一种倒三轮主动悬架窄体机器人
本发明涉及窄体机器人,尤其是涉及一种倒三轮主动悬架窄体机器人。
背景技术:
1、现有的轮式机器人平台多是采用四轮被动悬架形式的宽体机器人,如自动驾驶汽车等,主要面向结构化城市路面和室内环境,靠转向机构和轮地摩擦实现机动转向,在台阶、野外非结构路面环境中容易出现倾覆,即使在平坦路面环境中高速转弯过程中易出现侧倾,机动转弯半径大,绕障和通过能力有限。
2、装备有该主动悬架的窄体机器人平台宽度较窄,可根据车轮的转速、前轮转向角度实时调整主动悬架来调整本体侧倾姿态、适应多障碍、崎岖、坑洼不平的非结构路面环境、狭窄通道环境。
技术实现思路
1、本发明的目的是提供一种倒三轮主动悬架窄体机器人,不仅适用于机构化路面环境,而且对多障碍、坑洼不平的非结构路面、坡面和窄通道同样适用,并可在崎岖不平的环境中抑制平台本体的震动,可有效提高机器人的稳定性和安全性。
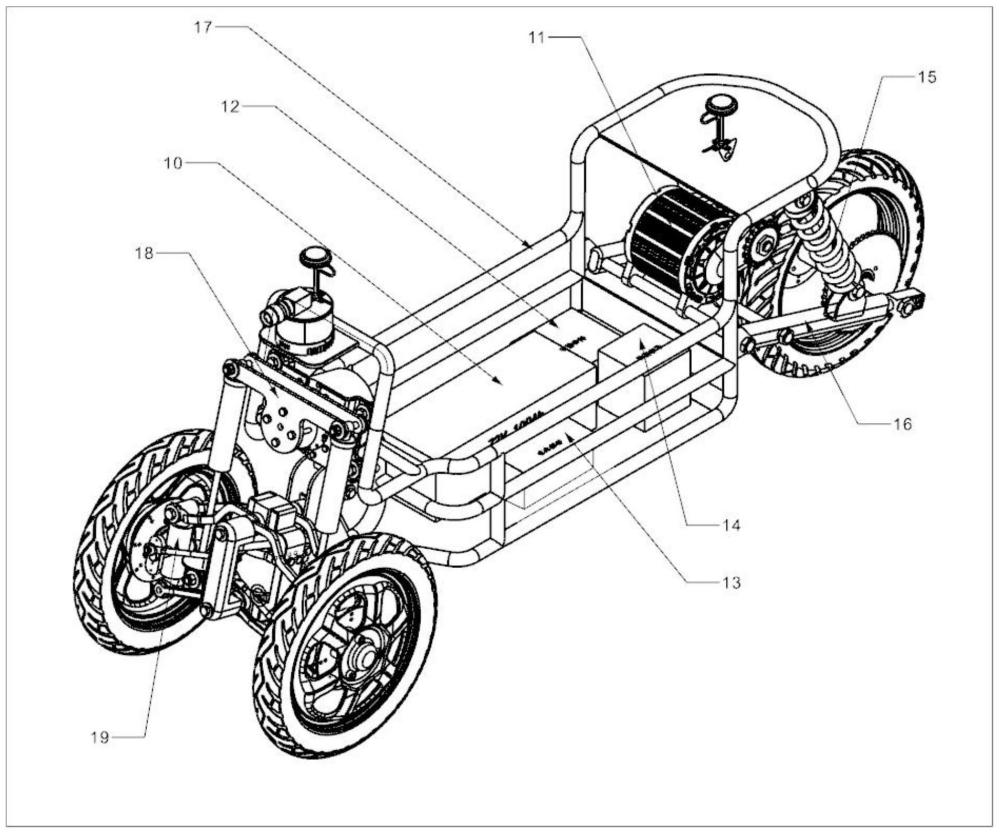
2、为实现上述目的,本发明提供了一种倒三轮主动悬架窄体机器人,包括前转向侧倾结构、机器人平台和后驱动结构,所述前转向侧倾结构包括前变阻尼减震器、侧倾电机和转向电机,所述前转向侧倾结构通过所述前变阻尼减震器与转向组件连接,所述前变阻尼减震器通过转向节连接前轮。
3、优选的,所述前转向侧倾结构包括前变阻尼减震器、侧倾电机和转向电机,所述转向组件包括侧倾转向连杆和所述转向节,所述侧倾电机通过所述侧倾转向连杆连接所述前变阻尼减震器。
4、优选的,所述转向电机设于所述侧倾电机的底部。
5、优选的,所述机器人平台包括车架,所述车架内设有电池和电源模块,所述电池和电源模块外侧分别设有姿态传感器和机器人控制器,所述姿态传感器的一侧设有动力驱动器。
6、优选的,所述后驱动结构主要包括后驱动电机,所述后驱动电机驱动后轮转动,所述后轮通过后桥连接在所述车架上。
7、优选的,所述后桥与所述车架之间设有后变阻尼减震器。
8、优选的,所述前轮是指前左轮和前右轮。
9、因此,本发明采用上述一种倒三轮主动悬架窄体机器人,通过前转向、主动侧倾机构、电动主动变阻尼悬架和后驱动轮实现机器人在野外、地外星表等结构复杂环境的主动姿态调整,可实现机器人高机动转弯和侧倾,对多障、坑洼不平、松软差异大的环境具有良好的自适应性。
10、同时该电动主动变阻尼悬挂利用前轮中心的竖直位移变化量来实时调节悬架设置,通过侧倾电机快速精确地响应主控模块的指令,以抵消非结构路面引起的不稳定震动。此外,该机器人的正常通行宽度较窄,前轮极限转向角度较大,确保了在狭窄空间内的灵活性和机动性。
11、同时优化了机器人的结构布局,使其不仅在机械性能上优越,而且在重量、成本和维护的效率上都得到提升。将前转向侧倾结构、机器人平台和后驱动结构连接在一起,使得机器人能够在保持其结构完整性和耐久性的同时,还提供卓越的操作性能和长期可靠性,确保在面对各种工作环境和挑战时的持续性能表现。
