接轴的两端固定安装于所述底盘本体,以使所述第一摆臂机构以所述第一转接轴为转轴相对所述底盘本体转动;
8、并且,在靠近所述驱动轮的位置,所述第一摆臂机构与所述底盘本体之间设有弹性体,所述弹性体处于压缩状态。
9、在一实施例中,可选地,所述底盘本体相对所述第一方向的左右两侧分别安装有所述驱动轮摆臂悬挂;
10、其中,所述驱动轮位于所述底盘本体沿所述第一方向的中间位置,所述第一万向轮位于所述底盘本体沿所述第一方向的一端;
11、所述底盘本体沿所述第一方向的另一端安装有万向轮摆臂悬挂,所述万向轮摆臂悬挂沿所述第二方向的两端分别安装有第二万向轮。
12、在一实施例中,可选地,所述万向轮摆臂悬挂包括:
13、第二摆臂机构,沿所述第二方向延伸,所述第二摆臂机构沿所述第二方向的两端分别安装所述第二万向轮;
14、其中,在两端的所述第二万向轮之间的位置,所述第二摆臂机构贯穿有沿所述第一方向延伸的第二转接通孔,所述第二转接通孔插接有第二转接轴,所述第二转接轴的两端固定安装于所述底盘本体,以使所述第二摆臂机构以所述第二转接轴为转轴相对所述底盘本体转动。
15、在一实施例中,可选地,所述第二转接轴的两端通过转轴压板固定安装于所述底盘本体。
16、在一实施例中,可选地,所述第二摆臂机构沿所述第二方向的两端分别设有第二限位块,所述第二限位块位于所述第二摆臂机构的下端面,以使所述第二限位块用于抵接所述底盘本体。
17、在一实施例中,可选地,在所述第一转接通孔两侧的位置,所述底盘本体设有一对安装耳,所述安装耳用于固定安装所述第一转接轴。
18、在一实施例中,可选地,所述第一摆臂机构沿所述第一方向的两端分别设有第一限位块,所述第一限位块位于所述第一摆臂机构的上端面,以使所述第一限位块用于抵接所述底盘本体。
19、在一实施例中,可选地,所述驱动轮摆臂悬挂还包括驱动模块,所述驱动模块安装于所述第一摆臂机构沿所述第一方向的一端,所述驱动模块与所述驱动轮传动连接,所述驱动模块用于驱动所述驱动轮转动。
20、在一实施例中,可选地,所述底盘本体包括分体设置的第一底盘、第二底盘和第三底盘;
21、其中,所述第二底盘和所述第三底盘固定安装于所述第一底盘相对所述第一方向的左右两侧;
22、所述第一底盘用于安装所述万向轮摆臂悬挂;
23、所述第二底盘和所述第三底盘用于安装所述驱动轮摆臂悬挂;
24、所述第一底盘分别和所述第二底盘、所述第三底盘连接后用于安装伸缩货叉行走机构。
25、第二方面,基于上述的行走底盘装置,本申请实施例还提供一种托盘搬运机器人,所述托盘搬运机器人包括行走底盘装置,所述行走底盘装置为如上所述的行走底盘装置。
26、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
27、本申请实施例提供了一种行走底盘装置和托盘搬运机器人,行走底盘装置包括底盘本体和安装于底盘本体的驱动轮摆臂悬挂;该驱动轮摆臂悬挂包括第一摆臂机构,第一摆臂机构沿底盘本体的前后方向延伸,第一摆臂机构的两端分别安装驱动轮和第一万向轮;其中,在驱动轮与第一万向轮之间的位置,该第一摆臂机构通过第一转接轴可转动的安装于底盘本体;并且,在靠近驱动轮的位置,该第一摆臂机构与底盘本体之间还设有处于压缩状态的弹性体;这样,能够理解,当行走底盘装置在不平整的路面行走时,通过弹性体在原有压缩状态下的继续压缩或释放,会使驱动轮摆臂悬挂的驱动轮保持足够的轮压,防止出现驱动轮打滑的现象。
