复杂环境的智能搬运装置、协同控制系统、控制方法
本发明属于智能搬运,具体涉及一种复杂环境的智能搬运装置、协同控制系统、控制方法。
背景技术:
1、随着互联网技术和机械化水平的提高,智能机械化装备被广泛应用于工业、农业、畜牧业等不同领域,而山区物资运输技术水平是山区发展的重要基础,自动化水平的提升有助于山区与城市之间的交流,为山区相关产业的发展搭建良好的桥梁。
2、山区地域环境复杂,因道路崎岖使得物资搬运困难,高昂的人力、物力成本迫使山区产品价格不断上升,进而引起山区产品竞争力下降。此外,泥石流、山体滑坡等现象时常发生,这对山区物资运输人员的生命安全也产生了很多的不利因素。为了改善山区物资运输环境,有效提高山区智能机械化发展,减轻人们劳动负担,市面上出现了一种电动搬运装置,采用两轮驱动,给使用者一定的前进力,能够相对机械化的进行山区的物资搬运,适当减轻人们的劳动负担,但是在运输过程中,此种电动搬运装置重心位置跟随外界环境的变化而变化,不平稳,易因左右两轮子高度不同而出现倾倒现象。
技术实现思路
1、本发明的目的是克服现有技术中存在的运输过程中无法根据外界环境实时稳定重心的缺陷,提供了一种能够实时自适应重心位置的复杂环境的智能搬运装置、协同控制系统、控制方法。
2、本发明解决其技术问题所采用的技术方案是:
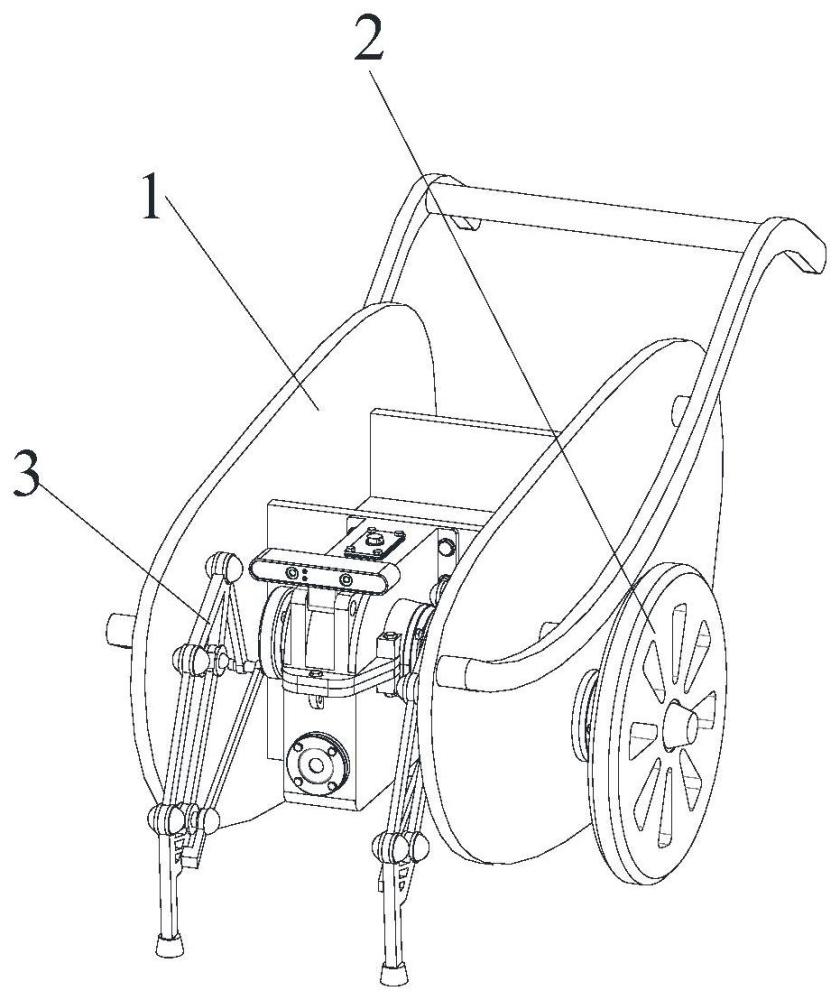
3、作为第一个方面,一种复杂环境的智能搬运装置,包括机架、安装在所述机架上的后肢行走机构和前肢行走机构;所述前肢行走机构包括安装在所述机架上的动力机构和均与所述动力机构的输出端传动设置的两平衡行走腿;其中,
4、所述平衡行走腿包括:
5、与所述动力机构的输出端转动设置的上旋转架和下旋转架;
6、三角旋转架,所述三角旋转架的第一顶角与所述上旋转架转动连接;
7、第一平衡架,所述第一平衡架的一端与所述三角旋转架的第二顶角转动连接;
8、第二平衡架,所述第二平衡架的一端与所述三角旋转架的第三顶角转动连接;
9、y形支腿,所述y形支腿的两上端部分别与所述第一平衡架、第二平衡架转动连接;所述下旋转架远离所述动力机构的输出端的一端与所述y形支腿转动连接;在行走时,所述y形支腿的下端部支撑在地面上。
10、具体地,所述动力机构包括:
11、安装在所述机架上的驱动电机;
12、输出横轴,与所述驱动电机的输出轴通过传动组件传动连接;
13、两个驱动轮盘,通过差速器与所述输出横轴传动设置,两所述驱动轮盘分别位于所述机架的两侧;其中,
14、所述驱动轮盘的边缘固定安装有驱动杆,所述上旋转架、下旋转架均与所述驱动杆转动连接,所述下旋转架远离所述驱动杆的一端和所述第二平衡架均与所述y形支腿的同一个上端部转动连接。
