一种载人潜水器安全操纵控制装置及方法
1.本发明涉及载人潜水器安全操纵控制装置,具体地说是一种载人潜水器安全操纵控制装置及方法。
背景技术:
2.潜水器包括载人潜水器和无人潜水器,载人潜水器用于实现在水下的载人航行、科考、勘探作业等工作,载人潜水器在水下作业时,与母船之间无任何连接。潜航员在载人舱内对潜水器进行操纵与控制,潜水器外部布置多种传感器进行信号检测、多台推进器提供动力输出以及多个节点单元进行信号处理,潜水器的多自由度运动控制,主要通过对多台推进器的逻辑组合控制进行实现,以保证潜水器在水中自由航行。
3.由于载人潜水器应用环境的特殊性,在深海环境下,随着下潜深度的增加,潜水器所承受的压力增加,同时深海条件下环境复杂,潜水器所面临的风险因素也会相应增加。潜水器能够在水下完成作业及科考等任务,主要依靠灵活的运动控制,实现多点采样、地形扫描、目标搜寻及定点作业等任务,并且针对载人潜水系统,必须具备安全性、可靠性及稳定性的特征。由于潜水器系统结构复杂,各系统之间的相互耦合关系较多,在水下作业过程中,难免会出现各种故障。在潜水器运动控制方面,若航行控制系统由于故障原因无法对推进器施加控制,并且没有相应的应急控制方案,则会导致潜水器失去动力,无法继续进行作业,此时潜水器必须返回水面进行故障修复,降低了作业效率,并且在水下无动力状态会威胁潜水器的安全,甚至威胁到载人舱内潜航员的人身安全,所以潜水器为了保证设备及人员安全,简单逻辑的控制方法无法满足载人潜水器的高可靠性及安全性的航行操纵要求。
技术实现要素:
4.为了克服上述的问题,本发明要解决的技术问题是提供一种结构简单的潜水器安全操纵控制装置,通过该装置可实现载人潜水器多重安全操纵,同时提高潜水器操纵的便捷性。
5.本发明为实现上述目的所采用的技术方案是:一种载人潜水器安全操纵控制装置,包括:舱外单元、设置在潜水器舱内单元的主操纵部件、便携操纵部件、通信及逻辑控制模块、主控单元、供电模块以及交互单元;
6.所述通信及逻辑控制模块分别与主操纵部件、便携操纵部件和供电模块连接,用于在主操纵部件与便携操纵部件之间的操纵模式切换时,实现线路切换及断电自切换功能;
7.所述主操纵部件,用于当切换至主操纵控制模式时,将控制潜水器运动的操纵信号发送至主控单元,以实现潜水器的运动控制;所述主操纵部件还直接与舱外应急模块直连通信;
8.所述便携操纵部件,与主控单元通过信号线缆连接,用于当切换至便携操作模式时,将控制潜水器运动的操纵信号发送至主控单元;所述便携操作部件还直接与舱外应急
模块直接通信;
9.所述主控单元,与舱外单元进行通信,用于接收来自主操纵部件或便携操纵部件的操纵信号,并将操纵信号转化为网络信号并发送至舱外单元进行驱动输出;
10.所述交互单元,包括操纵方式切换开关和程控应急开关,所述操纵方式切换开关与通信及逻辑控制模块连接,程控应急开关与舱外应急单元连接,用于切换选择主操纵部件或便携操纵部件进行潜水器操纵,主操纵部件和便携操纵部件部件均可执行程控操纵控制与应急操纵控制。
11.所述通信及逻辑控制模块包括:断电切换模块以及与其连接的使能切换模块;
12.所述断电切换模块输入端与供电模块连接,输出端与使能切换模块连接,以给使能切换模块供电;
13.所述使能切换模块的输入端还与交互系统的操作开关连接,根据操纵方式切换开关的命令发送电压信号至主操纵部件或便携操纵部件以实现切换。
14.所述使能切换模块为互锁结构,且只能使能主操纵部件或便携操纵部件。
