水下机器人自动脱缆装置
1.本发明涉及水下机器人的技术领域,特别是涉及面向水下机器人的自动脱缆装置。
背景技术:
2.自主水下机器人无人无缆自主开展水下检测作业任务,相比有缆遥控水下机器人具有作业范围广、抗流能力强等优点。但是,在长距离输水隧洞检测任务中,水下机器人在进入隧洞的过程中面临复杂、不确定的外部环境,这对自主水下机器人的智能化程度提出了很高的要求,自主水下机器人在进入隧洞过程会遇到各种障碍,难以顺利进入到隧洞中。
3.为此,本发明提出一种面向自主水下机器人通信的自动脱缆装置,使其在进入隧洞过程中能够通过有缆模式由岸上人员遥控操作,而在进入隧洞后能够脱缆切换为自主作业模式,具备快速通信、快速脱离、水密性好等优势。
技术实现要素:
4.基于此,本发明提供一种水下机器人自动脱缆装置,使水下机器人在进入隧洞过程中能够通过有缆模式由岸上人员遥控操作,而在进入隧洞后能够脱缆切换为自主作业模式,具备快速通信、快速脱离、水密性好的优点。
5.为了解决上述背景技术中的问题,本发明提供了如下的技术方案:
6.水下机器人自动脱缆装置,包括电缆无线通讯舱和机器人无线通讯舱,所述电缆无线通讯舱和机器人无线通讯舱之间通过自动脱离杠杆机构连接,所述电缆无线通讯舱的一端侧壁上设置有第一侧耳,所述机器人无线通讯舱的一端侧壁上设置有第二侧耳,且所述第二侧耳上开设有卡位凹槽;
7.所述自动脱离杠杆机构包括失电型电磁铁、弹簧、转动销轴、杠杆、铁块,所述失电型电磁铁和所述弹簧均设置在所述电缆无线通讯舱靠近所述第一侧耳的一端面上,所述杠杆的一端设置有u型挂钩,且所述杠杆的一端通过转动销轴与所述第一侧耳可转动连接,所述u型挂钩与所述卡位凹槽相配合连接,所述杠杆的另一端设置有与所述失电型电磁铁配合的铁块,所述弹簧远离所述电缆无线通讯舱的一端与所述机器人无线通讯舱相抵接;
8.所述失电型电磁铁在通电时,能够失去对所述铁块的吸力,使得所述机器人无线通讯舱在所述弹簧的弹力下弹开,所述杠杆绕所述转动销轴转动,所述u型挂钩与所述卡位凹槽脱离。
9.在其中一个实施例中,所述电缆无线通讯舱包括电缆无线通讯舱体、第一左端盖和第一右端盖,所述第一左端盖和所述第一右端盖分别安装在所述电缆无线通讯舱体的左右两端,且所述第一左端盖和第一右端盖上均设置有第一密封圈。
10.在其中一个实施例中,所述第一左端盖上设置有电缆,所述电缆无线通讯舱体内设置有控制器、第一无线路由器、光端机和电源。
11.在其中一个实施例中,所述电缆无线通讯舱体的一端侧壁上开设有方形凹槽,所
述第一侧耳包括两个侧耳板和底板,两个所述侧耳板对称设置在所述底板上,所述底板焊接在所述方形凹槽内,两个所述侧耳板和杠杆上均开设有销孔,所述杠杆与两个所述侧耳板通过转动销轴可转动连接,所述转动销轴上插设有开口销。
12.在其中一个实施例中,所述机器人无线通讯舱包括机器人无线通讯舱体、第二左端盖和第二右端盖,所述第二左端盖和所述第二右端盖分别安装在所述机器人无线通讯舱体的左右两端,且所述第二左端盖和第二右端盖上均设置有第二密封圈,所述第二侧耳位于所述机器人无线通讯舱体上。
13.在其中一个实施例中,所述第二右端盖上设置有与水下机器人本体通信的电缆,所述机器人无线通讯舱体内设置有第二无线路由器,所述第一无线路由器和所述第二无线路由器采用无线通讯连接。
14.在其中一个实施例中,所述第一右端盖上开设有弹簧安装槽,所述第二左端盖上开设有弹簧限位槽,所述弹簧的一端安装在所述弹簧安装槽内,所述弹簧的另一端抵接在所述弹簧限位槽内。
