一种防晕船实时自动同步调节数排座椅
1.本发明涉及防晕船座椅,特别涉及一种防晕船实时自动同步调节数排座椅。
背景技术:
2.人们在旅行或游玩过程中,时常有机会乘坐中小型船只或游艇在湖面及近海游玩观光,但是有部分人害怕晕船而望而却步,乘船游客有很多人会出现不同程度的晕船现象,不仅影响这些游客观光心情和效果,还影响晕船游客身体健康,使愉快的游玩行程可能因晕船而丧失快乐。
技术实现要素:
3.本发明的目的是提供一种防晕船实时自动同步调节数排座椅。
4.本发明是由数排座椅、数个t形座椅支撑、双自由度空间平行四杆混联机构、二个第一液压油缸、二个第二液压油缸、二个复合运动横梁装置、动态倾角传感器、四个支撑架、数个推拉杆、液压系统和闭环控制系统组成;所述的双自由度空间平行四杆混联机构是由数个可变长度摆杆组件、数个第一横梁、数个第二横梁、数个第一纵梁、数个第二纵梁、数个十字形连接件、球铰上座、数个横向推拉杆和数个纵向推拉杆组成,十字形连接件设有球铰下座;所述的可变长度摆杆组件是由球铰摆杆、滑键套和滑键组成;所述的复合运动横梁装置是由c型滚道横梁和四面滚珠横梁组件组成;所述的四面滚珠横梁组件是由二个具有数个半球环形滚道的横梁和数个滚珠组成;将数个滚珠置于一个具有数个半球环形滚道的横梁对应半球环形滚道内,另一个具有数个半球环形滚道的横梁上的数个半球环形滚道与对应滚珠对正,使二个具有数个半球环形滚道的横梁固连,组成四面滚珠横梁组件,四面滚珠横梁组件穿设于c型滚道横梁内,组成复合运动横梁装置;所述的液压系统主要由液压泵、二个o型三位四通电磁换向阀、二个双向数字调速阀、二个同步阀、二个第一液压油缸和二个第二液压油缸组成;所述的闭环控制系统主要由动态倾角传感器、单片机、二个位移传感器、a/d模块、执行电路和被控对象组成,被控对象有二个o型三位四通电磁换向阀和二个双向数字调速阀;将二个横向推拉杆和二个纵向推拉杆的一端分别与滑键对称球铰连接,二个横向推拉杆和二个纵向推拉杆的另一端分别与对应的滑键球铰连接,参照本段前述组装步骤,直至所有横向推拉杆和纵向推拉杆的二端都与对应的滑键球铰连接,数个推拉杆一端分别与对应的滑键球铰连接,数个推拉杆另一端分别与二个具有数个半球环形滚道的横梁固连;二个第一液压油缸缸体分别固连于二个支撑架上面,使二个第一液压油缸活塞杆分别伸出最大行程一半,二个第一液压油缸活塞杆对称固连于c型滚道横梁上,二个第二液压油
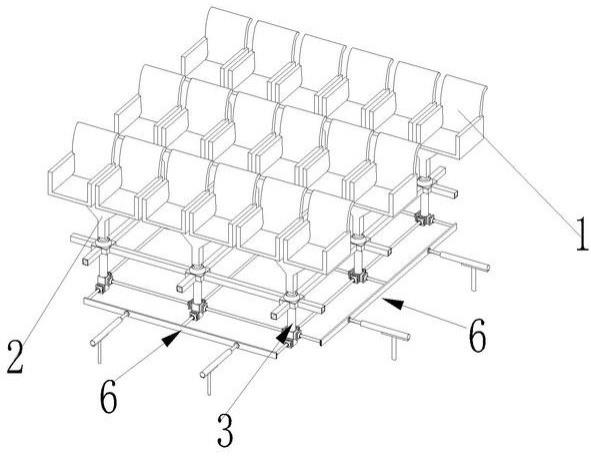
缸缸体分别固连于另外二个支撑架上面,使二个第二液压油缸活塞杆分别伸出最大行程一半,二个第二液压油缸活塞杆对称固连于另一个c型滚道横梁上,四个支撑架下面分别与船体龙骨固连,组成图6所示结构;将二个第一横梁和二个第一纵梁的一端分别与十字形连接件固连,球铰摆杆穿设于十字形连接件球铰下座中,球铰上座套设于球铰摆杆上,使球铰上座与十字形连接件固连,球铰摆杆与十字形连接件形成球铰连接,滑键套套设于球铰摆杆下端固连,二个第一横梁和二个第一纵梁的另一端分别与对应的十字形连接件固连,参照本段前述组装步骤,直至所有十字形连接件、第一横梁、第一纵梁、球铰摆杆、球铰上座和滑键套组装完成,再将数个第二横梁和数个第二纵梁分别与对应十字形连接件固连,组成图7所示结构;将图7中数个滑键套对正套设于图6中对应的滑键上,数个第二横梁和数个第二纵梁分别与船体对应龙骨固连,动态倾角传感器固连于第一横梁下面,组成图2所示双自由度空间平行四杆混联机构,数个t形座椅支撑分别套设于球铰摆杆上端固连,数个座椅分别固连于t形座椅支撑上,组成防晕船实时自动同步调节数排座椅。