15.所述主操纵部件,包括:主操纵信息采集板卡以及与其连接的主操纵杆和副操纵杆,所述主操纵信号采集卡与使能切换模块连接,以接收通信及逻辑控制模块的电压信号;
16.所述主操纵杆或副操纵杆于主信号采集卡输出的操纵电压为模拟量,信号采集板卡进行采集,信号采集板卡将采集的模拟量进行数字化处理后,通过串口总线方式传输至主控单元。
17.所述便携操纵部件,为移动式操纵部件,包括:便携操纵杆,固定板,便携信号采集板卡以及控制盒;其中,所述固定板与控制盒连接,所述控制盒内设有便携信号采集板卡,固定板上设有通孔,便携操纵杆底端嵌入通孔中并与便携信号采集板卡连接,所述控制盒上设有信号输出孔,控制盒内的便携信号采集板卡通过线缆与主控单元连接。
18.所述主控单元,包括:串口/网络模块与主控模块;
19.所述串口/网络模块分别与主信号采集板卡和便携信号采集板卡连接,用于将主操纵部件或便携操纵部件的操纵信号转换为网络信号,并将网络信号发送至主控模块;
20.所述主控模块,用于接收串口/网络模块转化操纵信号的网络信号,对推进器控制量分配,并通过以太网传输至舱外单元。
21.所述舱外单元,包括:相互连接的驱动模块和应急模块;
22.所述驱动模块与主控单元连接,用于解析主控单元的推进器执行控制量,进行数字量/模拟量转换,以做为潜水器终端控制量;
23.所述应急模块的输入端分别通过串口与主信号采集卡、便携信号采集卡以及交互系统的程控应急开关连接,输出端与rov推进器连接,通过程控应急开关选择应急模式,主操纵部件或便携操纵部件直接传输操纵信号至应急模块,应急模块对操纵部件的串口信号转换为推进器控制电压,进而推进器控制。
24.一种载人潜水器安全操纵控制方法,包括以下步骤:
25.1)在系统运行后,通过交互系统的操作开关,进行选择使能主操纵部件或便携操纵部件;
26.2)当使能切换模块发送电压信号至主操纵部件或便携操纵部件时,由供电模块进行供电,主操纵部件的操纵杆输出的操纵电压为模拟量,主信号采集板卡将采集的模拟量
进行数字化处理,通过串口总线方式传输至主控系统中的串口/网络模块;
27.3)主控系统中的串口/网络模块将主操纵部件或便携操纵部件的操纵信号经由串口/网络模块转换为网络信号后形成操纵命令,通过以太网传输至主控模块;
28.4)主控模块采集主操纵部件或便携操纵部件的操纵命令,根据潜水器推力分配矩阵进行推进器控制量分配,并通过以太网传输至后端驱动模块;
29.5)驱动模块解析主控单元的推进器执行控制量,进行数字量/模拟量转换,做为潜水器终端控制量,实现潜水器的控制;
30.6)当操纵信号传输链路出现故障导致操纵信号无法传输时,通过交互单元程控应急开关,将操纵模式切换至应急操纵模式,实现应急处理。
31.所述步骤6)具体为:
32.应急模块的输入信号包括程控模式下驱动模块输出的操纵信号与应急模式下操纵部件直接传输的操纵信号;
33.在程控模式下,应急模块将驱动模块的输出信号直接传输至推进器进行控制,在应急模式下,应急模块对主操纵部件串口信号进行隔离、推力分配、转换处理,最终转换为推进器控制电压进行推进器控制。
34.本发明具有以下有益效果及优点:
35.1、结构简单,便于维护。本发明的核心检测电路均为自主设计研发,所选用的器件成本低,设计巧妙,电路结构简单,便于后期维护升级。
36.2、可靠性高、安全性强。本发明的电路具有供电及自动逻辑保护功能,保证系统持续可靠稳定工作,多种操纵方式,保证潜水器及人身安全。
