一种半潜船主推进系统半监督故障诊断方法
1.本发明属于故障诊断领域,具体涉及一种半潜船主推进系统半监督故障诊断方法。
背景技术:
2.半潜船的主要用途是大件货物及装备的长距离运送,因此其长距离航行中推进系统的安全可靠性是半潜船服役的重要监测指标。对于采用常规轴系螺旋桨半潜船的推进系统配置有主推进系统、首部推机器以及尾部推进器,其中主推进系统包括推进电机、减速齿轮箱、长轴系和定距桨。
3.半潜船推进系统旋转部件在高温高压的潮湿环境中长期服役,可能发生主轴系、轴承、齿轮等部件故障,对半潜船工作造成严重影响。当前,半潜船推进系统整体系统状态的故障智能诊断仍然是一个挑战。特别是在不同海况下,由于不同传感器接收的损伤表征有所区别,如何综合多传感器融合诊断的问题尚未解决。
技术实现要素:
4.本发明旨在至少解决上述技术问题之一,为此,本发明的目的在于提出一种针对半潜船推进系统运行状态的多传感器半监督诊断方法。根据服役过程中采集的半潜船推进系统状态数据,本发明可以通过正常状态的监测信号完成监测模型的参数训练,从而获取推进系统整体运行状态的异常状态指标。
5.本发明的目的至少通过如下技术方案之一实现。
6.一种半潜船主推进系统半监督故障诊断方法,包括以下步骤:
7.s1、利用不同传感器实时监测半潜船主推进系统的状态信号,获取多传感器监测信号数据;
8.s2、利用卷积编码网络对多传感器监测信号进行重构降维,实现不同传感器监测信号维度对齐;
9.s3、利用变分自编码网络可以对多传感器监测信号进行概率重构,将重构误差作为当前半潜船主推进系统整体运行状态的故障程度指标,当指标大于所设阈值时视为故障状态。
10.进一步地,步骤s1中,实时监测的半潜船主推进系统的状态信号包括推进电机的振动加速度信号、减速齿轮箱的振动加速度信号、长轴系的转速信号、推进电机的温度信号、减速齿轮箱的温度信号、减速齿轮箱的油压信号、推进电机输入及输出的电压、电流信号;获取的多传感器监测信号需要进行滤波降噪的信号预处理,随后将其退化特征数据集作为变分自编码网络的输入用以故障识别,将输入信号的网络重构误差作为当前半潜船主推进系统整体运行状态的故障程度指标。
11.进一步地,振动加速度信号利用三向加速度传感器分别在减速齿轮箱和推进电机的壳体、基座、电机圆柱体表面、减速齿轮箱轴承座位置获取,温度信号通过非接触式红外
测温传感器获取,推进电机输入及输出的电信号通过电流电压传感器获取,长轴系转速信号通过编码器方式进行采集。
12.进一步地,对获取的多传感器监测信号进行信号预处理,具体如下:
13.通过三层小波滤波对监测信号进行降噪处理,母小波采用morlet小波,降噪之后将所有信号归一化至[
‑
1,1]。
[0014]
进一步地,步骤s2中,通过卷积编码网络对不同传感器信号采集的半潜船推进系统监测信号分别进行重构降维;卷积编码网络的最后一层卷积只使用一个卷积核,并在卷积之后加入全连接层,全连接层的单元节点数设置为r
d
;在隐层表示中,所有传感器的信号维度被压缩为r
d
,使得不同信号的维度对齐。
[0015]
进一步地,为了便于后续可视化特征分析,卷积过程需要保留各类传感器监测信号的变化趋势;卷积过程采用relu函数保留不同传感器信号的基本波形特征:
[0016][0017]
其中,y
i
为激活之后的单元节点值,x
i
为上一层单元节点值的加权和。
[0018]
进一步地,步骤s3中,通过具有多个隐藏层的变分自编码网络获取半潜船主推进系统当前状态指标,具体如下:
[0019]
设定异常判定阈值α,然后通过变分自编码网络获取正常状态数据隐变量分布的均值和方差,并通过n(0,1)采样获得随机数ε,把随机数ε联合隐变量分布参数求取隐变量z,最后利用解码器将隐变量重构成原始输入,并将重构误差作为半潜船主推进系统当前状态指标。
[0020]
进一步地,所述具有多个隐藏层的变分自编码网络通过重构误差和kl散度正则化损失联合训练防止数据的过拟合;采用均方误差函数和adam优化器对变分自编码网络进行参数更新,参数更新的学习率设置为0.001;
[0021]
在测试阶段,将半潜船推进系统监测到的测试信号经过变分自编码网络的重构误差作为异常值,当异常值大于所定阈值时可判定当前主推进系统处于异常状态。
[0022]
