一种用于电动滑板车平稳行驶的自动识别控制方法及系统与流程
本发明涉及电动车控制,具体是涉及一种用于电动滑板车平稳行驶的自动识别控制方法及系统。
背景技术:
1、电动滑板车是以传统人力滑板为基础,加上电力套件的交通工具。电动滑板一般分为双轮驱动或单轮驱动,最常见的传动方式分别为轮毂电机以及皮带驱动,其主要电力来源为锂电池组。
2、电动滑板车行驶过程中,减震器的刚度是影响电动滑板车行驶平稳性的重要参数,具体的,减震器的刚度越高,电动滑板车在平坦路况上的行驶平稳度越高,减震器的刚度越低,电动滑板车在颠簸路况上的行驶平稳度越高,而现有技术中,虽然存在可调节式减震器在电动滑板车中的运用,然而,缺乏对于减震器参数的智能化调控手段,难以根据路况及行驶状态的变化进行自动识别调整减震器,使得电动滑板车应对复杂路况的能力较差。
技术实现思路
1、为解决上述技术问题,提供一种用于电动滑板车平稳行驶的自动识别控制方法及系统,本技术方案解决了上述的现有技术缺乏对于减震器参数的智能化调控手段,难以根据路况及行驶状态的变化进行自动识别调整减震器,使得电动滑板车应对复杂路况的能力较差的问题。
2、为达到以上目的,本发明采用的技术方案为:
3、一种用于电动滑板车平稳行驶的自动识别控制方法,包括:
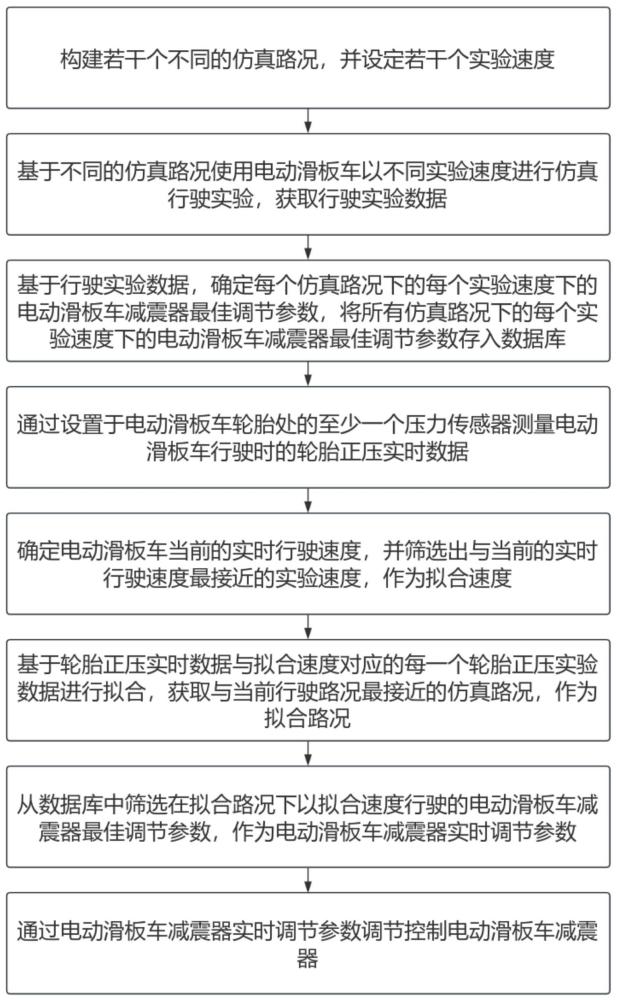
4、构建若干个不同的仿真路况,并设定若干个实验速度;
5、基于不同的仿真路况使用电动滑板车以不同实验速度进行仿真行驶实验,获取行驶实验数据,所述行驶实验数据至少包括轮胎正压实验数据和车身震动实验数据;
6、基于行驶实验数据,确定每个仿真路况下的每个实验速度下的电动滑板车减震器最佳调节参数,将所有仿真路况下的每个实验速度下的电动滑板车减震器最佳调节参数存入数据库;
7、通过设置于电动滑板车轮胎处的至少一个压力传感器测量电动滑板车行驶时的轮胎正压实时数据;
8、确定电动滑板车当前的实时行驶速度,并筛选出与当前的实时行驶速度最接近的实验速度,作为拟合速度;
9、基于轮胎正压实时数据与拟合速度对应的每一个轮胎正压实验数据进行拟合,获取与当前行驶路况最接近的仿真路况,作为拟合路况;
10、从数据库中筛选在拟合路况下以拟合速度行驶的电动滑板车减震器最佳调节参数,作为电动滑板车减震器实时调节参数;
11、通过电动滑板车减震器实时调节参数调节控制电动滑板车减震器。
12、优选的,所述基于不同的仿真路况使用电动滑板车以不同实验速度进行仿真行驶实验,获取行驶实验数据至少包括:
13、于电动滑板车车身上设置若干个震动数据采集点;
14、在每个震动数据采集点均设置水平震动传感器和竖直震动传感器;
15、确定电动滑板车减震器的若干个调节档位;