37.3、通用性强。本发明可不仅可以应用于载人潜水器,也可应用于无人潜水器及其他需操纵控制的装备。
附图说明
38.图1为本发明舱内布置示意图;
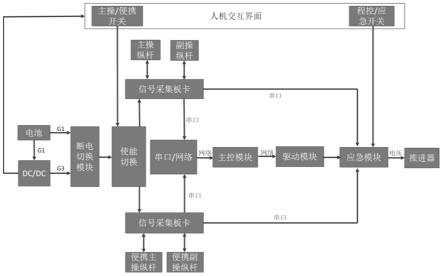
39.图2为本发明的工作原理图;
40.图3为本发明的便携操纵部件示意图。
具体实施方式
41.下面结合附图及实施例对本发明做进一步的详细说明。
42.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
43.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
44.本发明涉及载人潜水器安全操纵控制装置,该装置分布安装于载人潜水器载人舱内与载人舱外耐压罐中,由主操纵部件及主操纵信息采集板卡、便携操纵部件及便携操纵
信息采集板卡、供电模块、通信及逻辑控制模块、驱动模块、应急模块及辅助电路组成。
45.驱动模块与应急模块组成舱外单元,安装于载人舱外密封耐压罐体中,负责推进器驱动及控制,主操纵部件及主操纵信息采集板卡、便携操纵部件及便携操纵信息采集板卡、供电模块、通信及逻辑控制模块以及主控单元组成舱内单元,负责控制信号输出、供电管理、逻辑控制及操纵切换功能。舱外单元与舱内单元通过以太网及串口通信两种方式进行控制信号传输。在舱内人机交互界面,可进行切换选择主操纵部件或便携操纵部件进行潜水器操纵,每种操纵部件均可执行程控操纵控制与应急操纵控制,通过人机界面进行操作模式切换。程控操纵模式下,舱内单元与舱外单元以以太网作为通信媒介,应急操纵模式下,以串口总线方式作为通信媒介。本发明结构简单,可靠性高,抗干扰性强。
46.本发明的一种载人潜水器安全操纵控制装置具体包括:舱外单元、设置在潜水器舱内单元的主操纵部件、便携操纵部件、通信及逻辑控制模块、主控单元、供电模块以及交互单元;
47.通信及逻辑控制模块分别与主操纵部件、便携操纵部件和供电模块连接,用于在主操纵部件与便携操纵部件之间的操纵模式切换时,实现线路切换及断电自切换功能;
48.主操纵部件,用于当切换至主操纵控制模式时,将控制潜水器运动的操纵信号发送至主控单元,以实现潜水器的运动控制;主操纵部件还直接与舱外应急模块直连通信;
49.便携操纵部件,与主控单元通过信号线缆连接,用于当切换至便携操作模式时,将控制潜水器运动的操纵信号发送至主控单元;便携操作部件还直接与舱外应急模块直接通信;
50.主控单元,与舱外单元进行通信,用于接收来自主操纵部件或便携操纵部件的操纵信号,并将操纵信号转化为网络信号并发送至舱外单元进行驱动输出;
51.交互单元,包括操纵方式切换开关和程控应急开关,操纵方式切换开关与通信及逻辑控制模块连接,程控应急开关与舱外应急单元连接,用于切换选择主操纵部件或便携操纵部件进行潜水器操纵,主操纵部件和便携操纵部件部件均可执行程控操纵控制与应急操纵控制。
52.通信及逻辑控制模块包括:断电切换模块以及与其连接的使能切换模块;
53.断电切换模块输入端与供电模块连接,输出端与使能切换模块连接,以给使能切换模块供电;
54.使能切换模块的输入端还与交互系统的操作开关连接,根据操纵方式切换开关的命令发送电压信号至主操纵部件或便携操纵部件以实现切换。
55.使能切换模块为互锁结构,且只能使能主操纵部件或便携操纵部件。
56.主操纵部件,包括:主操纵信息采集板卡以及与其连接的主操纵杆和副操纵杆,主操纵信号采集卡与使能切换模块连接,以接收通信及逻辑控制模块的电压信号;
