一种爬壁机器人的轮腿复合模组
本发明涉及机器人,更具体地,涉及一种爬壁机器人的轮腿复合模组。
背景技术:
1、爬壁机器人的研究始于对需要在垂直或近乎垂直表面上执行任务的需求。这可以包括在建筑维护、工业检查、救援任务或科学研究中的应用。传统的轮式机器人在这些环境中可能无法有效移动,因此需要开发一种能够爬升和附着于垂直表面的机器人技术。将轮子和腿部结合的设计能够克服传统轮式机器人的一些限制。轮子提供了快速移动的能力,而腿部系统使机器人能够适应不规则表面,并在需要时提供额外的支持和稳定性。这种设计使得机器人能够在不同的表面上移动,包括平坦表面和具有凹凸不平的表面。爬壁机器人的轮腿复合模组技术融合了多个学科的知识,从机械设计到控制系统,从材料科学到电子工程,以实现在垂直表面上灵活、高效移动的能力。
2、在一些特定环境下,存在着一些工作条件恶劣、危险的工作和任务,这些工作和任务由人类完成起来十分困难,工作小车、四足机器人等方案陆续被提出;为了使得工作小车、四足机器人能够在垂直平面上爬行,给工作小车、多足机器人加装吸附装置,如电磁吸附式、真空吸附式以及利用旋翼反推吸附,从而衍生得到履带式吸盘吸附攀爬车、旋翼式攀爬机器人、电磁吸附四足攀爬机器人等。然而,旋翼式攀爬机器人虽然可以在一定的高空工作,但存在噪音大、可靠性低的缺点,高空中风力等因素会对其造成影响;履带式吸盘吸附攀爬小车虽然能进行较为精准的运动路线规划,但其行动灵活性差,行动缓慢,效率低下,转弯困难,且越障能力差,只能在大平面上工作;电磁铁吸附四足攀爬机器人具有一定的越障能力,但其本身结构和电磁吸附结构都较为复杂,重量大,成本高,且当断电时整个机器人会因失去磁力而松脱坠落,造成损失和危险。
3、中国专利公开了一种多自由度攀爬机器人,包括回转组件、摆转组件、磁吸附组件,两组所述回转组件连接于摆转组件的两端,所述磁吸附组件与回转组件连接,所述磁吸附组件包括同轴设置的第一径向磁铁和第二径向磁铁,所述第一径向磁铁连接有驱动第一径向磁铁转动调整磁力大小的传动组件。上述永磁吸附双足攀爬机器人,能实现机器人在一定空间移动和翻越,,但是在大平面依靠双足爬行,存在着效率低的缺点,而且由于结构的局限性,机器人足部的抬升与落下效果不理想。
技术实现思路
1、本发明为克服上述现有技术中的缺陷,提供一种爬壁机器人的轮腿复合模组,能够实现轮式运动模式和足式运动模式的切换,提高了机器人的灵活性,从而能够在复杂的环境中运动,安全且高效。
2、为解决上述技术问题,本发明采用的技术方案是:
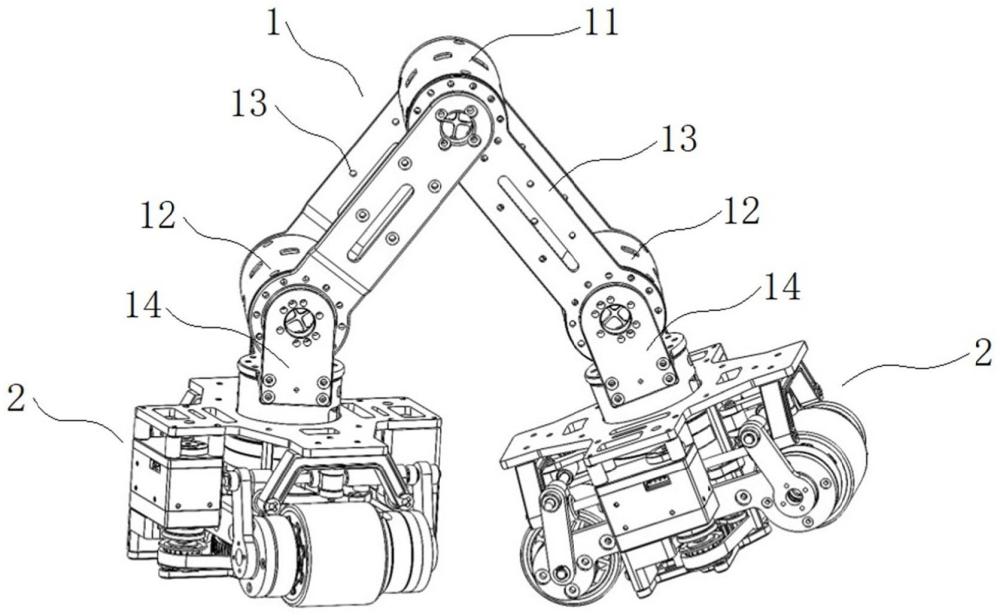
3、一种爬壁机器人的轮腿复合模组,包括关节摆转组件和轮腿复合组件,所述轮腿复合组件包括变磁力组件、至少两组轮驱组件、以及升降组件;所述轮驱组件包括基座和驱动轮组;所述升降组件安装在所述基座上,所述升降组件的输出端与所述驱动轮组连接,所述升降组件能够驱动所述驱动轮组相对所述基座上下移动;两组所述基座的一端分别安装在所述关节摆转组件的两端,所述变磁力组件安装在所述基座的另一端;所述变磁力组件包括第一传动组件、第一永磁组和第二永磁组;所述第一永磁组固定安装在所述基座上,所述第二永磁组旋转安装在所述基座上,所述第一传动组件的输出端与所述第二永磁组连接,驱动所述第二永磁组相对所述第一永磁组旋转以调整所述变磁力组件磁力的大小。升降组件安装在基座的上部,变磁力组件安装在基座的下部,这样变磁力组件能够直接与壁面接触。
4、根据以上技术方案,本发明提供的一种爬壁机器人的轮腿复合模组,通过升降组件改变驱动轮组与基座之间的距离,从而调整变磁力组件与壁面之间的距离。在使用时,轮腿复合组件与墙面接触,当轮驱组件向基座方向抬升,变磁力组件与墙面之间的距离将减小。同时,在变磁力组件中,通过第一传动组件引导第二永磁组旋转,改变磁通量的大小,进而灵活的调整轮腿复合模组与壁面之间的磁力水平,以满足轮腿复合模组在轮式运动模式和足式运动模式中对磁力变化的需求。