16、控制电动滑板车分别在不同电动滑板车减震器调节档位下,以不同的实验速度在仿真路况中行驶,采集不同的实验速度下在不同仿真路况中的轮胎正压变化曲线,作为轮胎正压实验数据,采集不同电动滑板车减震器调节档位下每个震动数据采集点的水平震动变化曲线和竖直震动变化曲线;
17、通过震动指标计算公式,分别计算不同电动滑板车减震器调节档位下每个震动数据采集点的水平震动指标和竖直震动指标,作为车身震动实验数据。
18、优选的,所述震动指标计算公式为:
19、
20、式中,m为水平震动指标或竖直震动指标,为水平震动变化曲线或竖直震动变化曲线上极大值,均为水平震动变化曲线或竖直震动变化曲线上极小值,为水平震动变化曲线或竖直震动变化曲线上极大值点对应的时间值,均为水平震动变化曲线或竖直震动变化曲线上极小值点对应的时间值,n为水平震动变化曲线或竖直震动变化曲线上极大值点的数量。
21、优选的,所述基于行驶实验数据,确定每个仿真路况下的每个实验速度下的电动滑板车减震器最佳调节参数具体包括:
22、基于在相同实验速度,相同仿真路况下的所有电动滑板车减震器调节档位下的每个震动数据采集点的计算水平震动指标和竖直震动指标,构建每个震动数据采集点的震动实验矩阵,,其中,为第k个震动数据采集点对应的震动实验矩阵,为第k个震动数据采集点的在第j个电动滑板车减震器调节档位下的水平震动指标,为第k个震动数据采集点的在第j个电动滑板车减震器调节档位下的竖直震动指标,为电动滑板车减震器调节档位总数量;
23、基于震动实验矩阵,分别计算震动数据采集点在每个电动滑板车减震器调节档位下的综合震动指标;
24、基于震动数据采集点在电动滑板车车身的位置,对每个震动数据采集点附加抗震权重;
25、通过整车震动计算公式,计算电动滑板车在每个电动滑板车减震器调节档位下的全车震动指标;
26、筛选出全车震动指标最小值对应的电动滑板车减震器调节档位,作为当前仿真路况下的当前实验速度下的电动滑板车减震器最佳调节参数。
27、优选的,所述整车震动计算公式为:
28、
29、式中,在第j个电动滑板车减震器调节档位下的全车震动指标,为震动数据采集点总数量,为第k个震动数据采集点的抗震权重,第k个震动数据采集点在第j个电动滑板车减震器调节档位下的综合震动指标。
30、优选的,所述基于震动实验矩阵,分别计算震动数据采集点在每个电动滑板车减震器调节档位下的综合震动指标具体为:
31、筛选出震动实验矩阵中所有水平震动指标中的最小值和所有竖直震动指标中的最小值,作为最优震动指标组;
32、基于最优距离公式,分别计算每个电动滑板车减震器调节档位下的水平震动指标和竖直震动指标与最优震动指标组之间的向量距离,作为震动数据采集点在电动滑板车减震器调节档位下的综合震动指标;
33、所述最优距离公式为:
34、
35、式中,为第k个震动数据采集点对应的所有水平震动指标中的最小值,为第k个震动数据采集点对应的所有竖直震动指标中的最小值。
