移动式智能船舶充电装置
1.本发明涉及充电装置技术领域,更具体地说,是一种移动式智能船舶充电装置。
背景技术:
2.船舶是水上交通运输和水上作业的主要工具,伴随着社会的发展以及科学 的进步,船舶的数目及种类越来越多,在运输业中也起着越来越重要的作用。
3.智能船舶在行驶过程中,经常容易出现电量不足的情况,此时需要采用移动式的充电装置来对智能船舶进行充电工作,但是现有的移动式充电装置存在一系列的缺陷;传统的智能船舶充电装置的充电插头在拔出的瞬间,如果工作人员直接释放,会导致充电插头落入水中造成漏电的现象,而且现有的充电装置上自带的船锚的沉降工作完全采用人工操作,工作人员无法得知船锚的沉降状态,导致充电装置的固定效果较差。
技术实现要素:
4.本发明的目的在于提供一种移动式智能船舶充电装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种移动式智能船舶充电装置,包括屋体、漂浮座、若干个浮球以及螺旋桨,所述屋体、若干个所述浮球以及螺旋桨均设置在所述漂浮座上,还包括:底板,数量至少为一个,所述底板活动设置在所述漂浮座上;充电系统,设置在所述屋体上,所述充电系统包括充电头模块、收卷盘以及储能电源,所述充电头模块和所述储能电源之间通过导线连接,所述导线绕卷在所述收卷盘上,所述收卷盘通过转轴铰接在所述屋体上且两者之间设有复位所述收卷盘的复位件;以及停泊定位系统,数量至少为一个,所述停泊定位系统设置在所述漂浮座上,用于固定所述漂浮座在水面上的位置;其中所述停泊定位系统至少包括船锚模块和驱动模块,所述船锚模块以及所述底板和所述驱动模块均连接,所述驱动模块可调节所述船锚模块以及所述底板相对所述漂浮座的位置。
6.本技术更进一步的技术方案:所述充电头模块包括:安装座,设置在所述屋体上,所述收卷盘设置在所述安装座内,所述安装座内设有供所述导线穿过的通道;插头,通过所述导线和所述储能电源连通;触发单元,设置在所述插头上,用于监控所述插头的使用状态;以及锁止单元,设置在所述安装座内,用于固定所述插头的位置,所述锁止单元和所述触发单元电性连接。
7.本技术更进一步的技术方案:所述触发单元的数量至少为一组,每组所述触发单元包括触发杆以及一组触点;
所述触发杆活动设置在所述插头上且两者弹性连接,一组所述触点设置在所述触发杆和所述插头之间。
8.本技术更进一步的技术方案:所述锁止单元包括限位头以及驱动件;所述限位头活动设置在所述安装座内,所述驱动件设置在所述限位头和所述安装座之间,所述驱动件可控制所述限位头运动,所述导线上设有若干个与所述限位头相配合的限位凸起。
9.本技术又进一步的技术方案:所述驱动模块包括卷绕盘、螺纹杆以及动力源;所述卷绕盘活动设置在所述漂浮座上,所述卷绕盘上卷绕有软性件,所述软性件与所述船锚模块连接,所述螺纹杆也活动设置在所述漂浮座内,所述螺纹杆与所述底板螺纹配合,所述螺纹杆和所述卷绕盘之间设置有用于连接两者的装配连接件。
10.本技术又进一步的技术方案:所述装配连接件包括卡槽和卡块;所述卡块通过转轴铰接在所述卷绕盘上且铰接处设有扭簧,所述卡槽设置在所述螺纹杆上且与所述卡块相配合。
11.本技术又进一步的技术方案:所述船锚模块包括锚体、连接座以及监控模块;所述锚体和所述连接座活动连接,所述连接座和所述软性件连接,所述监控模块设置在所述锚体和所述连接座之间,用于监控所述锚体的沉降进度。
12.本技术再进一步的技术方案:所述监控模块包括监控座、第一电极片、第二电极片以及连接杆;所述监控座活动设置在所述锚体上且两者弹性连接,所述第一电极片设置在所述锚体上,所述第二电极片设置在所述监控座内,所述第一电极片位于所述第二电极片的移动路径上,所述监控座通过所述连接杆和所述连接座活动连接。
13.采用本发明实施例提供的技术方案,与现有技术相比,具有如下有益效果:1、本发明实施例通过设置触发单元实时监控插头和船舶的配合状态,当插头顺利插入船舶对其进行充电工作时,触发锁止单元自动固定插头的位置,避免人体脱离插头时,在复位件的作用下,使得插头复位,并且在拔出插头时,锁止单元失效,复位件顺利控制插头复位,避免插头在自身的重力作用下掉落水中造成漏电,安全系数较高而且节省人力。
14.2、本发明实施例通过设置监控模块实时监控锚体的沉降状态,当锚体顺利触及水底时,监控模块自动控制步进电机的停止工作,从而顺利实现对整个装置的固定工作,自动化程度高,而且固定效果好。
附图说明
