潜艇喷淋控制方法及装置与流程
1.本发明涉及潜艇喷淋技术领域,尤其涉及潜艇喷淋控制方法及装置。
背景技术:
2.现在对停靠在港口的潜艇露出水面的部分主要是消声瓦进行喷淋降温时,通常都是采用管网形式进行喷淋。管网式喷淋装置缺点是设备庞大,结构复杂,只能安装于固定位置,无法根据潜艇大小和位置灵活设置及喷淋。
技术实现要素:
3.本发明所要解决的技术问题是提供结构简单,控制方便,使用灵活,且喷淋准确的潜艇喷淋控制方法及装置。
4.本发明是通过以下技术方案予以实现:
5.潜艇喷淋控制方法,其包括如下操作步骤:
6.第一步,操作者通过触摸屏设定参数,包括潜艇长度及喷头与潜艇的垂直距离,并将信息传递给plc,plc计算出喷头水平和垂直的运动角速度,计算过程如下:
7.由h=1/2*g*t2,d=2*cosα*v*t,tanα=2h/d;
8.推算出:
9.d=2*sin2α*v2/g;
ꢀꢀ
公式1
10.其中h为喷水高度,d为喷水距离,α为喷水角度,v为喷头出水速度,t为时间,g为重力加速度;
11.喷头水平运动控制角速度为β/t:β=2*arctan((1/2*l)/d),
12.则喷头水平运动控制角速度β/t=2*arctan((1/2*l)/d)/t;
ꢀꢀ
公式2
13.喷头垂直运动控制角速度:首先根据公式1,带入d1和d2,计算出对应的喷水角度α1和α2;
14.则ac角速度为2(α1‑
α2)/t;
ꢀꢀ
公式3
15.cb角速度为2(α2‑
α1)/t;
ꢀꢀ
公式4
16.其中,o为喷头位置,线段ab为潜艇长度,c为o到ab的垂直距离,d1为o到a的喷水距离,d2为o到c的喷水距离,l为潜艇长度,t为喷水从a到b的时间,β为喷水从a到b的角度;
17.第二步,启动装置,装置开始运行;
18.第三步,将喷头转动至初始位置,即对准a点的位置;
19.第四步,水泵供水,喷头开始喷水;
20.第五步,喷头喷水的同时,根据计算出的水平和垂直角速度,喷头进行水平和垂直转动,对准潜艇周期性往复喷水;
21.第六步,喷淋结束,关闭电源。
22.潜艇喷淋装置,其包括机架、人机界面、电控系统、喷头、垂直摇摆机构、水平摇摆机构及水泵,所述人机界面、电控系统及水泵固定安装于机架内,机架内中部还安装有支撑
架,水平摇摆机构安装于支撑架上,垂直摇摆机构安装于水平摇摆机构上,喷头安装于垂直摇摆机构上,水平摇摆机构带动垂直摇摆机构及喷头沿水平方向摆动,垂直摇摆机构带动喷头沿竖直方向摆动。
23.优化的,水平摇摆机构包括通过转轴转动的安装于支撑架上的水平转盘及固定安装于水平转盘上的连接架,转轴由转轴电机驱动旋转。
24.优化的,垂直摇摆机构包括固定安装于连接架上的垂直架、固定安装于连接架上的直线电机、固定安装于垂直架上的竖直滑轨及喷头连接板,所述喷头连接板滑动的安装于竖直滑轨上并由直线电机驱动沿竖直滑轨上下滑动。
25.进一步,连接架上固定安装有喷头安装架,所述喷头前部转动的安装于喷头安装架上,后部穿过喷头连接板并与水泵出水口通过水带连接。
26.进一步,机架内底部固定安装有水平导轨,机架上三面固定安装有护板,支撑架滑动的安装于水平导轨上,机架内安装有水平电动推杆,水平电动推杆的端部与支撑架固定连接。
27.优化的,机架下方安装有活动脚轮。
28.进一步,水泵进水口处安装有波纹管,波纹管与给水管道连通,且给水管道上安装有阀门。
29.本发明的有益效果
30.本发明所保护的一种潜艇喷淋控制方法及装置,具有如下优点:
31.1.结构简单;
32.2.控制方便,使用灵活;
33.3.能够使喷头在运行过程中水平和垂直两个方向转动,使水准确喷洒在潜艇停靠的长方形区域;
34.4.降低了设备及喷淋成本。
附图说明
35.图1为喷洒侧视示意图;
36.图2为喷洒俯视示意图;
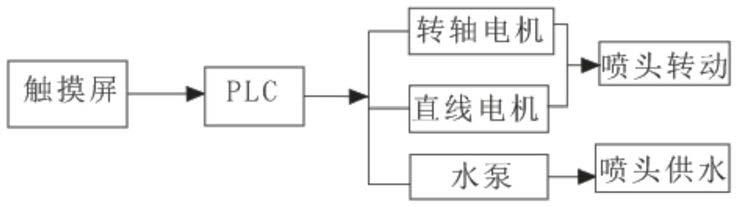
37.图3本发明控制结构示意图;
38.图4本发明运行流程示意图;
39.图5喷淋装置结构示意图之一;
40.图6喷淋装置结构示意图之二;
41.图中1.机架,2.水泵,3.波纹管,4.阀门,5.活动脚轮,6.水平电动推杆,7.电控系统,8.水带,9.垂直架,10.喷头,11.喷头安装架,12.连接架,13.水平转盘,14.支撑架,15.水平导轨,16.喷头连接板,17.竖直滑轨,18.直线电机。
具体实施方式
42.潜艇喷淋控制方法,其包括如下操作步骤:
43.第一步,操作者通过触摸屏设定参数,包括潜艇长度及喷头与潜艇的垂直距离,并将信息传递给plc,plc计算出喷头水平和垂直的运动角速度,计算过程如下:
