爬行机器人及其行走机构的制作方法
1.本申请涉及爬行机器人的领域,尤其是涉及一种爬行机器人及其行走机构。
背景技术:
2.近半个世纪以来,中国在船舶工业方面取得了辉煌的发展,船舶建造、修理和贸易都取得了辉煌成就,船舶工业随之在国民经济中的地位也显著提高。但是,由于船舶外壁长期沉浸在海水中,船舶外壁会受海水的侵蚀,随着船舶使用时间的增加,船舶外壁不可避免的会发生锈蚀,为了提高船舶的使用寿命和增加船舶使用安全性,当船舶外壁锈蚀到一定的程度时必须进行除锈清洗,并重新喷涂涂料,以保护船舶外壁。
3.相关技术中,人们通常使用爬行机器人对船舶进行清洗,其工作原理是带有四个车轮的爬行机器人在船舶表面上行走,与此同时,工作头对船舶表面施加高压水流冲击,以去除船舶表面的锈蚀。
4.针对上述中的相关技术,发明人认为存在有爬行机器人在船舶表面行走不够灵活的缺陷。
技术实现要素:
5.为了解决爬行机器人在船舶表面行走不够灵活的缺陷,第一方面,本申请提供一种爬行机器人的行走机构,采用如下的技术方案:
6.一种爬行机器人的行走机构,包括架体、四个麦克纳姆轮以及四个驱动件,所述架体包括两个底座和用于连接两个底座的横梁,四个所述麦克纳姆轮两两一组,一组所述麦克纳姆轮连接在一个底座上,且一组两个的所述麦克纳姆轮分别转动连接在底座沿长度方向的两侧,四个所述驱动件均设置在架体上且与四个麦克纳姆轮一一对应,各个所述驱动件驱动对应的麦克纳姆轮转动,所述底座上设有磁性件。
7.通过采用上述技术方案,架体通过磁性件吸附向工作面,而四个麦克纳姆轮则对架体进行支撑,使得架体可以在工作面上稳定的行走并且不会掉落;四个驱动件则可以驱动四个麦克纳姆轮以不同的速度、方向进行转动,从而控制架体沿各个方向灵活的移动。
8.优选的,所述驱动件包括驱动电机、主动轮和从动轮,所述驱动电机固设在架体上,所述驱动电机的输出端与主动轮连接并驱动主动轮转动,所述从动轮同轴连接在麦克纳姆轮背离底座的一侧,所述主动轮和从动轮之间通过链条连接。
9.通过采用上述技术方案,驱动电机工作时,驱动电机的输出端通过链条带动从动轮转动,从动轮再带动麦克纳姆轮转动;并且从动轮是从麦克纳姆轮背离底座的一侧对麦克纳姆轮施加驱动力的,麦克纳姆轮的朝向底座的一侧则转动连接在底座上,此时麦克纳姆轮的两侧受力,更加均匀,因此麦克纳姆轮的工作稳定性好。
10.优选的,所述横梁上连接有与两个底座对应的两个竖杆,所述竖杆朝向底座的一侧连接有连接板,其中一个所述竖杆上的连接板铰接在底座沿长度方向的两侧并与底座上表面之间具有空隙,所述底座上螺纹连接有若干限位螺栓,若干所述限位螺栓分布在连接
板转动方向的两侧,且所述限位螺栓与连接板的外缘之间具有间隙。
11.通过采用上述技术方案,行走机构在工作面上行走遇到凹凸不平处时,底座可以绕着与连接板的铰接点偏转,从而使得底座可以灵活快捷的越障;同时,当限位螺栓与连接板两侧面抵触时,可以限制底座继续转动,从而对底座的偏转角度进行限制,以防底座转动幅度过大而使得磁性件对工作面产生的吸力过大或过小的情况发生,保证行走机构的稳定性。
12.优选的,所述磁性件包括安装盒和若干磁铁,若干所述磁铁呈海尔贝克阵列排布在安装盒内,所述安装盒可拆卸连接在底座上。
13.通过采用上述技术方案,操作者可以快速便捷的将安装盒安装在底座上,从而快速的完成磁性件的安装,减少磁铁的安装难度。
14.优选的,所述安装盒朝向工作面的一面设为底面,所述底面沿底座长度方向的两边设有倒角。
15.通过采用上述技术方案,爬行机器人在工作面上行走遇到凹凸不平处时,倒角的设置可以减少底座与工作面接触的可能,从而减少底座卡死的可能,提高爬行机器人的越障能力。
