深海应急处置工具布放装置的制作方法
[0001]
本发明涉及的是一种海洋技术领域的技术,具体是一种深海应急处置工具布放装置。
背景技术:
[0002]
为解决深水沉船内部液体或物品回收的问题,需采用适应深海特殊条件的专用技术与工具设备,与深水rov协同作业,完成对深水沉船的封堵、开孔、切割、抽液等应急处置。rov协同作业所涉及的专用工具种类和数量通常较多,专用工具现有的布放、回收及其轮换方式往往会占据大量的作业时间和工作量,且随着深度而成比例增加,决定了应急处置的作业效率和可推广性。
技术实现要素:
[0003]
本发明针对现有技术存在的上述不足,提出一种深海应急处置工具布放装置,通过在主体框架内设有用来存放专用工具的组合舱体,并设置机械传动控制的舱门,并且设有防护与缓冲装置,实现多种专用工具的海底布放,节省了布放、回收及工具轮换时间,在深海沉船及沉物的打捞、抢险和救援等方面具有广阔应用前景。
[0004]
本发明是通过以下技术方案实现的:
[0005]
本发明包括:主体框架、组合舱体、定位传感器和rov协同工具接口,其中:组合舱体设置于主体框架内,定位传感器和rov协同工具接口设置于组合舱体上。
[0006]
所述的主体框架包括:底座、上连接架、承重吊点和支腿结构,其中:上连接架设置于底座上,承重吊点设置于底座顶部四周,支腿结构设置于底座底部下。
[0007]
所述的组合舱体包括:舱体框架、底板、舱门、锁具和防护与缓冲装置,其中:舱体框架设置于主体框架内,底板设置于舱体框架底部内,舱门通过锁具设置于舱体框架侧面上。
[0008]
所述的防护与缓冲装置包括:防护橡胶和防护板,其中:防护橡胶设置于舱体框架内边缘和舱门上,防护板设置于舱门上四周。
[0009]
所述的锁具包括:锁舌、锁钳、顶块、传动轴、操作把手和限位块,其中:锁舌设置于锁钳内,锁钳设置于传动轴一端,顶块设置于传动轴上并设置于锁钳上方,操作把手和限位块相连并设置于传动轴另一端。
[0010]
所述的舱门为喇叭口结构。技术效果
[0011]
本发明整体解决了复杂的多工具系统水下联合作业时所需面对的吊机数量不足、反复布放时间长、效率低、风险性高等问题,特别适合于rov协同作业工具的水下集中布放与回收。
[0012]
与现有技术相比,本发明通过模块化的舱体组合设计,结合工程需要选择舱体数量及其布置方式;独特的舱门及其锁具设计,适合rov机械手操作进行舱门打开与关闭。本
发明采用集中方式进行多种专用工具海底布放,根据作业过程需求采用rov协同作业方式进行工具轮换,作业完成后再由布放装置集中回收专用工具至水面,节省了布放、回收及工具轮换时间,在深海沉船及沉物的打捞、抢险和救援等方面具有广阔应用前景。
附图说明
[0013]
图1为本发明主体框架结构示意图;
[0014]
图2为本发明组合舱体结构示意图;
[0015]
图3为本发明组合舱体舱门打开状态结构示意图;
[0016]
图4为本发明锁具结构示意图;
[0017]
图5为本发明操作把手结构示意图;
[0018]
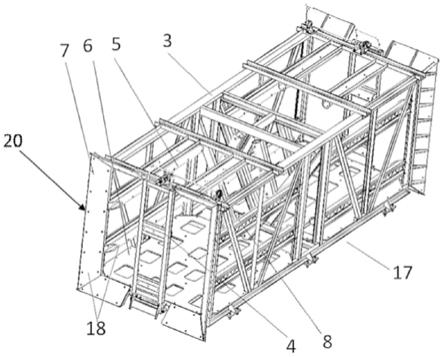
图中:底座1、上连接架2、组合舱体3、舱门4、防护橡胶5、底板6、防护板7、锁具8、锁舌9、锁钳10、顶块11、传动轴12、操作把手13、限位机构14、主体框架15、承重吊点16、舱体框架17、防护与缓冲装置18、支腿结构19、导向结构20。
具体实施方式
[0019]
如图1所示,为本实施例涉及的一种深海应急处置工具布放装置,其中包含:主体框架15、用于存放专用工具的组合舱体3、定位传感器和rov协同工具接口,其中:组合舱体3设置于主体框架15内,定位传感器和rov协同工具接口设置于组合舱体3上。
