一种用于塔筒的多功能爬升机器人的制作方法
本技术涉及风力发电,尤其是一种用于塔筒的多功能爬升机器人。
背景技术:
1、随着风力发电工程日益蓬勃,更多的风电塔接踵而至,而对于这种大型塔筒结构的维护和清洁较为困难。传统的人工清洁,探伤,维护等操作,由于其效率低下和极低的安全系数,有着被淘汰的趋势,所以塔筒爬升机器人也就应运而生;
2、现有的爬升机器人,锁定能力不强,不能在任意位置进行悬停。
3、为此,我们提出一种用于塔筒的多功能爬升机器人。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供一种用于塔筒的多功能爬升机器人,两个爬升组件整体呈弧形设置,使得机器人沿着弧形路径进行旋转移动,机器人的运动轨迹为连续运动轨迹,爬升速度更快,且机器人连续螺旋升降,能够悬停在任意期望高度;支撑杆与地面之间夹锐角,使得电动机进行自锁时,只需要抵抗机器人重力沿支撑杆的分力,而不是全部的重力,使得电动机的自锁更加省力、稳定。
2、本实用新型所采用的技术方案如下:
3、一种用于塔筒的多功能爬升机器人,包括:
4、支撑塔盘;
5、至少三组爬升机构,每组爬升机构包括两个爬升组件,且两个爬升组件分别设置在支撑塔盘的两侧,两个爬升组件总体呈弧形,爬升组件包括:
6、支撑杆,转动设置在支撑塔盘上,支撑杆与地面之间夹锐角;
7、弹簧,用于连接支撑杆和支撑塔盘,弹簧处于收缩状态;
8、动力组件设置在支撑杆的末端,用于提供沿支撑杆的动力,且能够自锁;
9、爬升轮,通过动力组件驱动爬升轮转动而带动机器人螺旋升降;
10、工作机构,安装在支撑塔盘上,通过在工作机构上安装配件进行工作。
11、其进一步特征在于:
12、还包括滑轨机构,滑轨机构包括外轨和内轨,外轨设置在支撑塔盘的内侧,内轨滑动设置在外轨上,内轨上设置有驱动组件,用于驱动内轨在外轨上滑动,内轨上还设置有能够伸缩的第二延伸臂。
13、所述爬升组件还包括悬挂组件和传动组件,爬升轮设置有两个,两个爬升轮通过两个传动组件与动力组件连接;悬挂组件安装在动力组件上,并与传动组件连接,使得两个爬升轮都能够与塔筒壁接触。
14、所述动力组件为电动机,传动组件为万向节。
15、所述工作机构包括工作盘,工作盘上安装有能够伸缩的第一延伸臂。
16、所述支撑塔盘由多个等宽圆环组成。
17、所述外轨由多段组合而成,且组成后呈圆形,驱动组件可以为驱动马达。
18、所述第一延伸臂和第二延伸臂上都能够安装各种配件,用于完成不同的工作。
19、本实用新型的有益效果如下:
20、本实用新型结构紧凑、合理,操作方便,两个爬升组件整体呈弧形设置,使得机器人沿着弧形路径进行旋转移动,机器人的运动轨迹为连续运动轨迹,爬升速度更快,且机器人连续螺旋升降,能够悬停在任意期望高度;支撑杆与地面之间夹锐角,使得电动机进行自锁时,只需要抵抗机器人重力沿支撑杆的分力,而不是全部的重力,使得电动机的自锁更加省力、稳定。
21、同时,本实用新型还具备如下优点:
22、(1)在机器人悬停后,驱动组件通过内轨带动第二延伸臂转动,通过第二延伸臂的配件进行工作,且第二延伸臂能够随着内轨沿着外轨做圆周运动,进而使得第二延伸臂上的配件能够绕着塔筒壁的一周进行工作,便于对塔筒壁一周进行工作或者检查。
23、(2)工作机构包括工作盘,工作盘上安装有第一延伸臂,通过在第一延伸臂上安装毛刷、水枪、喷雾等配件来进行工作,工作盘上开设有安装孔,通过安装孔安装第一延伸臂,通过在工作盘上开设安装孔的数量来确定安装第一延伸臂的数量,能够实现多种功能的工作。