15.在其中一个实施例中,所述第一右端盖上对向布置有两套相同且独立控制的自动脱离杠杆机构,所述机器人无线通讯舱体上对称设置有两个所述第二侧耳,两个所述u型挂钩分别勾在两个所述第二侧耳的卡位凹槽内,两个所述杠杆的外形均为半圆形,使得两套自动脱离杠杆机构不发生相互干涉,能够实现双重保险。
16.上述便于起吊的集装箱,由于采用上述技术,使之与现有技术相比具有的积极效果是:
17.本发明的水下机器人自动脱缆装置,可通过自动脱离杠杆机构实现电缆无线通讯舱和机器人无线通讯舱自动分离,使其在进入隧洞过程中能够通过有缆模式由岸上人员遥控操作,而在进入隧洞后能够脱缆切换为自主作业模式,具备作业范围广、抗流能力强、快速通信、快速脱离、水密性好的优势。
附图说明
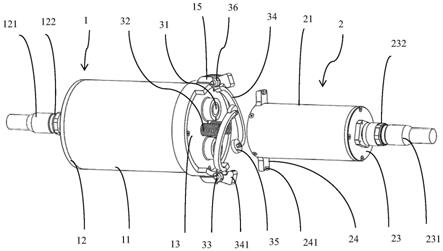
18.图1是本发明的有缆状态整体结构示意图;
19.图2是本发明的脱缆状态整体结构示意图;
20.图3是本发明的电缆无线通讯舱内部结构示意图;
21.图4是本发明的机器人无线通讯舱内部结构示意图。
22.附图标记:1、电缆无线通讯舱;11、电缆无线通讯舱体;12、第一左端盖;121、第一光纤插头;122、第一光纤插座;13、第一右端盖;14、第一密封圈;15、第一侧耳;16、控制器;17、第一无线路由器;18、光端机;19、电源;2、机器人无线通讯舱;21、机器人无线通讯舱体;22、第二左端盖;23、第二右端盖;231、第二光纤插头;232、第二光纤插座;24、第二侧耳;241、卡位凹槽;25、第二密封圈;26、第二无线路由器;3、自动脱离杠杆机构;31、失电型电磁铁;32、弹簧;33、转动销轴;34、杠杆;341、u型挂钩;35、铁块;36、滑动垫片。
具体实施方式
23.下面将结合本发明的附图和具体实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参阅图1至图4,本发明提供的一种实施例:水下机器人自动脱缆装置,包括电缆无线通讯舱1和机器人无线通讯舱2,电缆无线通讯舱1和机器人无线通讯舱2之间通过自动脱离杠杆机构3连接,机器人无线通讯舱2安装在水下机器人本体上,电缆无线通讯舱1的一端侧壁上设置有第一侧耳15,机器人无线通讯舱2的一端侧壁上设置有第二侧耳24,且第二侧耳24上开设有卡位凹槽241。
25.自动脱离杠杆机构3包括失电型电磁铁31、弹簧32、转动销轴33、杠杆34、铁块35,失电型电磁铁31和弹簧32均设置在电缆无线通讯舱1靠近第一侧耳15的一端面上,杠杆34的一端设置有u型挂钩341,且杠杆34的一端通过转动销轴33与第一侧耳15可转动连接,u型挂钩341与卡位凹槽241相配合连接,杠杆34能够绕着转动销轴33转动,杠杆34的另一端设置有与失电型电磁铁31配合的铁块35,失电型电磁铁31在不通电的情况下回吸住铁块35,弹簧32远离电缆无线通讯舱1的一端与机器人无线通讯舱2相抵接。
26.当电缆无线通讯舱1和机器人无线通讯舱2需要连接时,失电型电磁铁31不通电,使得失电型电磁铁31吸住铁块35,弹簧32处于压缩状态,u型挂钩341勾在卡位凹槽241内,通过杠杆34和u型挂钩341将电缆无线通讯舱1和机器人无线通讯舱2连接在一起,保证两个舱体之间的无线通讯。
27.当电缆无线通讯舱1和机器人无线通讯舱2需要脱离时,对失电型电磁铁31通电,器能够失去对铁块35的吸力,铁块35与失电型电磁铁31分离,在弹簧32的弹力下,机器人无线通讯舱2被弹开,杠杆34将会以转动销轴33为旋转中心转动,u型挂钩341从卡位凹槽241内脱离,从而实现电缆无线通讯舱1和机器人无线通讯舱2的分离,使得电缆与水下机器人脱离,达到自动脱缆的目的。