5.本发明的有益效果是:本发明应用动态倾角传感器采集船体实时晃动纵横倾角信号,采用闭环控制系统,控制第一液压油缸活塞杆和第二液压油缸活塞杆协调运动,分别使二个复合运动横梁装置中的二个具有数个半球环形滚道的横梁托带数个推拉杆推(或拉)动空间平行四杆混联机构运动,数排座椅与船体晃动纵横倾角反向实时同步摆动,使数排座椅摆动至计算水平状态,确保乘客们基本不摇晃,实现有效避免乘客们晕船。
附图说明
6.图1是本发明之船体甲板水平状态数排座椅立体示意图。
7.图2是本发明之双自由度空间平行四杆混联机构立体示意图。
8.图3是本发明之船体发生晃动纵横倾角时数排座椅(无座椅和t形座椅支撑)调节水平状态立体示意图。
9.图4是图3中a处局部放大立体示意图。
10.图5是本发明之t形座椅支撑和可变长度摆杆组件等分解立体示意图。
11.图6是图2无纵梁、横梁和球铰摆杆等立体示意图。
12.图7是图2无纵向推拉杆、横向推拉杆和滑键等立体示意图。
13.图8是本发明之控制原理示意图。
具体实施方式
14.请参阅图1、图2、图5和图6所示,本发明是由数排座椅1、数个t形座椅支撑2、双自由度空间平行四杆混联机构3、二个第一液压油缸4、二个第二液压油缸5、二个复合运动横梁装置6、动态倾角传感器7、四个支撑架8、数个推拉杆9、液压系统和闭环控制系统组成;请参阅图1至图3、图5至图7所示,所述的双自由度空间平行四杆混联机构3是由数个可变长度摆杆组件30、数个第一横梁31、数个第二横梁32、数个第一纵梁33、数个第二纵梁34、数个十字形连接件35、球铰上座36、数个横向推拉杆37和数个纵向推拉杆38组成,十字形连接件35设有球铰下座350;
请参阅图2和图5所示,所述的可变长度摆杆组件30是由球铰摆杆300、滑键套301和滑键302组成;请参阅图3所示,所述的复合运动横梁装置6是由c型滚道横梁60和四面滚珠横梁组件61组成;请参阅图3和图4所示,所述的四面滚珠横梁组件61是由二个具有数个半球环形滚道的横梁610和数个滚珠611组成;将数个滚珠611置于一个具有数个半球环形滚道的横梁610对应半球环形滚道内,另一个具有数个半球环形滚道的横梁610上的数个半球环形滚道与对应滚珠611对正,使二个具有数个半球环形滚道的横梁610固连,组成四面滚珠横梁组件61,四面滚珠横梁组件61穿设于c型滚道横梁60内,组成复合运动横梁装置6;所述的液压系统主要由液压泵、二个o型三位四通电磁换向阀、二个双向数字调速阀、二个同步阀、二个第一液压油缸4和二个第二液压油缸5组成;请参阅图8所示,所述的闭环控制系统主要由动态倾角传感器7、单片机、二个位移传感器、a/d模块、执行电路和被控对象组成,被控对象有二个o型三位四通电磁换向阀和二个双向数字调速阀;将二个横向推拉杆37和二个纵向推拉杆38的一端分别与滑键302对称球铰连接,二个横向推拉杆37和二个纵向推拉杆38的另一端分别与对应的滑键302球铰连接,参照本段前述组装步骤,直至所有横向推拉杆37和纵向推拉杆38的二端都与对应的滑键302球铰连接,数个推拉杆9一端分别与对应的滑键302球铰连接,数个推拉杆9另一端分别与二个具有数个半球环形滚道的横梁610固连;二个第一液压油缸4缸体分别固连于二个支