16.第二方面,本申请提供一种爬行机器人,采用如下的技术方案:
17.一种爬行机器人,包括上述的行走机构、工作头和档杆,所述工作头连接在横梁上,所述档杆的两端分别通过限位件固定在两个竖杆上。
18.通过采用上述技术方案,需要对工作头进行检修时,操作者可以解除限位件对竖杆的限制,然后将档杆取下,腾出空间以便于拆卸工作头。
19.优选的,所述限位件包括插销,所述插销外缘设有花键,所述竖杆远离底座的一端开设有与花键相配合的插槽,所述档杆上开设有供插销穿过的通孔。
20.通过采用上述技术方案,需要对档杆进行限位时,操作者将档杆上的通孔与插槽相对应,然后将插销穿过通孔并插接在插槽内,从而快速便捷的将档杆与竖杆相固定。
附图说明
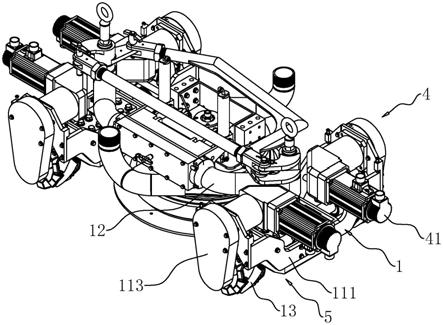
21.图1是实施例1用于体现爬行机器人的行走机构的整体结构示意图。
22.图2是实施例1隐藏了防护罩后的结构示意图。
23.图3是实施例1用于体现架体的结构示意图。
24.图4是实施例1用于体现磁性件的结构示意图。
25.图5是实施例1用于体现其中一个竖杆与底座的连接结构示意图。
26.图6是实施例1用于体现另一个竖杆与底座的连接结构示意图。
27.图7是实施例2用于体现爬行机器人的整体结构示意图。
28.图8是图7中a部分结构的放大图。
29.附图标记说明:1、架体;11、底座;110、固定板;111、支撑板;112、承载板;113、防护罩;12、横梁;121、竖杆;122、连接板;123、限位螺栓;124、空隙;13、麦克纳姆轮;2、工作头;3、档杆;4、驱动件;41、驱动电机;42、主动轮;43、从动轮;5、磁性件;51、安装盒;52、倒角;6、限位件;61、插销;62、花键;63、通孔。
具体实施方式
30.以下结合附图1
‑
6对本申请作进一步详细说明。
31.实施例1:本申请实施例公开一种爬行机器人的行走机构。参照图1,爬行机器人的行走机构包括架体1、驱动件4和磁性件5。
32.参照图2和图3,架体1包括两个底座11和一根横梁12,横梁12的两端分别固定在两个底座11上以连接两个底座11。每个底座11沿长度方向的两侧分别通过轴承转动连接有一个麦克纳姆轮13,此时两个底座11上均具有两个一组的麦克纳姆轮13,共计四个。底座11顶部沿竖直方向固设有两个固定板110,两个固定板110通过螺栓同时连接有两个支撑板111,两个支撑板111分别位于底座11沿宽度方向的两侧,且均沿底座11的长度方向设置,两个支撑板111沿底座11长度方向的两端通过承载板112连接,且每个承载板112上均设置有一个用于驱动麦克纳姆轮13转动的驱动件4。
33.参照图2,驱动件4包括驱动电机41、主动轮42和从动轮43,驱动电机41固设在承载板112上,驱动电机41的输出端穿过承载板112并与主动轮42同轴连接,从动轮43同轴连接在麦克纳姆轮13背离底座11的一侧,主动轮42与从动轮43之间通过链条连接,驱动电机41工作时,即可驱动麦克纳姆轮13转动,当四个驱动电机41同时工作时,通过调整各个驱动电机41的转速和转向,即可使得底座11在工作面上向各个方向移动。
34.参照图1和图2,承载板112上固设有防护罩113,防护罩113罩设在主动轮42和从动轮43背离麦克纳姆轮13的一侧,从而将主动轮42和从动轮43保护起来,减少工作人员直接接触到主动轮42和从动轮43的可能。