15、具体地,所述传动组件包括与所述驱动电机的输出轴同轴设置的蜗杆和与所述蜗杆配合传动连接的蜗轮;所述输出横轴与所述蜗轮同轴设置。
16、具体地,所述后肢行走机构包括两个车轮和连接两所述车轮的车轮轴;
17、在行走过程中,两所述前肢行走机构始终支撑地面,所述后肢行走机构的至少一个车轮支撑地面。
18、作为第二个方面,一种复杂环境的智能搬运装置的协同控制系统,包括:
19、视觉识别模块,通过调节支架安装在所述前肢行走机构上,用于实时监测采集行走路线地貌特征;
20、车载主控模块,接收所述视觉识别模块发送的采集数据,并对采集数据进行计算,规划路径,将路径规划信息传出;
21、远程监控控制终端,接收所述车载主控模块输出的数据信号,并对接收的数据信号进行远程显示和控制,并将控制结果输出给所述车载主控模块;所述车载主控模块根据远程监控控制终端发送的控制命令,调整所述前肢行走机构的行走路线;其中,
22、所述车载主控模块与所述远程监控控制终端通过无线通讯模块构成闭环控制。
23、具体地,所述车载主控模块包括北斗导航模块、路径规划模块、路径管理模块、异常报警模块、参数设置模块、视频监视模块、装载控制模块。
24、作为第三个方面,协同控制系统的协同控制方法,其特征在于,包括以下步骤:
25、s1.智能搬运装置与控制系统的身份绑定;
26、s2.初始化操作,即对智能搬运装置的基础信息进行初始化设置;
27、s3.路径参数设定,所述路径参数包括智能搬运装置的初始位置和目标位置;
28、s4.控制自主运行,即通过车载主控模块给智能搬运装置发送自主运动指令;
29、s5.行进轨迹的实时调整,即根据所述视觉识别模块识别到的障碍物位置进行避让判断,根据判断结果实时更新行走路径;
30、s6.完成一次运输。
31、具体地,步骤s5中所述障碍物位置进行避让判断包括以下步骤:
32、若所述视觉识别模块检测到的障碍物特征在设定的规避特征阈值内,则对路径做避障规划,避障完成后按照所述北斗定位模块的导航路线往目标位置运动;
33、若所述视觉识别模块检测到的障碍物特征不在设定的规避特征阈值内,按照所述北斗导航模块的预设轨迹向终点运动,直至到达设定目标终点位置。
34、具体地,所述障碍物特征包括障碍物深度、障碍物高度以及障碍物位置与所述智能搬运装置的实时位移值之间的位移差值,所述智能搬运装置的实时位移值计算采用基于小波变换的自适应lms滤波方法,所述自适应lms滤波方法包括以下步骤:
35、h1.实时检测障碍物数据,并将障碍物数据作为输入信号x(n);
36、h2.波形信号的分解和处理,即对输入信号x(n)进行线性和非线性波形分解,对分解的波形信号进行阈值限定处理;
37、h3.小波重构波形拟合,即将分解和处理后的波形信号进行拟合得到期望信号d(n);