5、在轮式运动模式下,升降组件控制变磁力组件与壁面的间隙保持在一个定制,在这种状态下,通过控制驱动轮组和关节摆转组件,使轮腿复合模组实现轮式运动。通过对关节摆转组件的控制,使机器人具备适应壁面曲度的能力。在轮式运动模式下,变磁力组件直接与壁面接触,当机器人面临过渡障碍时,通过变磁力组件调整磁通量的大小,实现机器人足部的精准吸附和脱离。这种独特的运动方式不仅能够顺利应对内角障碍、外角障碍和法兰型障碍等多种情况,而且还展现了机器人在复杂环境中高效运动的优越性。这样的设计不仅提高了机器人在垂直表面上的适应性,而且拓展了其在各种应用场景中的潜在用途。
6、在其中一个实施例中,所述关节摆转组件包括第一摆转电机、第二摆转电机、第一连接板以及固定座;所述第二摆转电机、第一连接板和固定座均设有两组;两组所述第一连接板的一端分别与两组所述第二摆转电机固定连接,两组所述第二摆转电机的输出端分别与两组所述固定座连接,两组所述固定座分别安装在两组所述基座上;其中一组所述第一连接板的另一端与所述第一摆转电机固定连接,另一组所述第一连接板的另一端与所述第一摆转电机的输出端连接。通过控制第一摆转电机和第二摆转电机,能够改变两组第一连接板之间的夹角、以及基座与第一连接板之间的夹角。关节摆转组件以第一摆转电机为基准,两侧为对称结构。
7、在其中一个实施例中,所述固定座包括径向固定座和轴向固定座;所述轴向固定座的一端与所述第二摆转电机的输出端连接,所述轴向固定座的另一端与所述径向固定座固定连接,所述径向固定座固定安装在所述基座上。
8、在其中一个实施例中,所述升降组件包括第二传动组件、两组横向光轴、两组纵向光轴、转动环、直线轴承转动架、直线轴承移动架以及两组轮固定外板;所述轮驱组件包括驱动轮、从动轮以及轮连接板,所述轮连接板的一端与驱动轮转动连接,另一端与从动轮转动连接;所述第二传动组件以及所述转动环安装在所述基座上,所述第二传动组件的输出端与所述转动环连接,驱动所述转动环转动;两组所述横向光轴与所述基座固定连接,且位于所述转动环的左右两侧;两组所述纵向光轴位于所述转动环的另外两侧,两组所述纵向光轴的两端分别通过直线轴承移动架与两组所述横向光轴的滑动连接;每组所述纵向光轴均套设有一个直线轴承转动架,两组所述直线轴承转动架分别通过转动连接板与所述转动环连接;两组所述轮固定外板的一端分别与两组纵向光轴的一端连接,两组所述轮固定外板的另一端分别与轮连接板转动连接。两块连接板将驱动轮和从动轮夹持安装。转动环安装在基座上,并通过连接柱连接,以转动环为中心,纵向光轴、横向光轴对称安装在转动环的两侧,驱动轮和从动轮位于转动环下方的两侧,且位于第一永磁组和第二永磁组的两侧;使得整个结构更加紧凑。通过各部件之间的紧密配合,机器人能够在垂直表面上以轮腿复合的方式高效移动。该结构为机器人在复杂环境中执行任务提供了高度的稳定性和灵活性。
9、第二传动组件驱动转动环正向或逆向旋转,从而带动两侧的转动连接板移动,从而带动直线轴承转动架沿着纵向光轴来回移动,进而带动纵向光轴沿着横向光轴来回移动;当两组纵向光轴相向移动,驱动轮组被抬起,即向基座方向移动,与基座之间的距离减小;当两组纵向光轴逆向移动,驱动轮组则放下,即驱动轮组与基座之间的距离增大。
10、在其中一个实施例中,所述第二传动组件包括升降舵机、第一小带轮、以及第一同步带;所述升降舵机安装在所述基座上,所述升降舵机的输出端与所述第一小带轮连接,所述第一小带轮通过所述第一同步带与所述转动环连接。升降舵机通过法兰盘与第一小带轮连接,第一小带轮通过第一同步带与转动环连接,升降舵机启动,驱动第一小带轮转动,从而带动转动环转动。