57.主操纵杆或副操纵杆于主信号采集卡输出的操纵电压为模拟量,信号采集板卡进行采集,信号采集板卡将采集的模拟量进行数字化处理后,通过串口总线方式传输至主控单元。
58.便携操纵部件,为移动式操纵部件,如图3所示,包括:便携操纵杆,固定板,便携信号采集板卡以及控制盒;其中,所述固定板与控制盒连接,所述控制盒内设有便携信号采集板卡,固定板上设有通孔,便携操纵杆底端嵌入通孔中并与便携信号采集板卡连接,所述控
制盒上设有信号输出孔,控制盒内的便携信号采集板卡通过线缆与主控单元连接。
59.主控单元,包括:串口/网络模块与主控模块;
60.串口/网络模块分别与主信号采集板卡和便携信号采集板卡连接,用于将主操纵部件或便携操纵部件的操纵信号转换为网络信号,并将网络信号发送至主控模块;
61.主控模块,用于接收串口/网络模块转化操纵信号的网络信号,对推进器控制量分配,并通过以太网传输至舱外单元。
62.舱外单元,包括:相互连接的驱动模块和应急模块;
63.驱动模块与主控单元连接,用于解析主控单元的推进器执行控制量,进行数字量/模拟量转换,以做为潜水器终端控制量;
64.应急模块的输入端分别通过串口与主信号采集卡、便携信号采集卡以及交互系统的程控应急开关连接,输出端与rov推进器连接,通过程控应急开关选择应急模式,主操纵部件或便携操纵部件直接传输操纵信号至应急模块,应急模块对操纵部件的串口信号转换为推进器控制电压,进而推进器控制。
65.本发明的一种载人潜水器安全操纵控制方法,包括以下步骤:
66.1)在系统运行后,通过交互系统的操作开关,进行选择使能主操纵部件或便携操纵部件;
67.2)当使能切换模块发送电压信号至主操纵部件或便携操纵部件时,由供电模块进行供电,主操纵部件的操纵杆输出的操纵电压为模拟量,主信号采集板卡将采集的模拟量进行数字化处理,通过串口总线方式传输至主控系统中的串口/网络模块;
68.3)主控系统中的串口/网络模块将主操纵部件或便携操纵部件的操纵信号经由串口/网络模块转换为网络信号后形成操纵命令,通过以太网传输至主控模块;
69.4)主控模块采集主操纵部件或便携操纵部件的操纵命令,根据潜水器推力分配矩阵进行推进器控制量分配,并通过以太网传输至后端驱动模块;
70.5)驱动模块解析主控单元的推进器执行控制量,进行数字量/模拟量转换,做为潜水器终端控制量,实现潜水器的控制;
71.6)当操纵信号传输链路出现故障导致操纵信号无法传输时,通过交互单元程控应急开关,将操纵模式切换至应急操纵模式,实现应急处理。
72.本发明采用的具体实现方法如下:
73.本装置工作原理如图2所示。
74.载人潜水器为无缆潜水器,控制系统电力源为潜水所带24v蓄电池组,蓄电池组的电源为非隔离电g1,为了安全与稳定,载人舱内供电经过dc/dc进行隔离稳压,隔离后电源为隔离电g3,由于本装置的控制需要,非隔离电g1引入控制系统。
75.操纵部件供电首先经过断电切换模块,该模块输入为g1与g3,由g3作为该模块的控制电,在正常情况下,该模块输出g3至下一模块,当舱内g3失效时,自动切换至g1输出,继续为操纵部件供电,无需手动切换,保持操纵部件的供电持续性。
76.主操纵部件与便携操纵部件,在系统运行后,为防止无操作,均处于非使能状态,无操纵控制输出,通过人机交互界面的“主操/便携”使能开关,可以进行选择使能主操纵部件或便携操纵部件,为防止主操纵与便携操纵同时输出控制信号导致控制逻辑混乱,使能模块具有互锁结构,同一时刻只能使能单个操纵部件。
