一种轮腿式机器人
本技术涉及机器人,尤其涉及一种轮腿式机器人。
背景技术:
1、随着智能化时代的到来,机器人产业不断发展壮大。智能机器人在物流运输、工业制造、日常生活等各领域得到广泛应用,成为人们生产和生活的重要助手。移动机器人根据结构不同可分为轮式、腿式、蠕动式机器人和游动式机器人等等。
2、例如,专利cn 206243252 u公开了一种可分离的轮式机器人,其在需要机器人移动时,将机器人主体放置在轮式底座上,便成为了轮式机器人。当不需要机器人移动时,可以将机器人主体取下,放置于桌面或其他平面上,成为桌面机器人。然而,该专利中的机器人仅通过转轮实现移动,越障性能相对较差,亟需开发一种复合式移动机器人,以能够根据外界环境灵活调整自身的运动姿态,从而集成快速性、平稳性和高越障性。
技术实现思路
1、有鉴于此,有必要提供一种轮腿式机器人,用以解决现有技术中的机器人仅通过转轮实现移动,越障性能相对较差,亟需开发一种复合式移动机器人,以能够根据外界环境灵活调整自身的运动姿态,从而集成快速性、平稳性和高越障性的技术问题。
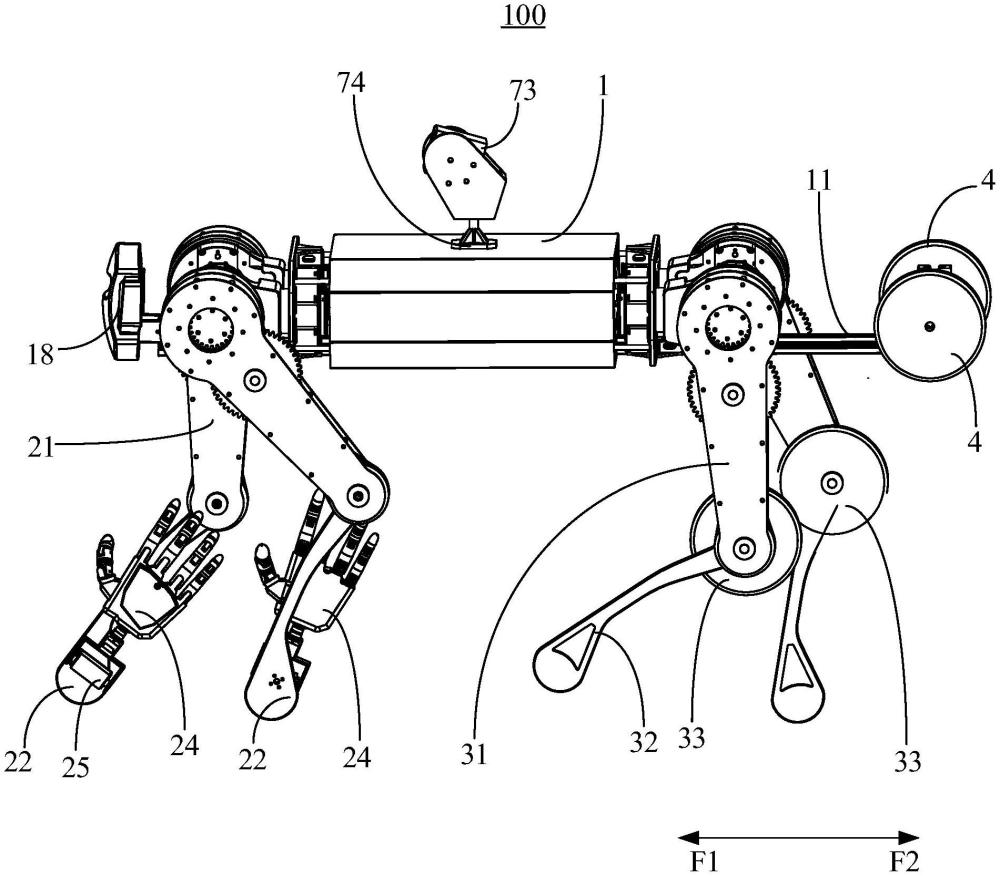
2、本实用新型提供一种轮腿式机器人,该轮腿式机器人包括:
3、躯体;
4、主动轮,转动连接所述躯体;
5、两个前腿,间隔设于所述躯体的前端,所述前腿转动连接所述躯体;
6、两个后腿,间隔设于所述躯体的后端,所述后腿转动连接所述躯体,所述前腿、后腿及主动轮的转动轴线相互平行,所述前腿及所述后腿能够通过转动使得所述躯体经所述主动轮支撑于地面,以及能够驱使所述主动轮脱离地面;
7、驱动结构,包括前腿驱动部、后腿驱动部及主动轮驱动部,所述前腿驱动部设于所述前腿与所述躯体之间,用以驱动所述前腿相对所述躯体转动,所述后腿驱动部设于所述后腿与所述躯体之间,用以驱动所述后腿相对所述躯体转动,所述主动轮驱动部设于所述躯体与所述主动轮之间,用以驱动所述主动轮绕位于所述躯体横向上的轴线转动,以使得所述主动轮能够带动所述躯体移动。
8、可选地,各所述后腿包括:
9、后大腿,一端转动连接于所述躯体,使得所述躯体能够在接触地面及脱离地面之间切换;
10、后小腿,一端转动连接于所述后大腿,使得其另一端具有转动至支撑于地面的行走位置,且具有转动至靠近所述躯体以脱离地面的避让位置;以及,
11、从动轮,设于所述后大腿靠近所述后小腿的一端,用以在所述后小腿处于所述行走位置时脱离地面,并在所述后小腿处于所述避让位置时支撑于地面;
12、其中,所述后腿驱动部包括后大腿驱动部及后小腿驱动部,所述后大腿驱动部设于所述后大腿与所述躯体之间,用以驱动所述后大腿相对所述躯体转动,所述后小腿驱动部设于所述后小腿与所述后大腿之间,用以驱动所述后小腿相对所述后大腿转动。
13、可选地,所述躯体的后端朝后延伸设有连接臂,所述连接臂远离所述躯体的一端连接有安装臂,所述安装臂沿所述躯体的横向延伸;
14、所述主动轮设有两个,两个所述主动轮分别设于所述安装臂延伸方向上的两端,所述主动轮驱动部对应设有两个,各所述主动轮驱动部设于对应的所述主动轮与所述安装臂之间。
15、可选地,所述后大腿包括两个后大腿臂,两个所述后大腿臂沿所述躯体的横向间隔设置、并对应转动连接于所述躯体,其中,所述后大腿驱动部设于所述后大腿臂与所述躯体之间;