44.如图1所示,由h=1/2*g*t2,d=2*cosα*v*t,tanα=2h/d;
45.推算出:
46.d=2*sin2α*v2/g;
ꢀꢀ
公式1
47.其中h为喷水高度,d为喷水距离,α为喷水角度,v为喷头出水速度,t为时间,g为重力加速度;
48.由公式1可知,喷水距离与喷水角度相关。
49.喷头水平运动控制角速度为β/t:β=2*arctan((1/2*l)/d),
50.则喷头水平运动控制角速度β/t=2*arctan((1/2*l)/d)/t;
ꢀꢀ
公式2
51.喷头垂直运动控制角速度:首先根据公式1,带入d1和d2,计算出对应的喷水角度α1和α2;
52.则ac角速度为2(α1‑
α2)/t;
ꢀꢀ
公式3
53.cb角速度为2(α2‑
α1)/t;
ꢀꢀ
公式4
54.如图2所示,其中o为喷头位置,线段ab为潜艇长度,c为o到ab的垂直距离,d1为o到a的喷水距离,d2为o到c的喷水距离,l为潜艇长度,t为喷水从a到b的时间,β为喷水从a到b的角度;
55.第二步,启动装置,装置开始运行;
56.第三步,将喷头转动至初始位置,即对准a点的位置;
57.第四步,水泵供水,喷头开始喷水;
58.第五步,喷头喷水的同时,根据计算出的水平和垂直角速度,喷头进行水平和垂直转动,对准潜艇周期性往复喷水;
59.第六步,喷淋结束,关闭电源。
60.本发明提供的潜艇喷淋控制方法,通过精确计算,控制喷头在喷淋时,水平及竖直转动,使落水点始终在潜艇上,对准潜艇周期性往复喷水,实现了潜艇的精准喷淋降温,成本比较低。
61.潜艇喷淋装置,其包括机架1、人机界面(未示出)、电控系统7、喷头10、垂直摇摆机构、水平摇摆机构及水泵2,所述人机界面、电控系统及水泵固定安装于机架内,机架内中部还安装有支撑架14,水平摇摆机构安装于支撑架上,垂直摇摆机构安装于水平摇摆机构上,喷头安装于垂直摇摆机构上,水平摇摆机构带动垂直摇摆机构及喷头沿水平方向摆动,垂直摇摆机构带动喷头沿竖直方向摆动。
62.电控系统将人机界面与水泵、垂直摇摆机构及水平摇摆机构连接在一起,通过人机界面可以实现水泵、垂直摇摆机构及水平摇摆机构的自动控制,使喷头在喷水的同时,在水平摇摆机构的作用下水平摆动,在垂直摇摆机构的作用下竖直摆动,使喷头的落水点为一个矩形区域,始终落在潜艇上,并沿潜艇周期性往复喷水,实现潜艇的精准喷淋降温,并且其较管网式结构简单,使用灵活,而且控制方便,投入成本低。
63.优化的,水平摇摆机构包括通过转轴转动的安装于支撑架上的水平转盘13及固定安装于水平转盘上的连接架12,转轴由转轴电机(未示出)驱动旋转,转轴电机通过转轴带动水平转盘旋转,从而可以通过连接架带动上面的垂直摇摆机构及喷头按照设定角度水平往复摆动。
64.优化的,垂直摇摆机构包括固定安装于连接架上的垂直架9、固定安装于连接架上
的直线电机18、固定安装于垂直架上的竖直滑轨17及喷头连接板16,所述喷头连接板滑动的安装于竖直滑轨上并由直线电机驱动沿竖直滑轨上下滑动,喷头连接板由直线电机驱动沿竖直滑轨上下滑动,使喷头以前部连接点为轴沿竖直方向按照设定角度竖直往复摆动。
65.进一步,连接架上固定安装有喷头安装架11,所述喷头前部转动的安装于喷头安装架上,可以采用铰轴铰接,也可以通过轴承连接,后部穿过喷头连接板并与水泵出水口通过水带8连接。方便喷头在直线电机的驱动下,以铰轴或轴承处为轴竖直往复摆动。
66.进一步,机架内底部固定安装有水平导轨15,机架上三面固定安装有护板(未示出),支撑架滑动的安装于水平导轨上,机架内安装有水平电动推杆6,水平电动推杆的端部与支撑架固定连接。喷淋前,可以通过水平电动推杆将支撑架及上面的设备推出机架外,然后再进行喷水。这样可以使设备的体积更小,使用更加灵活,并且防止喷头或其他设备在旋转过程中碰触到机架或上面的围挡,喷淋完毕后,电动推杆再将支撑架拽回到机架内,并通过外围的护板进行保护,防止设备受到损坏。
67.优化的,机架下方安装有活动脚轮5。使整个喷淋设备方便移动及运输。
68.进一步,水泵进水口处安装有波纹管3,波纹管与给水管道(未示出)连通,且给水管道上安装有阀门4,便于与给水管道连接。
69.综上所述,本发明所保护的潜艇喷淋控制方法及装置,操作者只需设定潜艇长度和与装置的垂直距离,设备自动完成从潜艇头部至尾部的周期性喷淋。装置采用喷头喷洒形式代替管网,运行中喷头可以在水平和垂直两个方向转动,使水准确喷洒在潜艇停靠的长方形区域,并且装置的结构简单,操作方便,使用灵活,成本低。
70.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1