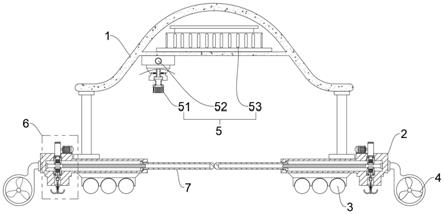
15.图1为本发明实施例中移动式智能船舶充电装置的结构示意图;图2为本发明实施例中移动式智能船舶充电装置中充电系统的结构示意图;图3为本发明实施例中移动式智能船舶充电装置中停泊定位系统的结构示意图;图4为本发明实施例中移动式智能船舶充电装置中图3中a处放大的结构示意图;图5为本发明实施例中移动式智能船舶充电装置中卷绕盘和卡块的结构示意图。
16.示意图中的标号说明:1
‑
屋体、2
‑
漂浮座、3
‑
浮球、4
‑
螺旋桨、5
‑
充电系统、51
‑
充电头模块、511
‑
安装座、512
‑
插头、513
‑
触发杆、514
‑
触点、515
‑
限位凸起、516
‑
限位头、517
‑
电磁铁、52
‑
收卷盘、53
‑
储能电源、6
‑
停泊定位系统、61
‑
步进电机、62
‑
齿轮、63
‑
卷绕盘、64
‑
螺纹杆、65
‑
齿部、66
‑
船锚模块、661
‑
锚体、662
‑
监控座、663
‑
第一电极片、664
‑
第二电极片、665
‑
连接座、666
‑
连接杆、67
‑
卡槽、68
‑
卡块、7
‑
底板。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围,下面结合实施例对本发明作进一步的描述。
18.请参阅图1
‑
5,本技术的一个实施例中,一种移动式智能船舶充电装置,包括屋体1、漂浮座2、若干个浮球3以及螺旋桨4,所述屋体1、若干个所述浮球3以及螺旋桨4均设置在所述漂浮座2上,还包括:底板7,数量至少为一个,所述底板7活动设置在所述漂浮座2上;充电系统5,设置在所述屋体1上,所述充电系统5包括充电头模块51、收卷盘52以及储能电源53,所述充电头模块51和所述储能电源53之间通过导线连接,所述导线绕卷在所述收卷盘52上,所述收卷盘52通过转轴铰接在所述屋体1上且两者之间设有复位所述收卷盘52的复位件;以及停泊定位系统6,数量至少为一个,所述停泊定位系统6设置在所述漂浮座2上,用于固定所述漂浮座2在水面上的位置;其中所述停泊定位系统6至少包括船锚模块66和驱动模块,所述船锚模块66以及所述底板7和所述驱动模块均连接,所述驱动模块可调节所述船锚模块66以及所述底板7相对所述漂浮座2的位置。
19.需要具体说明的是,所述复位件可以为扭簧或者发条,只要能够实现对所述收卷盘52的复位工作即可,在此不做具体限定,另外,在本技术中,所述停泊定位系统6和所述底板7的数量均为两组且对称设置在所述漂浮座2上。
20.在实际应用时,通过螺旋桨4的作用带动整个装置移动到船舶的所在位置,通过驱动模块工作,带动底板7如图1所示方向朝两侧移动供船舶进入屋体1内,在此同时,驱动模块还控制漂浮座2沉降进入水底从而对漂浮座2的位置进行固定,避免大浪天气造成整个装置发生偏移,在对船舶进行充电工作时,通过外拉充电头模块51,使得收卷盘52上的导线被释放,从而实现将储能电源53内的电能充入船舶内,实现了充电的工作,充电完成时,通过复位件对收卷盘52以及充电头模块51进行复位工作。
21.请参阅图1和图2,作为本技术一个优选的实施例,所述充电头模块51包括:安装座511,设置在所述屋体1上,所述收卷盘52设置在所述安装座511内,所述安装座511内设有供所述导线穿过的通道;插头512,通过所述导线和所述储能电源53连通;触发单元,设置在所述插头512上,用于监控所述插头512的使用状态;以及锁止单元,设置在所述安装座511内,用于固定所述插头512的位置,所述锁止单元和所述触发单元电性连接。
22.在本实施例的一个具体情况中,所述触发单元的数量至少为一组,每组所述触发
单元包括触发杆513以及一组触点514;所述触发杆513活动设置在所述插头512上且两者弹性连接,一组所述触点514设置在所述触发杆513和所述插头512之间。
23.当然,本实施例中并非局限于上述一组触点514来触发锁止单元工作,还可以采用在触发杆513和插头512之间设置红外线测距传感器/激光测距传感器等等,在此不做具体限定。
24.在本实施例的另一个具体情况中,所述锁止单元包括限位头516以及驱动件;所述限位头516活动设置在所述安装座511内,所述驱动件设置在所述限位头516和所述安装座511之间,所述驱动件可控制所述限位头516运动,所述导线上设有若干个与所述限位头516相配合的限位凸起515。