16、所述后小腿驱动部包括后驱动电机、后传动带及两个后同步带轮,两个所述后同步带轮设于两个所述后大腿臂之间,且沿所述后大腿臂的长度方向间隔设置,所述后传动带设于两个所述后同步带轮之间,且所述后小腿转动连接于一个所述后同步带轮,所述后驱动电机驱动连接于另一所述后同步带轮。
17、可选地,所述躯体包括:
18、主躯干;
19、两个前肩,设于所述主躯干的前端、并沿所述主躯干的横向间隔设置,各所述前肩能够绕位于前后向上的轴线转动,且两个所述前肩与两个所述前腿一一对应,其中,所述前腿驱动部设于所述前腿与对应的所述前肩之间;
20、两个后肩,设于所述主躯干的后端、并沿所述主躯干的横向间隔设置,各所述后肩能够绕位于前后向上的轴线转动,且两个所述后肩与两个所述后腿一一对应,其中,所述后腿驱动部设于所述后腿与对应的所述后肩之间;
21、前肩驱动部,设于所述前肩与所述主躯干之间,用以驱动所述前肩绕位于前后向上的轴线转动;以及,
22、后肩驱动部,设于所述后肩与所述主躯干之间,用以驱动所述后肩绕位于前后向上的轴线转动。
23、可选地,所述前腿对应所述前腿驱动部设有前防护架,所述前防护架罩设于对应的所述前腿驱动部;
24、所述后腿对应所述后腿驱动部设有后防护架,所述后防护架罩设于对应的所述后腿驱动部。
25、可选地,所述前腿包括前大腿及前小腿,所述前大腿一端连接于所述躯体、并能够绕位于所述躯体横向上的轴线转动,所述前小腿一端连接于所述前大腿、并能够绕位于所述躯体横向上的轴线转动;
26、所述前腿驱动部包括前大腿驱动部及前小腿驱动部,所述前大腿驱动部设于所述前大腿与所述躯体之间,用以驱动所述前大腿绕位于所述躯体横向上的轴线转动,所述前小腿驱动部设于所述前小腿与所述前大腿之间,用以驱动所述前小腿绕位于所述躯体横向上的轴线转动。
27、可选地,所述前大腿包括两个前大腿臂,两个所述前大腿臂沿所述躯体的横向间隔设置、并对应转动连接于所述躯体,其中,所述前大腿驱动部设于所述前大腿臂与所述躯体之间;
28、所述前小腿驱动部包括前驱动电机、前传动带及两个前同步带轮,两个所述前同步带轮设于两个所述前大腿臂之间,且沿所述前大腿臂的长度方向间隔设置,所述前传动带设于两个所述前同步带轮之间,且所述前小腿转动连接于一个所述前同步带轮,所述前驱动电机驱动连接于另一所述前同步带轮。
29、可选地,所述前小腿远离所述前大腿的一端还设有机械手,所述机械手能够绕位于所述前小腿宽度方向上的轴线转动,以具有远离所述前小腿的工作位置,与靠近所述前小腿的收起位置;
30、所述轮腿式机器人还包括机械手驱动部,所述机械手驱动部设于所述机械手与所述前小腿之间,用以驱动所述机械手对应转动。
31、可选地,所述前腿和/或所述后腿远离所述躯体的一端设有防滑垫片。
32、与现有技术相比,本实用新型提供的轮腿式机器人中,在后腿转动至使躯体处于站立姿态时,主动轮支撑于地面、并使得前腿及后腿脱离地面,以能够通过主动轮驱动部驱使主动轮转动,进而带动躯体活动,此时轮腿式机器人通过主动轮移动,以具有快速性及平稳性。而在后腿转动致使躯体处于爬行姿态时,主动轮脱离地面,且前腿及后腿着地,此时能够通过前腿及后腿进行爬行,提高了轮腿式机器人的越障性,且本方案中的轮腿式机器人在轮式及腿式之间能够快速切换,运动姿态调整相对灵活,提高了普适性。
33、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以本实用新型的较佳实施例并配合附图详细说明如下。本实用新型的具体实施方式由以下实施例及其附图详细给出。
- 还没有人留言评论。精彩留言会获得点赞!