11、在其中一个实施例中,所述转动环的上部分为齿轮,与所述同步带啮合,转动环的下部分通过所述转动连接板与所述直线轴承转动架连接;所述轮连接板的两端分别与驱动轮和从动轮的转轴转动连接;两组所述轮固定外板分别与驱动轮和从动轮的转轴转动连接。
12、在其中一个实施例中,所述第一永磁组包括下盖板和多块第一磁块;所述下盖板与所述基座固定连接,多块所述第一磁块环形间隔安装在所述下盖板上;所述第二永磁组包括旋转层板和多块第二磁块,多块所述第二磁块环形间隔安装在所述旋转层板上,且多块第一磁块与多块第二磁块同轴设置;所述第一传动组件的驱动端与所述旋转层板连接,驱动所述旋转层板转动。变磁力组件为机器人运动提供稳定的吸附力。
13、在其中一个实施例中,所述第一磁块和所述第二磁块均为径向永磁铁,相邻的径向永磁铁的磁极相反;所述第二磁块位于所述第一磁块的正上方,且所述第一磁块与所述第二磁块的数量和位置一一对应设置。当第一磁块n极与第二磁块的n极、第一磁块s极与第二磁块的s极一一对齐时,磁力线叠加,此时磁吸附力最大,当第一磁块的n极与第二磁块的s极一一对齐时,磁力线相互抵消,此时磁吸附力最小。
14、在其中一个实施例中,所述第一传动组件包括旋转舵机、第二小带轮、第二同步带以及大带轮;所述旋转舵机安装在所述基座上,所述大带轮与所述旋转层板同轴固定连接,所述旋转舵机的输出端与所述第二小带轮连接,所述第二同步带分别与所述第二小带轮和大带轮啮合。
15、在其中一个实施例中,还包括上盖板、固定层板;所述上盖板安装在所述基座的顶部,所述下盖板安装在所述基座的底部,所述下盖板和所述固定层板均通过连接柱与所述基座固定连接,且所述旋转层板、大带轮位于所述下盖板和所述固定层板之间;所述基座、转动环、固定层板、旋转层板、大带轮位于上盖板和所述下盖板之间。
16、在本发明中,两个轮腿复合组件吸附在壁面,通过驱动轮实现快速移动。在变磁力组件中,控制旋转舵机使得第二永磁组旋转从而改变磁通量,从而获得最大磁吸力;在通过与升降组件的配合,使轮腿复合组件的底面保持较小的间隙且有较大的磁吸力。同时,关节摆转组件能够控制两组轮腿复合组件之间的距离,以保持一个稳定的姿态移动。
17、机器人通过关节摆转组件和轮腿复合组件之间的相互配合,完成翻越法兰型障碍物。升降组件抬起驱动轮和从动轮使变磁力组件紧贴壁面,磁力大大增加,翻越障碍过程更加稳定。机器人下端轮腿复合组件首先消去磁力抬离壁面,关节摆转组件使下端足部绕中间的关节模组翻越到上端,在接触上端壁面时,再次通过变磁力组件恢复磁力,使翻越到上方的轮腿复合组件紧紧吸附在壁面上。
18、另外,机器人还能通过关节摆转组件和轮腿复合组件之间的相互配合,完成过渡内角。机器人在过渡过程中,靠近内角的轮腿复合组件通过变磁力组件和升降组件紧贴壁面,确保过渡过程稳定;远离内角的轮腿复合组件通过变磁力组件消去磁力抬离壁面,关节摆转组件使下端轮腿复合组件绕中间的第一摆转电机翻越到上端;下端轮腿复合组件平面接触壁面时,再次通过变磁力组件恢复磁力,调整姿态使轮腿复合组件紧紧吸附在壁面上;另一端轮腿复合组件同样消去磁力抬起,通过关节摆转组件配合运动,使轮腿复合组件吸附到平面上。
19、与现有技术相比,有益效果是:本发明提供的一种爬壁机器人的轮腿复合模组,可以实现轮式运动模式和足式运动模式的切换,既保证了轮式运动的高效性又保证了足式运动的越障性。对壁面的适应能力更强,也能适用更多的应用场景。相比同类型机器人,运动模式切换更加稳定;提高了机器人的灵活性,从而能够在复杂的环境中运动,安全且高效。
- 还没有人留言评论。精彩留言会获得点赞!