25.需要具体说明的是,所述驱动件可以为电缸、线性电机或者气缸等等元件,在本示例中,所述驱动件优选为一组通电相斥的电磁铁517,一组所述电磁铁517设置在所述限位头516和所述安装座511之间。
26.在船舶驶入屋体1下时,外拉插头512,使得收卷盘52转动释放导线,当插头512插入船舶上设置在插头512内时,使得触发杆513相对插头512移动,直到触点514之间接触,触发一组电磁铁517之间通电相斥,带动限位头516朝导线的位置移动,直到限位头516插在相邻的限位凸起515之间,从而对插电状态的插头512的位置进行固定,避免人手脱离插头512时,插头512在复位件的作用下复位,并且,当充电工作完成时,插头512拔出时,触发杆513在弹性恢复力的作用下复位,从而使得触点514之间脱离,此时电磁铁517断电,限位头516脱离限位凸起515,在复位件的作用下,插头512自动复位,从而避免工作人员在拔出插头512时,插头512在自身重力作用下掉落到水中产生漏电现象,安全系数较高且方便。
27.请参阅图1、图3、图4和图5,作为本技术另一个优选的实施例,所述驱动模块包括卷绕盘63、螺纹杆64以及动力源;所述卷绕盘63活动设置在所述漂浮座2上,所述卷绕盘63上卷绕有软性件,所述软性件与所述船锚模块66连接,所述螺纹杆64也活动设置在所述漂浮座2内,所述螺纹杆64与所述底板7螺纹配合,所述螺纹杆64和所述卷绕盘63之间设置有用于连接两者的装配连接件。
28.在本实施例中示例性的,所述动力源包括电机和齿轮62,所述电机设置在所述漂浮座2上且其输出端与所述齿轮62连接,所述卷绕盘63上环布有若干个与所述齿轮62相啮合的齿部65,当然,所述电机可以采用步进电机61或者伺服电机,在本实施例中,所述电机优选为步进电机61,至于步进电机61的具体型号可以根据实际情况作出相应的选择,在此不做具体限定。
29.另外,所述软性件可以为绳索、橡胶带或者钢绳等等,在此不做具体限定。
30.在本实施例的一个具体情况中,所述装配连接件包括卡槽67和卡块68;所述卡块68通过转轴铰接在所述卷绕盘63上且铰接处设有扭簧,所述卡槽67设置在所述螺纹杆64上且与所述卡块68相配合。
31.在通过螺旋桨4带动整个装置移动到船舶的所在位置时,通过步进电机61转动,带动齿轮62转动,在齿轮62和齿部65的啮合作用下,卷绕盘63转动释放船锚模块66沉降,同时通过卡块68和卡槽67之间的配合作用下,带动螺纹杆64转动,使得底板7朝漂浮座2的外侧
移动,从而使得屋体1打开,方便船舶进入屋体1,当底板7的位置达到极限时,此时步进电机61持续转动,在扭力的作用下,使得卡块68脱离卡槽67从而使得卷绕盘63单独转动释放软性件,直到船锚模块66到达水底,步进电机61停止工作,整个装置的固定工作完成。
32.请参阅图4和图5,作为本技术另一个优选的实施例,所述船锚模块66包括锚体661、连接座665以及监控模块;所述锚体661和所述连接座665活动连接,所述连接座665和所述软性件连接,所述监控模块设置在所述锚体661和所述连接座665之间,用于监控所述锚体661的沉降进度。
33.在本实施例的一个具体情况中,所述监控模块包括监控座662、第一电极片663、第二电极片664以及连接杆666;所述监控座662活动设置在所述锚体661上且两者弹性连接,所述第一电极片663设置在所述锚体661上,所述第二电极片664设置在所述监控座662内,所述第一电极片663位于所述第二电极片664的移动路径上,所述监控座662通过所述连接杆666和所述连接座665活动连接。
34.需要具体特别说明的是,所述监控模块并非局限于第一电极片663和第二电极片664之间的配合方式,还可以采用在监控座662和锚体661之间设置红外线测距传感器/激光测距传感器等等,在此不做具体限定。
35.在实际应用时,当船锚本体释放之前,在锚体661的自身重力作用下,监控座662处于如图4所示的上极限位置,在卷绕盘63转动释放软性件时,锚体661自由下沉,直到锚体661接触到水底时,此时软性件变得松弛,在监控座662和锚体661之间的弹性恢复力的作用下,监控座662带动第二电极片664下移,使得第一电极片663和第二电极片664之间接触,触发步进电机61停止工作,从而完成对整个装置的固定工作。
36.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1