12、该机器人的设计允许其在各种结构以及非结构路面运行,从而扩大了其应用范围。这包括但不限于平坦道路、斜坡、障碍物密布的区域以及其他常见于户外环境的复杂地形。通过这种多地形适应性,窄体机器人凭借其高度适应性和机动性,可在农业、建筑、物流仓储、城市巡检、救灾、环境监测、公共安全以及探险和科学研究等多个领域中发挥关键作用。其独特的设计使其特别适用于需要高度机动性和通过性的场合,如狭窄的城市街道、复杂的工地环境、拥挤的仓库空间,以及各种极端和不规则的自然地形。
13、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种倒三轮主动悬架窄体机器人,其特征在于:包括前转向侧倾结构、机器人平台和后驱动结构,所述前转向侧倾结构包括前变阻尼减震器、侧倾电机和转向电机,所述前转向侧倾结构通过所述前变阻尼减震器与转向组件连接,所述前变阻尼减震器通过转向节连接前轮。
2.根据权利要求1所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述转向组件包括侧倾转向连杆和所述转向节,所述侧倾电机通过所述侧倾转向连杆连接所述前变阻尼减震器。
3.根据权利要求1所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述转向电机设于所述侧倾电机的底部。
4.根据权利要求1所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述机器人平台包括车架,所述车架内设有电池和电源模块,所述电池和电源模块外侧分别设有姿态传感器和机器人控制器,所述姿态传感器的一侧设有动力驱动器。
5.根据权利要求4所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述后驱动结构主要包括后驱动电机,所述后驱动电机驱动后轮转动,所述后轮通过后桥连接在所述车架上。
6.根据权利要求5所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述后桥与所述车架之间设有后变阻尼减震器。
7.根据权利要求1所述的一种倒三轮主动悬架窄体机器人,其特征在于:所述前轮是指前左轮和前右轮。
技术总结
本发明公开了一种倒三轮主动悬架窄体机器人,属于窄体机器人技术领域,包括前转向侧倾结构、机器人平台和后驱动结构,所述前转向侧倾结构包括前变阻尼减震器、侧倾电机和转向电机,所述前转向侧倾结构通过所述前变阻尼减震器与窄体转向组件连接,所述前变阻尼减震器通过转向节连接前轮。本发明采用上述的一种倒三轮主动悬架窄体机器人,不仅适用于机构化路面环境,而且对多障碍、坑洼不平的非结构路面、坡面和窄通道同样适用,并可在崎岖不平的环境中抑制平台本体的震动,可有效提高机器人的稳定性和安全性。
技术研发人员:孙一勇,陈章,翟光,刘星安,王晓峰,王海东,胡权,张尧,梁斌
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!