一种AMR自主移动机器人
本发明涉及机器人,具体是一种amr自主移动机器人。
背景技术:
1、机器人是自动执行工作的机器装置,机器人可接受人类指挥,也可以执行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,机器人执行的是取代或是协助人类工作的工作,例如制造业、建筑业,或是危险的工作,机器人可以是高级整合控制论、机械电子、计算机、材料和仿生学的产物,机器人是靠自身动力和控制能力来实现各种功能的一种机器,机器人能力的评价标准包括:智能,指感觉和感知,包括记忆、运算、比较、鉴别、判断、决策、学习和逻辑推理等;机能,指变通性、通用性或空间占有性等;物理能,指力、速度、连续运行能力、可靠性、联用性、寿命等,因此,可以说机器人是具有生物功能的空间三维坐标机器,而amr移动机器人,一般为轮式或类人机器人,携带各种传感器,通过编程实现自主移动,在制造业、仓储业、物流业、医疗保健、智慧城市和公共部门等领域中通常会使用到amr自主移动机器人,由此,amr自主移动机器人在相应的工作需求下应运而生;amr是一种工业机器人,可以在您的设施内提升和运输托盘等物料,就目前制造业、仓储业、物流业、医疗保健、智慧城市和公共部门等领域对amr自主移动机器人工作的需求,如何更好的结合好amr自主移动机器人,通过在未知环境下利用amr自主移动机器人对未知环境中周围的状况进行实时监测,来解决人工探测存在的安全问题,是亟需解决的问题,基于此,我们提出一种amr自主移动机器人。
技术实现思路
1、本发明的目的在于提供一种amr自主移动机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
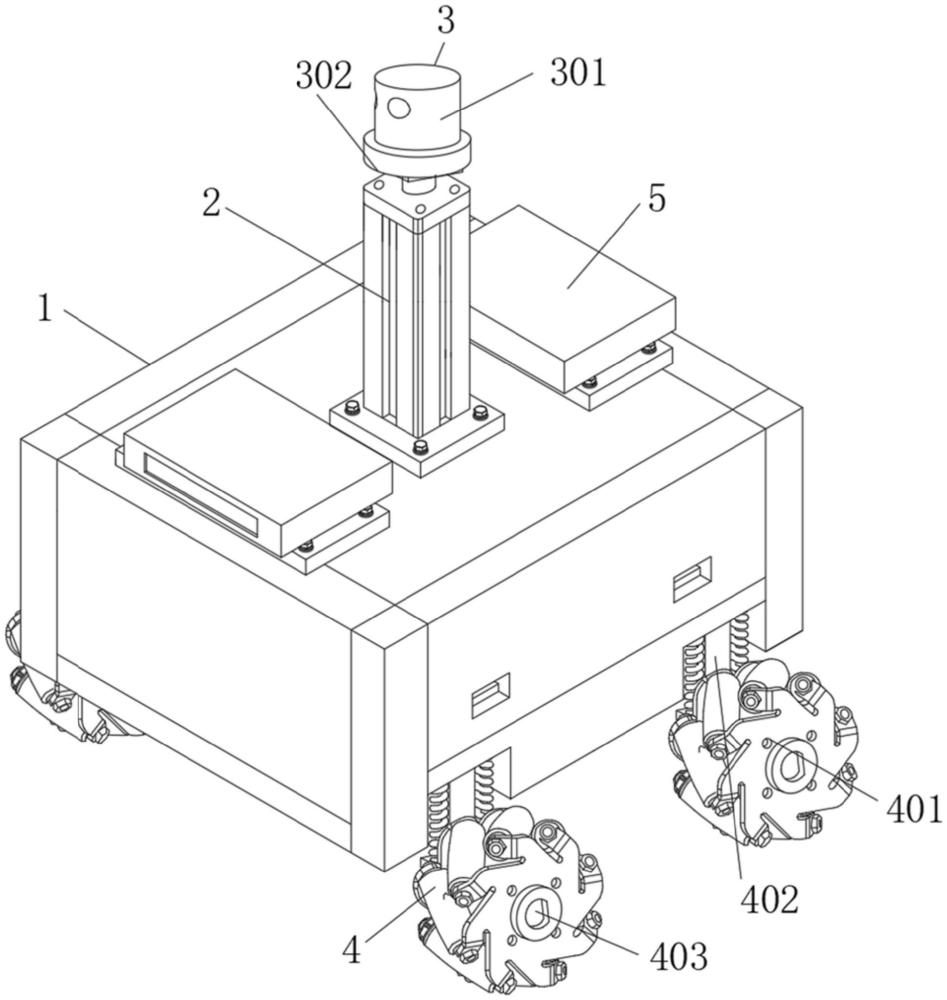
3、所述amr自主移动机器人包括移动机器人外壳,所述移动机器人外壳顶部固定安装有高度调节机构,所述移动机器人外壳顶部两侧对称固定安装有两个sick安全激光扫描仪,所述高度调节机构的顶端设置有激光雷达结构,所述移动机器人外壳底部对称设置有四个移动机构。
4、所述激光雷达结构包括激光雷达和激光雷达支架,所述激光雷达支架固定连接于高度调节机构的伸缩端,所述激光雷达固定安装于激光雷达支架顶部。
5、所述移动机构包括麦克纳姆轮、弹性悬架、驱动轴、带编码器的轮毂电机,所述移动机器人外壳的内侧设置有控制机构。
6、所述弹性悬架固定安装于移动机器人外壳底部,所述驱动轴转动连接于弹性悬架的下部。
7、所述麦克纳姆轮固定套设于驱动轴的外侧,所述带编码器的轮毂电机固定安装于弹性悬架上,所述驱动轴的一端与带编码器的轮毂电机的转动端固定连接。