[0020]
所述的主体框架15包括:底座1、上连接架2和承重吊点16,其中:上连接架2设置于底座1上,承重吊点16设置于底座1顶部四周,支腿结构19设置于底座1底部下,防止地势不平导致整体倾斜。
[0021]
所述的组合舱体3包括:舱体框架17、底板6、舱门4、锁具8和防护与缓冲装置18,其中:舱体框架17设置于主体框架15内,底板6设置于舱体框架17底部内,舱门4通过锁具8设置于舱体框架17侧面上,用于保护内部工具并防止其滑出舱体框架17,舱门4可通过rov辅助操作或水下遥控舱门锁具方式进行舱门开启和关闭。
[0022]
所述的舱体框架前端设有喇叭口型的导向结构20,用于专用工在水下对准并进入舱口,该导向结构降低工具系统进入舱体时对rov的定位精度,有利于恶劣海况作业;舱体内置防护与缓冲装置18,并且可根据工具尺寸进行适应性调整,在工具进出舱体时起到导向作用,在布放过程中则起到对工具的固定与缓冲冲击等作用。
[0023]
所述的防护与缓冲装置18包括:防护橡胶5和防护板7,其中:防护橡胶5设置于舱体框架17内边缘和舱门4上,防护板7设置于导向结构20的表面四周。
[0024]
如图4所示,所述的锁具8包括:锁舌9、锁钳10、顶块11、传动轴12、操作把手13和限位机构14,其中:锁舌9设置于锁钳10内,具有弹簧复位功能,舱门关闭时可在外力作用下自动打开锁舌,使舱门关闭并锁紧;锁钳10设置于传动轴12一端,顶块11设置于传动轴12上并设置于锁钳10上方,操作把手13和限位机构14相连并设置于传动轴12另一端,rov机械手或液压、电机驱动传动机构带动锁钳10、锁舌9运动,直至限位功能解除后将舱门4打开。
[0025]
如图3所示,所述的舱门4为喇叭口结构,舱门为下翻的形式,在水下依靠rov机械手在操作完成,先由机械手打开锁具8,再将舱门4打开,舱门4上方设置有机械手抓取的把手,舱门4下面铰链位置设置有阻尼缓冲机构,并且设置有限位,防止舱门倒进淤泥中;舱门
4被打开后,舱门锁会始终处于打开状态,关门之前需将操作把手13恢复到初始状态(初始状态为竖直向上),之后关上舱门4,关舱门4时需有移动的推力,将锁舌9推入锁钳10之中,此时舱门4便已关闭妥当。
[0026]
所述的承重吊点16用于与海上起重用吊具、吊索连接,包括:固定吊点或分离吊点,固定吊点在装置整体布放至海底后索具与布放装置分离,作业结束后再由水面下放对接索具对接,分离吊点由rov辅助进行吊点对接。
[0027]
所述的定位传感器采用声学或光学原理,定位传感器将海底位置发送至水面,用于水面定位和调整;水下可向rov提供实际位置,便于rov定位和搜寻。
[0028]
所述的组合舱体3内可搭载的应急处置工具系统包括:开孔工具、抽液工具、切割工具、清洗工具以及辅助工具,专用工具下水之前先装进组合舱体3内,再整体布放海底施工位置,整个布放装置通过承重吊点16由水面吊机进行深水布放,布放至海底后再由rov进行舱内专用工具的对接、轮换作业以及作业结束后的工具复位,最后由布放装置整体回收专用工具系统。
[0029]
经过具体实际实验,本发明可一次性搭载6套应急处置工具,根据母船吊机与rov的配套条件确定布放水深,现有设备最大支持6000m布放与回收。本方法采用一次集中布放、水下轮换作业方式,大大减少水下非作业时间,以6000m作业水深、6种工具作业为例,普通作业方式布放(回收)时间约为42小时,集中布放(回收)时间仅需7小时,并且本方法的作业效率与作业水深和工具种类成正比。
[0030]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1