28.进一步,电缆无线通讯舱1包括电缆无线通讯舱体11、第一左端盖12和第一右端盖13,第一左端盖12和第一右端盖13分别安装在电缆无线通讯舱体11的左右两端,且第一左端盖12和第一右端盖13上均设置有第一密封圈14进行水密封处理,并用螺钉进行紧固。
29.还有,第一左端盖12上设置有电缆,电缆无线通讯舱体11内设置有控制器16、第一无线路由器17、光端机18和电源19,通过电缆分别连接岸上的工控机和控制器16,控制器16对电缆传输的通讯指令进行处理,并将工控机的指令通过光端机18和第一无线路由器17将有线通讯转换为无线通讯信号,整个转换过程由电源19进行供电,第一左端盖12上需要安装第一光纤插座122,并通过第一光纤插头121连接电缆。
30.进一步优化上述实施例,电缆无线通讯舱体11的一端侧壁上开设有方形凹槽,第一侧耳15包括两个侧耳板和底板,两个侧耳板对称设置在底板上,底板焊接在方形凹槽内,两个侧耳板和杠杆34上均开设有销孔,杠杆34与两个侧耳板通过转动销轴33可转动连接,转动销轴33上插设有开口销36,用开口销36限制转动销轴33在轴向上大幅度窜动,在杠杆34和两个侧耳板之间安装滑动垫片36,可以减轻转动时的相对摩擦。
31.进一步,机器人无线通讯舱2包括机器人无线通讯舱体21、第二左端盖22和第二右端盖23,第二左端盖22和第二右端盖23分别安装在机器人无线通讯舱体21的左右两端,且第二左端盖22和第二右端盖23上均设置有第二密封圈25进行水密封处理,第二侧耳24位于机器人无线通讯舱体21上。
32.第二右端盖23上设置有与水下机器人本体通信的电缆,第二右端盖23上需要安装第二光纤插座232,并通过第二光纤插头231将信号传递水下给机器人,机器人无线通讯舱体21内设置有第二无线路由器26,第一无线路由器17和第二无线路由器26采用无线通讯连接,用于接收第一无线路由器17发出的无线通讯指令,并将指令传递给机器人,实现岸上操作人员对水下机器人的精准控制。
33.第一右端盖13上开设有弹簧安装槽,第二左端盖22上开设有弹簧限位槽,弹簧32的一端安装在弹簧安装槽内,弹簧32的另一端抵接在弹簧限位槽内。
34.在本实施例中,第一右端盖13上对向布置有两套相同且独立控制的自动脱离杠杆机构3,且机器人无线通讯舱体21上对称设置有两个第二侧耳24,两个u型挂钩341分别勾在两个第二侧耳24的卡位凹槽241内,两个杠杆34的外形均为半圆形,以保证两套自动脱离杠杆机构3不发生相互干涉,两套相同且独立控制的自动脱离杠杆机构3能够实现双重保险。
35.在第一右端盖13上设有电磁铁安装槽和电磁铁排线槽,失电型电磁铁31通过灌胶的方式固定在电磁铁安装槽内,失电型电磁铁31的供电线安装在电磁铁排线槽内,并通过第一右端盖13上得贯通孔进入电缆无线通讯舱体11内,电磁铁排线槽和贯通孔内都通过灌胶填实进行密封。
36.本发明在水下机器人进入隧洞过程中能够通过有缆模式由岸上人员遥控操作,通过将电缆传输的有线信号转换为无线信号,并将无线信号传递给水下机器人,实现了对水下机器人的精确控制,而在水下机器人进入隧洞后可以利用自动脱离杠杆机构3,实现了两个舱体的自动分离,从而能够脱缆并切换为自主作业模式,具备作业范围广、抗流能力强、快速通信、快速脱离、水密性好等优势。
37.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
38.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1