35.参照图4,磁性件5设置在底座11上,磁性件5包括安装盒51和若干磁铁,若干磁铁呈海尔贝克阵列排布在安装盒51内,安装盒51朝向底座11的一侧通过若干螺栓固定在底座11上,从而快速便捷的将磁性件5与底座11连接,并且此时安装盒51与工作面之间具有间隙,由于工作面由钢或铁制成,因此磁性件5可以与工作面之间产生强大的吸引力,以保证爬行机器人可以灵活稳定的在工作面上移动。需要更换磁性件5时,操作者直接拧下连接安装盒51和底座11的螺栓即可,拆卸安装都十分方便。安装盒51朝向朝向工作面的一面设为底面,底面沿底座11长度方向的两边设有倒角52,倒角52的角度设置为15
°
~30
°
,倒角52可以减少底座11与工作面接触的可能,从而减少底座11卡死的可能,提高爬行机器人的越障能力。
36.参照图4和图5,横梁12上固定连接有与两个底座11相对应的两个竖杆121,每个竖杆121朝向底座11的一侧均固定连接有两个连接板122,两个连接板122同时铰接在底座11沿长度方向的两侧。其中一个竖杆121上的连接板122与底座11上表面贴合。
37.参照图4和图6,另一个竖杆121上的连接板122与底座11之间具有空隙124,使得此竖杆121上的两个连接板122可以沿底座11的长度方向转动。底座11沿自身长度方向且在连接板122的两侧螺纹连接有若干限位螺栓123,连接板122两侧最靠近连接板122的限位螺栓123与连接板122之间具有间隙,使得这个底座11可以绕着底座11与连接板122的铰接点转动一定角度,因此底座11可以在工作面上灵活快捷的越障;当底座11的转动幅度过大时,连接板122抵触在限位螺栓123上,从而限制了底座11继续转动,以对底座11的偏转角度进行限制,保证行走机构的工作稳定性。
38.参照图4和图6,一个底座11可转动、另一个底座11无法转动的设置,既可以保证行
走机构的越障能力,又可以使得至少一个磁性件5对工作面进行高强度吸引,保证行走机构与工作面之间的吸附稳定性。
39.本申请实施例一种爬行机器人的行走机构的实施原理为:两个底座11通过四个麦克纳姆轮13支撑在工作面上,并通过磁性件5与工作面之间具有吸引力,从而保证爬行机器人可以稳定的吸附在工作面上。需要驱动爬行机器人行走时,四个驱动电机41均单独工作,可以给予四个麦克纳姆轮13不同的转速和转向,从而驱动爬行机器人在工作面上沿任意方向移动,提高了爬行机器人的灵活度。当爬行机器人遇到障碍时,底座11可以小幅度转动,从而便于麦克纳姆轮13越过障碍,提高爬行机器人的越障能力。
40.实施例2:本申请实施例公开一种爬行机器人,参考图7和图8,爬行机器人包括实施例1中的爬行机器人的行走机构、工作头2以及档杆3,工作头2连接在横梁12上,且工作头2与工作面相贴合。档杆3位于工作头2上方,且档杆3的两端均通过限位件6固定在两个竖杆121上,限位件6包括插销61,插销61的外缘设有花键62,档杆3上开设有供插销61穿过的通孔63,竖杆121远离底座11的一端开设有插槽,通孔63与插槽的形状一致并与花键62相配合。
41.本申请实施例一种爬行机器人的实施原理为:操作者首先将工作头2安装在横梁12上。安装档杆3时,操作者将档杆3两端的通孔63与插槽对齐,然后插入插销61,插销61通过花键62与插槽相卡紧,从而快速便捷的将档杆3固定在两个竖杆121上,此时档杆3可以对工作头2起到一个保护作用。需要拆卸工作头2进行检修时,操作者直接拔除插销61,即可取下档杆3,以便于露出工作头2进行检修。
42.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1