36、优选的,所述基于轮胎正压实时数据与每一个轮胎正压实验数据进行拟合,获取与当前行驶路况最接近的仿真路况,作为拟合路况具体包括:
37、获取当前行驶状态下的轮胎正压实时变化曲线;
38、设定一拟合周期,基于拟合公式计算与当前时刻最接近的拟合周期内的轮胎正压实时变化曲线与每一个轮胎正压实验数据之间的拟合指标;
39、筛选出拟合指标最小值对应的轮胎正压实验数据,记为轮胎正压拟合数据;
40、以轮胎正压拟合数据对应的仿真路况,作为拟合路况。
41、优选的,所述拟合公式为:
42、
43、式中,为轮胎正压实时变化曲线与第v个轮胎正压实验数据之间的拟合指标,为拟合周期时长,为轮胎正压实时变化曲线函数式,为第v个拟合路况对应的轮胎正压实验数据函数式。
44、进一步的,提出一种用于电动滑板车平稳行驶的自动识别控制系统,用于实现如上述的用于电动滑板车平稳行驶的自动识别控制方法,包括:
45、仿真实验模块,所述仿真实验模块用于构建若干个不同的仿真路况,并设定若干个实验速度,并基于不同的仿真路况使用电动滑板车以不同实验速度进行仿真行驶实验,获取行驶实验数据;
46、实验分析模块,所述实验分析模块与所述仿真实验模块电性连接,所述实验分析模块用于基于行驶实验数据,确定每个仿真路况下的每个实验速度下的电动滑板车减震器最佳调节参数;
47、存储模块,所述存储模块与所述实验分析模块电性连接,所述存储模块用于存储所有仿真路况下的每个实验速度下的电动滑板车减震器最佳调节参数;
48、路况数据采集模块,所述路况数据采集模块用于通过设置于电动滑板车轮胎处的至少一个压力传感器测量电动滑板车行驶时的轮胎正压实时数据;
49、拟合模块,所述拟合模块与所述路况数据采集模块电性连接,所述拟合模块用于确定电动滑板车当前的实时行驶速度,并筛选出与当前的实时行驶速度最接近的实验速度,作为拟合速度,并基于轮胎正压实时数据与拟合速度对应的每一个轮胎正压实验数据进行拟合,获取与当前行驶路况最接近的仿真路况,作为拟合路况;
50、抗震调节模块,所述抗震调节模块与所述拟合模块电性连接,所述抗震调节模块用于从数据库中筛选在拟合路况下以拟合速度行驶的电动滑板车减震器最佳调节参数,作为电动滑板车减震器实时调节参数,并通过电动滑板车减震器实时调节参数调节控制电动滑板车减震器。
51、与现有技术相比,本发明的有益效果在于:
52、本发明提出一种用于电动滑板车平稳行驶的自动识别控制方案,通过对滑板车进行抗震调控实验,预先获取在不同路况下的电动滑板车行驶最平稳的减震器调节参数构建数据库,基于电动滑板车在行驶过程中轮胎压力变化来实时的拟合电动滑板车的具体行驶路况,并于数据库中调取与当前路况最接近的减震器调节参数,通过此方式,根据路况及行驶状态的变化进行自动识别调整减震器,可有效的进行电动滑板车的平稳行驶控制,极大地提高了电动滑板车对复杂路况的应对能力。
- 还没有人留言评论。精彩留言会获得点赞!