24、(3)弹簧连接支撑杆和支撑塔盘,且弹簧处于收缩状态,通过弹簧拉紧支撑杆,弹簧为氮气弹簧,便于增加爬升轮和塔筒壁之间的摩擦力。
技术特征:
1.一种用于塔筒的多功能爬升机器人,其特征在于,包括:
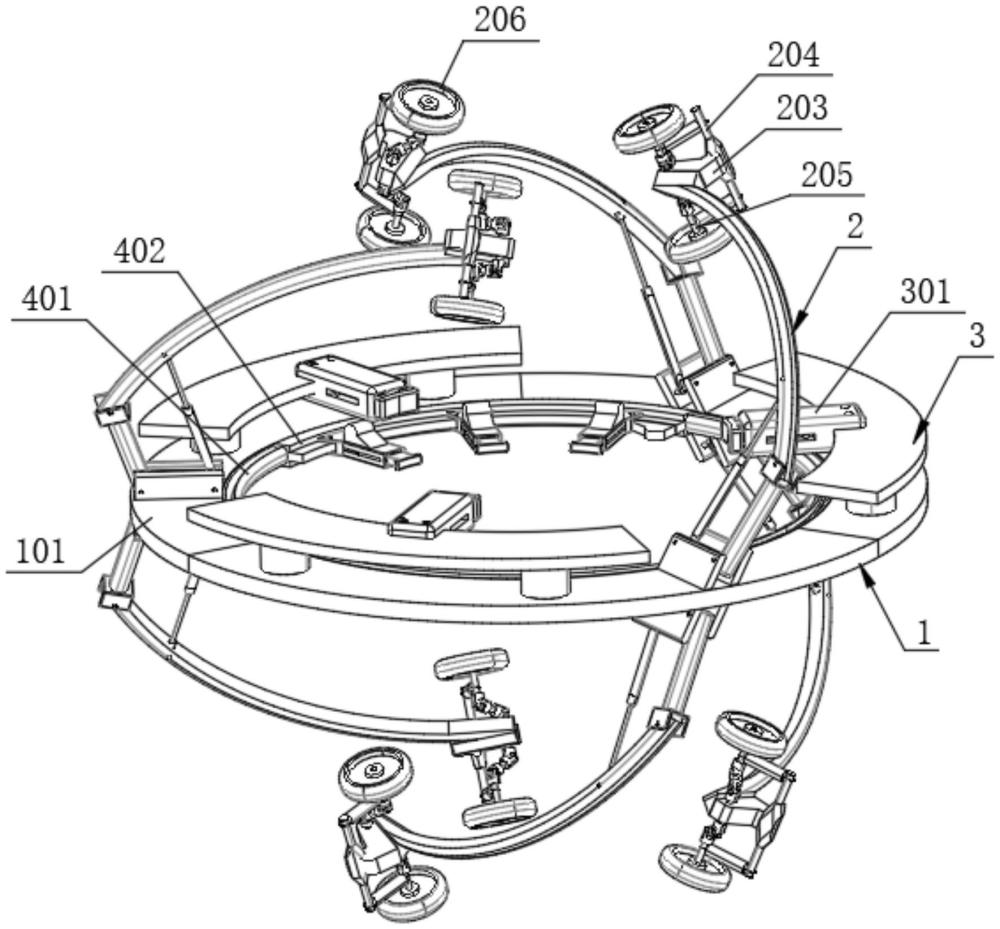
2.如权利要求1所述的一种用于塔筒的多功能爬升机器人,其特征在于:还包括滑轨机构,滑轨机构包括外轨(401)和内轨(402),外轨(401)设置在支撑塔盘(1)的内侧,内轨(402)滑动设置在外轨(401)上,内轨(402)上设置有驱动组件(403),用于驱动内轨(402)在外轨(401)上滑动,内轨(402)上还设置有能够伸缩的第二延伸臂(404)。
3.如权利要求1所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述爬升组件(2)还包括悬挂组件(204)和传动组件(205),爬升轮(206)设置有两个,两个爬升轮(206)通过两个传动组件(205)与动力组件(203)连接;悬挂组件(204)安装在动力组件(203)上,并与传动组件(205)连接,使得两个爬升轮(206)都能够与塔筒壁接触。
4.如权利要求3所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述动力组件(203)为电动机,传动组件(205)为万向节。
5.如权利要求2所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述工作机构包括工作盘(3),工作盘(3)上安装有能够伸缩的第一延伸臂(301)。
6.如权利要求1所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述支撑塔盘(1)由多个等宽圆环(101)组成。
7.如权利要求2所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述外轨(401)由多段组合而成,且组成后呈圆形,驱动组件(403)可以为驱动马达。
8.如权利要求5所述的一种用于塔筒的多功能爬升机器人,其特征在于:所述第一延伸臂(301)和第二延伸臂(404)上都能够安装各种配件,用于完成不同的工作。
技术总结
一种用于塔筒的多功能爬升机器人,包括支撑塔盘;至少三组爬升机构,每组爬升机构包括两个爬升组件,且两个爬升组件分别设置在支撑塔盘的两侧,两个爬升组件总体呈弧形,爬升组件包括:支撑杆,转动设置在支撑塔盘上,支撑杆与地面之间夹锐角;弹簧;动力组件设置在支撑杆的末端,用于提供沿支撑杆的动力,且能够自锁;爬升轮,通过动力组件驱动爬升轮转动而带动机器人螺旋升降;工作机构。本技术两个爬升组件整体呈弧形设置,使得机器人连续螺旋升降,能够悬停在任意期望高度;支撑杆与地面之间夹锐角,使得电动机进行自锁时,只需要抵抗机器人重力沿支撑杆的分力,而不是全部的重力,使得电动机的自锁更加省力、稳定。
技术研发人员:宁萌,李富才,姜少伟,郑博文,邵莹,李建飞
受保护的技术使用者:江苏集萃复合材料装备研究所有限公司
技术研发日:20230901
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!