38、h4.输入信号x(n)再通过期望信号为d(n)的变步长lms自适应滤波算法进行滤波,得到去除噪音的障碍物特征。
39、具体地,所述步长lms自适应滤波方法对检测到的实时位移值进行滤波的具体计算包括:
40、根据式(1)进行自适应滤波;
41、
42、其中,y(n)为滤波器的输出信号,x(n)为滤波器的输入信号,w(n)为自适应滤波器n时刻自适应算法所得出的滤波器抽头权向量,i为当前迭代次数,m为自适应滤波器迭代的阶数;
43、通过式(2)进行误差值计算;
44、e(n)=d(n)-y(n) (2)
45、其中,e(n)为该时刻期望输出量和实际输出量之差,d(n)为期望信号,y(n)为经过自适应滤波器滤波后在该时刻的输出信号;
46、将步长因子μ作为目标参数,通过tent混沌映射生成初始种群,根据麻雀搜索算法设置边界参数,发现者追随者和警觉者的比重,通过迭代更新计算麻雀的适应值,更新发现者位置:
47、
48、其中,为t时刻雀群中第i只所在第k维的位置信息,t表示当前处于第t次的迭代,t为总迭代次数,r2∈[0,1]表示为预警值,st∈[0.5,1]表示为安全值,γ为服从正态分布的随机数,l表示行为i列为k,元素均为1的矩阵;α为0~1的随机数,若当r2小于st时,可进行搜索;若当r2大于或等于st时,则此时预警值大于安全值,麻雀中的所有发现者向其他范围进行搜索;
49、更新追随者位置:
50、
51、其中,为t+1次迭代中雀群中第j只所在第k维的位置信息,为在t+1次迭代中所处k维的最佳位,xworst为当前所在k维的最差位,a为1行多维的矩阵且各元素被随机赋值1或-1,若当i大于n/2时,则表示当前第i只适用度差的跟随者需要向其他范围搜索;
52、更新警觉者位置:
53、
54、其中,k∈[-1,1]为步长控制参数,取值为随机数,fi为所处i麻雀的适应度值,fg与fw为全局最优位置和全局最差位置信息,ε为最小常数,为当前的全局最佳位置,β为步长控制参数。
55、本发明的一种复杂环境的智能搬运装置的有益效果是:
56、本发明的前肢行走机构采用多部件转动连接的平衡行走腿,在行走过程中,两个平衡行走腿能够自适应外界环境,实时自适应智能搬运装置的重心位置,两个平衡行走腿的y形支腿始终支撑在地面上,在行走过程中始终保持与地面三点接触,有效提高智能搬运装置的适应性、稳定性,解决现有技术中复杂环境搬运装置因重心位置变化造成的倾倒问题。
57、本发明的一种复杂环境的智能搬运装置的控制方法有益效果是:
58、本发明的控制方法能够根据外界环境中的障碍物特征进行避让判断,对智能搬运装置的行走路线进行实时的更新,较大程度上实现智能搬运装置的顺利行走,不需要人工跟随和实时监控控制,可实现智能搬运装置的自主调整和运行。
- 还没有人留言评论。精彩留言会获得点赞!