77.当使能主操纵部件时,默认由g3进行供电,主操纵部件为分体式结构,主操纵杆与副操纵杆安装于舱内驾驶台两侧,如图1,安装位置根据人体工程学进行设置,操纵杆输出的操纵电压为模拟量,该模拟量由安装于驾驶台内部的信号采集板卡进行采集,信号采集板卡将采集的模拟量进行数字化处理,根据操纵通信协议格式,通过串口总线方式传输至串口/网络模块,通过串口总线方式传输可有效抑制外界信号干扰。
78.当使能便携操纵部件时,默认由g3进行供电,便携操纵部件为一体式结构,如图3所示,由主操纵杆、副操纵杆及操纵杆信号采集板卡组成手持式操纵部件,潜航员可手持该部件进行潜水器运动操纵,便于潜航员在近观察窗进行外部观察的同时进行潜水器操纵,同时不同的潜航员可根据自己的操纵习惯进行选择操纵部件。操纵杆输出的操纵电压为模拟量,信号采集板卡进行采集,信号采集板卡将采集的模拟量进行数字化处理后,通过串口总线方式传输至串口/网络模块。便携操纵部件除具有潜水器操纵功能外,集成了潜水器部分自动控制功能的触发功能,便于操作。
79.主控单元包括串口/网络模块与主控模块。主操纵部件与便携操纵部件的操纵信号经由串口/网络模块转换为网络信号后,通过以太网传输至主控模块,主控模块采集操纵部件的操纵命令,根据潜水器推力分配矩阵进行推进器控制量分配,并通过以太网传输至后端驱动执行模块,以实现前进/后退,左转/右转,上浮/下潜,前倾/后倾,左倾/后倾等五个自由度的潜水器操纵控制。
80.驱动模块解析主控单元的推进器执行控制量,进行逆向数字量/模拟量转换,做为潜水器终端控制量。
81.上述主操纵部件与便携操纵部件的操纵控制为程控模式下操纵控制,除程控模式外,主操纵与便携操纵均可进行应急模式操纵,保证潜水器在非正常状态下仍具有运动操纵功能。
82.应急模式切换包括手动切换与自动切换,均适用于主操纵部件与便携操纵部件。
83.在程控模式下,当操纵信号传输链路出现故障导致操纵信号无法传输时,可以通过人机交互界面中的“程控/应急”开关,将操纵模式切换至应急操纵模式。此外,当操纵部件供电信号g3因故障断电时,断电切换模块会自动切换至g1为操纵部件继续供电,保证操纵部件正常运行。在应急模式下,操纵部件的推进器操纵信号以串口总线形式直接穿舱传输至应急模块。
84.应急模块的输入信号包括程控模式下驱动模块输出的操纵信号与应急模式下操纵部件直接传输的操纵信号。在程控模式下,应急模块将驱动模块的输出信号直接传输至推进器进行控制,在应急模式下,应急模块对操纵部件串口信号进行隔离、推力分配、转换等处理,最终转换为推进器控制电压进行推进器控制。
85.应急模块为嵌入式模块,进行推进器控制时,同样需要根据推力分配矩阵进行推进器控制量分配计算,保证潜水器多自由度灵活控制,而非简单的直接控制模式。当载人舱内控制电g3因故失电时,应急模块自动将操纵模式切换至应急模式,保证推进器操纵控制功能正常。
86.综上所述,载人潜水器安全操纵控制装置包括了主操纵部件与便携操纵部件,二者之间可以互为备份,又具备各自的特点,在工作模式上包括程控模式与应急模式两种模式,且具备自动切换功能,所以载人潜水器安全操纵控制装置实现了四种潜水器操纵方式,
该装置即可应用于载人潜水器,又可应用于无人潜水器以及需要进行操纵控制的装备,充分保证了装备操纵的可靠性,稳定性与安全性。
87.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1