撑架8上面,使二个第一液压油缸4活塞杆分别伸出最大行程一半,二个第一液压油缸4活塞杆对称固连于c型滚道横梁60上,二个第二液压油缸5缸体分别固连于另外二个支撑架8上面,使二个第二液压油缸5活塞杆分别伸出最大行程一半,二个第二液压油缸5活塞杆对称固连于另一个c型滚道横梁60上,四个支撑架8下面分别与船体龙骨固连,组成图6所示结构;将二个第一横梁31和二个第一纵梁32的一端分别与十字形连接件35固连,球铰摆杆300穿设于十字形连接件球铰下座351中,球铰上座36套设于球铰摆杆300上,使球铰上座36与十字形连接件35固连,球铰摆杆300与十字形连接件35形成球铰连接,滑键套301套设于球铰摆杆300下端固连,二个第一横梁31和二个第一纵梁32的另一端分别与对应的十字形连接件35固连,参照本段前述组装步骤,直至所有十字形连接件35、第一横梁31、第一纵梁32、球铰摆杆300、球铰上座36和滑键套301组装完成,再将数个第二横梁32和数个第二纵梁34分别与对应十字形连接件35固连,组成图7所示结构;将图7中数个滑键套301对正套设于图6中对应的滑键302上,数个第二横梁32和数个第二纵梁34分别与船体对应龙骨固连,动态倾角传感器7固连于第一横梁31下面,组成图2所示双自由度空间平行四杆混联机构3,数个t形座椅支撑2分别套设于球铰摆杆30上端固连,数个座椅1分别固连于t形座椅支撑2上,组成防晕船实时自动同步调节数排座椅。
15.本实施例的工作过程和原理如下:二个第一液压油缸活塞杆伸出或缩回同步由同步阀控制,二个第二液压油缸活塞杆伸出或缩回同步由另一个同步阀控制,单片机内置o型三位四通电磁换向阀的换向控制程序和双向数字调速阀的流量控制程序;在单片机程序初始化时,设置第一液压油缸活塞
杆和第二液压油缸活塞杆初始行程为零,并通过串口命令输入动态倾角传感器纵横倾角的相对零点,船只航行时动态倾角传感器实时测量船体纵横倾角(θ
x
,θ
y
)信号输入单片机,单片机分别给出第一液压油缸活塞杆和第二液压油缸活塞杆计算行程(l1,l2)信号;单片机内置算法给出第一液压油缸活塞杆和第二液压油缸活塞杆计算行程(l1,l2)信号,再分别给出二个o型三位四通电磁换向阀的换向控制信号、二个调速阀的流量调控信号,分别驱动二个o型三位四通电磁换向阀换向、二个双向数字调速阀流量调整,使第一液压油缸活塞杆和第二液压油缸活塞杆协调运动,第一液压油缸活塞杆和第二液压油缸活塞杆分别推(或拉)复合运动横梁装置运动,二个具有数个半球环形滚道的横梁分别托带数个推拉杆复合运动,数个推拉杆推(或拉)动空间平行四杆混联机构运动,使数排座椅与船体晃动纵横倾角(θ
x
,θ
y
)反向实时同步摆动,二个位移传感器分别将第一液压油缸活塞杆和第二液压油缸活塞杆伸出(或缩回)实际行程(s1,s2)送入单片机,单片机分别给出船体纵横倾角(
x
, y
)信号与动态倾角传感器实时测量船体纵横倾角(θ
x
,θ
y
)信号相比较,得到误差值,经数字pid算法后,单片机驱动控制二个o型三位四通电磁换向阀换向和二个数字调速阀流量调节,实现第一液压油缸和第一液压油缸的运动速度控制;上述过程在一个控制周期内完成,并根据船只航行中船体实时纵横倾角(θ
x
,θ
y
)动态往复执行,使数排座椅实时同步摆动至图3所示计算水平状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1