28、也就是说,本申请公开的行走底盘装置中,一方面,驱动轮摆臂悬挂通过第一转接轴可转动的安装于底盘本体,另一方面,驱动轮摆臂悬挂安装有驱动轮的一端通过弹性体与底盘本体连接;从而可使驱动轮摆臂悬挂安装有驱动轮的一端相对底盘本体上下弹性的摆动,这种上下弹性的摆动可使驱动轮与不平整的路面之间始终保持足够的压力,即轮压,防止驱动轮在不平整的路面行走时打滑,解决了现有的行走底盘装置路面通过性较差的技术问题。
技术特征:
1.一种行走底盘装置,其特征在于,所述行走底盘装置包括底盘本体(10)和安装于所述底盘本体(10)的驱动轮摆臂悬挂(20);所述驱动轮摆臂悬挂(20)包括:
2.根据权利要求1所述的行走底盘装置,其特征在于,所述底盘本体(10)相对所述第一方向的左右两侧分别安装有所述驱动轮摆臂悬挂(20);
3.根据权利要求2所述的行走底盘装置,其特征在于,所述万向轮摆臂悬挂(30)包括:
4.根据权利要求3所述的行走底盘装置,其特征在于,所述第二转接轴(33)的两端通过转轴压板(34)固定安装于所述底盘本体(10)。
5.根据权利要求3所述的行走底盘装置,其特征在于,所述第二摆臂机构(31)沿所述第二方向的两端分别设有第二限位块(35),所述第二限位块(35)位于所述第二摆臂机构(31)的下端面,以使所述第二限位块(35)用于抵接所述底盘本体(10)。
6.根据权利要求1所述的行走底盘装置,其特征在于,在所述第一转接通孔两侧的位置,所述底盘本体(10)设有一对安装耳(14),所述安装耳(14)用于固定安装所述第一转接轴(24)。
7.根据权利要求1所述的行走底盘装置,其特征在于,所述第一摆臂机构(21)沿所述第一方向的两端分别设有第一限位块(26),所述第一限位块(26)位于所述第一摆臂机构(21)的上端面,以使所述第一限位块(26)用于抵接所述底盘本体(10)。
8.根据权利要求1所述的行走底盘装置,其特征在于,所述驱动轮摆臂悬挂(20)还包括驱动模块(29),所述驱动模块(29)安装于所述第一摆臂机构(21)沿所述第一方向的一端,所述驱动模块(29)与所述驱动轮(22)传动连接,所述驱动模块(29)用于驱动所述驱动轮(22)转动。
9.根据权利要求2所述的行走底盘装置,其特征在于,所述底盘本体(10)包括分体设置的第一底盘(11)、第二底盘(12)和第三底盘(13);
10.一种托盘搬运机器人,其特征在于,所述托盘搬运机器人包括行走底盘装置,所述行走底盘装置为如权利要求1~9中任一项所述的行走底盘装置。
技术总结
本申请公开了一种行走底盘装置和托盘搬运机器人,行走底盘装置包括底盘本体和驱动轮摆臂悬挂;该驱动轮摆臂悬挂包括第一摆臂机构,第一摆臂机构沿底盘本体的前后方向延伸,第一摆臂机构的两端分别安装驱动轮和第一万向轮;其中,在驱动轮与第一万向轮之间的位置,该第一摆臂机构通过第一转接轴可转动的安装于底盘本体;并且,在靠近驱动轮的位置,该第一摆臂机构与底盘本体之间还设有处于压缩状态的弹性体;这样,能够理解,当行走底盘装置在不平整的路面行走时,通过弹性体在原有压缩状态下的继续压缩或释放,会使驱动轮摆臂悬挂的驱动轮保持足够的轮压,防止出现驱动轮打滑的现象,解决了现有的行走底盘装置路面通过性较差的技术问题。
技术研发人员:张云龙,李琳骁,李斐,郭凯文
受保护的技术使用者:杭州海康机器人股份有限公司
技术研发日:20230721
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!