与现有技术相比,本发明的有益成果包括:
[0023]
本发明可以解决半潜船主推进系统状态监测的多传感器特征融合问题,并输出相应的异常指标。根据半潜船服役的实际需求,本发明可以仅通过正常状态下的多传感器监测信号优化模型参数,从而获取异常状态指标。
附图说明
[0024]
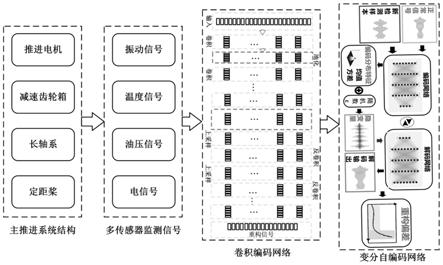
图1是本发明实施例中半潜船推进系统故障诊断流程图;
[0025]
图2是本发明实施例中卷积自编码网络结构示意图;
[0026]
图3是本发明实施例中变分自编码网络示意图。
具体实施方式
[0027]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图并举实施例,对本发明的具体实施进行详细说明。
[0028]
实施例:
[0029]
一种半潜船主推进系统半监督故障诊断方法,如图1所示,包括以下步骤:
[0030]
s1、利用不同传感器实时监测半潜船主推进系统的状态信号,获取多传感器监测信号数据;
[0031]
实时监测的半潜船主推进系统的状态信号包括推进电机的振动加速度信号、减速齿轮箱的振动加速度信号、长轴系的转速信号、推进电机的温度信号、减速齿轮箱的温度信号、减速齿轮箱的油压信号、推进电机输入及输出的电压、电流信号;
[0032]
振动加速度信号利用三向加速度传感器分别在减速齿轮箱和推进电机的壳体、基座、电机圆柱体表面、减速齿轮箱轴承座位置获取,温度信号通过非接触式红外测温传感器获取,推进电机输入及输出的电信号通过电流电压传感器获取,长轴系转速信号通过编码器方式进行采集。
[0033]
获取的多传感器监测信号需要进行滤波降噪的信号预处理,具体如下:
[0034]
通过三层小波滤波对监测信号进行降噪处理,母小波采用morlet小波,降噪之后将所有信号归一化至[
‑
1,1]。
[0035]
随后将其退化特征数据集作为变分自编码网络的输入用以故障识别,将输入信号的网络重构误差作为当前半潜船主推进系统整体运行状态的故障程度指标。
[0036]
s2、利用卷积编码网络对多传感器监测信号进行重构降维,实现不同传感器监测信号维度对齐;
[0037]
如图2所示,通过卷积编码网络对不同传感器信号采集的半潜船推进系统监测信号分别进行重构降维;卷积编码网络的最后一层卷积只使用一个卷积核,并在卷积之后加入全连接层,全连接层的单元节点数设置为r
d
;在隐层表示中,所有传感器的信号维度被压缩为r
d
,使得不同信号的维度对齐。
[0038]
为了便于后续可视化特征分析,卷积过程需要保留各类传感器监测信号的变化趋势;卷积过程采用relu函数保留不同传感器信号的基本波形特征:
[0039][0040]
其中,y
i
为激活之后的单元节点值,x
i
为上一层单元节点值的加权和。
[0041]
s3、如图3所示,利用变分自编码网络可以对多传感器监测信号进行概率重构,将重构误差作为当前半潜船主推进系统整体运行状态的故障程度指标,当指标大于所设阈值时视为故障状态。
[0042]
通过具有多个隐藏层的变分自编码网络获取半潜船主推进系统当前状态指标,具体如下:
[0043]
设定异常判定阈值α,然后通过变分自编码网络获取正常状态数据隐变量分布的均值和方差,并通过n(0,1)采样获得随机数ε,把随机数ε联合隐变量分布参数求取隐变量z,最后利用解码器将隐变量重构成原始输入,并将重构误差作为半潜船主推进系统当前状态指标。
[0044]
所述具有多个隐藏层的变分自编码网络通过重构误差和kl散度正则化损失联合训练防止数据的过拟合;采用均方误差函数和adam优化器对变分自编码网络进行参数更新,参数更新的学习率设置为0.001;
[0045]
在测试阶段,将半潜船推进系统监测到的测试信号经过变分自编码网络的重构误
差作为异常值,当异常值大于所定阈值时可判定当前主推进系统处于异常状态。
[0046]
需要说明的是,任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式上及细节上进行变更和修改。因此,对本发明的一些等同修改和变更也应当在本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1