8、与现有技术相比,本发明的有益效果是:本发明amr自主移动机器人通过采用麦克纳姆轮驱动的万向行走装置可以灵活运动,有效减少由于转向而与障碍物的刮碰情况,此外,为四轮分别加上弹性悬架,有效提升其工作稳定性和越障能力,进而有效解决了在未知环境下,在一些复杂狭窄的路段行走出现故障的问题。
技术特征:
1.一种amr自主移动机器人,其特征在于:所述amr自主移动机器人包括移动机器人外壳(1),所述移动机器人外壳(1)顶部固定安装有高度调节机构(2),所述移动机器人外壳(1)顶部两侧对称固定安装有两个sick安全激光扫描仪(5),所述高度调节机构(2)的顶端设置有激光雷达结构(3),所述移动机器人外壳(1)底部对称设置有四个移动机构(4)。
2.根据权利要求1所述的amr自主移动机器人,其特征在于:所述激光雷达结构(3)包括激光雷达(301)和激光雷达支架(302),所述激光雷达支架(302)固定连接于高度调节机构(2)的伸缩端,所述激光雷达(301)固定安装于激光雷达支架(302)顶部。
3.根据权利要求1所述的amr自主移动机器人,其特征在于:所述移动机构(4)包括麦克纳姆轮(401)、弹性悬架(402)、驱动轴(403)、带编码器的轮毂电机(404),所述移动机器人外壳(1)的内侧设置有控制机构(6)。
4.根据权利要求3所述的amr自主移动机器人,其特征在于:所述弹性悬架(402)固定安装于移动机器人外壳(1)底部,所述驱动轴(403)转动连接于弹性悬架(402)的下部。
5.根据权利要求3所述的amr自主移动机器人,其特征在于:所述麦克纳姆轮(401)固定套设于驱动轴(403)的外侧,所述带编码器的轮毂电机(404)固定安装于弹性悬架(402)上,所述驱动轴(403)的一端与带编码器的轮毂电机(404)的转动端固定连接。
技术总结
本发明涉及机器人技术领域,具体是一种AMR自主移动机器人;所述AMR自主移动机器人包括移动机器人外壳,所述移动机器人外壳顶部固定安装有高度调节机构,所述移动机器人外壳顶部两侧对称固定安装有两个SICK安全激光扫描仪,所述高度调节机构的顶端设置有激光雷达结构,所述移动机器人外壳底部对称设置有四个移动机构;本发明AMR自主移动机器人通过采用麦克纳姆轮驱动的万向行走装置可以灵活运动,有效减少由于转向而与障碍物的刮碰情况,此外,为四轮分别加上弹性悬架,有效提升其工作稳定性和越障能力,进而有效解决了在未知环境下,在一些复杂狭窄的路段行走出现故障的问题。
技术研发人员:孙涛,徐勇军,李檬,周佳杰,黄争艳,王亚芳,邓小艳
受保护的技术使用者:广东工贸职业技术学院
技术研发日:20230804
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!