一种双功能深潜器推进系统
1.本发明涉及推进器的技术领域,特别涉及一种双功能深潜器推进系统。
背景技术:
2.深海水下滑翔机aug(autonomous underwater glider)可以无动力大范围长时间水下滑翔测试;自主无人潜水器auv(autonomous underwater vehicle)需要自身动力驱动下进行快速自主航行作业。将两种潜水器合体集成,充分发挥两者的技术特点与优势,在水下目标信号探测与具体水域精细搜索领域有广泛应用前景。其中关键是如何进行aug与auv状态自主切换,这是一项重要技术问题。
技术实现要素:
3.针对现有技术中存在的不足之处,本发明的目的是提供一种双功能深潜器推进系统,能够实现aug与auv状态自主切换,解决双功能潜航器的低阻滑翔、高效推进系统适配问题。为了实现根据本发明的上述目的和其他优点,提供了一种双功能深潜器推进系统,包括:
4.舵机固定架、固定于所述舵机固定架上的驱动组件、与所述驱动组件活动连接的曲柄结构、与所述曲柄结构活动连接的推进器及活动连接于所述推进器上的导流罩;
5.所述驱动组件包括驱动电机及与所述驱动电机的输出轴固接的舵轴,所述舵轴活动设置于舵机固定架上;
6.曲柄结构的一端与舵轴活动连接,另一端活动连接有旋转轴,所述旋转轴的两端固接有旋转固定座,所述旋转固定座固定于推进器上。
7.优选的,所述推进器远离舵机固定架的一端上固接有推进器导向架,且所述推进器导向架与舵机固定架之间固接有第一导向杆与第二导向杆,且所述第一导向杆与第二导向杆相对设置于推进器的两侧。
8.优选的,所述推进器的两侧边分别相对固接有第一固定座,所述第一固定座中分别贯穿有第一导向杆与第二导向杆。
9.优选的,所述第一固定座上活动连接有连接杆,所述连接杆上活动连接有导流罩。
10.优选的,所述导流罩为一弧形状,且导流罩靠近推进器处开设有一多边形弧形槽,所述弧形槽用于避让推进器。
11.优选的,所述舵机固定架一侧面上固定有电磁铁座,所述电磁铁座上固接有电磁体。
12.本发明与现有技术相比,其有益效果是:
13.(1)在驱动组件中的驱动电机的输出轴带动曲柄结构转动,使推进器沿第一导向杆与第二导向杆长度方向移动,导流罩通过连接杆与推进器相连,实现导流罩的开合动作。
14.(2)当推进器伸出最大位置时,曲柄结构与电磁体贴合并被吸住,从而实现推进器轴向位置的固定。
15.(3)当电磁体通电后,曲柄结构在驱动组件的驱动下沿第一导向杆与第二导向杆回收,完成深潜器推进单元的伸展\回收以及导流罩的开启与闭合,实现水下航行的低阻滑翔与高效推进,驱动组件能够为推进器伸出起始时提供足够的推力。采用磁耦合传动的电机驱动方式。与传统的磁耦合传动方式相比,拟通过改进结构设计,将滑动轴承全部转换为滚动轴承,从而降低摩擦系数以提高传动效率。
附图说明
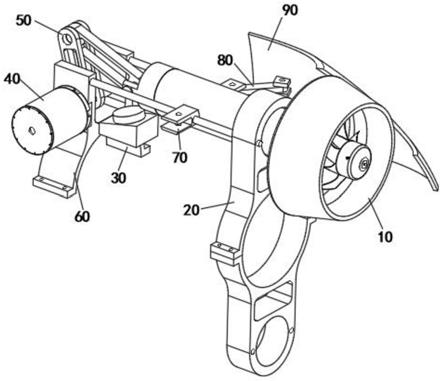
16.图1为根据本发明的双功能深潜器推进系统的结构示意图;
17.图2为根据本发明的双功能深潜器推进系统的控喷枪枪把剖视图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.参照图1
‑
2,一种双功能深潜器推进系统,包括:舵机固定架60、固定于所述舵机固定架60上的驱动组件40、与所述驱动组件40活动连接的曲柄结构50、与所述曲柄结构50活动连接的推进器10及活动连接于所述推进器10上的导流罩90,在使用时在深潜器上安装两个该推进器10,分别独立执行机构驱动完成推进器10伸缩及导流罩90的开合动作;所述驱动组件40包括驱动电机41及与所述驱动电机41的输出轴固接的舵轴41,所述驱动电机41为谐波减速器,采用步进电机作为动力源,经谐波减速器减速后实现舵轴的旋转运动。为实现伺服操纵单元的高精度位置控制,在输出轴上安装空心式旋转变压器,实现输出轴角度的实时反馈,通过驱动电机41的输出轴转动带动舵轴41旋转运动,且驱动电机41的输出轴上安装有空心式旋转变压器,使得驱动电机41输出轴角度的实时反馈,驱动组件40中通过o形圈进行动密封,实现水密伺服操纵单元小型化,通过集中活塞式油压补偿机构对驱动组件40内部进行压力补偿,满足大深度下的耐压要求。压力补偿机构与水下舵机系统间通过管路相连,所述舵轴41活动设置于舵机固定架60上;曲柄结构50的一端与舵轴41活动连接,另一端活动连接有旋转轴100,所述旋转轴100的两端固接有旋转固定座130,所述旋转固定座130固定于推进器10上,驱动组件40带动曲柄结构50进行转动,使得推进器10沿第一导向杆110与第二导向杆120长度方向移动,进而带动导流罩90的开合动作;所述舵机固定架60一侧面上固定有电磁铁座30,所述电磁铁座30上固接有电磁体,当推进器10完全伸展到最大位置时,此时曲柄结构50向电磁体靠近,且曲柄结构50被电磁体吸住,从而实现推进器10保持最大的位置的固定,当推进器10完全伸展到最大位置时,将电磁体通电,此时驱动组件40带动曲柄结构50转动,进而使得导流罩90向电磁体方向移动,使得导流罩90闭合。
20.进一步的,所述推进器10远离舵机固定架60的一端上固接有推进器导向架20,且所述推进器导向架20与舵机固定架60之间固接有第一导向杆110与第二导向杆120,且所述第一导向杆110与第二导向杆120相对设置于推进器10的两侧。
21.进一步的,所述推进器10的两侧边分别相对固接有第一固定座70,所述第一固定座70中分别贯穿有第一导向杆110与第二导向杆120。
22.进一步的,所述第一固定座70上活动连接有连接杆80,所述连接杆80上活动连接有导流罩90。
23.进一步的在于,所述导流罩90为一弧形状,且导流罩90靠近推进器10处开设有一多边形弧形槽,所述弧形槽用于避让推进器10。
24.这里说明的设备数量和处理规模是用来简化本发明的说明的,对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
25.尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
技术特征:
1.一种双功能深潜器推进系统,其特征在于,包括:舵机固定架(60)、固定于所述舵机固定架(60)上的驱动组件(40)、与所述驱动组件(40)活动连接的曲柄结构(50)、与所述曲柄结构(50)活动连接的推进器(10)及活动连接于所述推进器(10)上的导流罩(90);所述驱动组件(40)包括驱动电机(41)及与所述驱动电机(41)的输出轴固接的舵轴(41),所述舵轴(41)活动设置于舵机固定架(60)上;曲柄结构(50)的一端与舵轴(41)活动连接,另一端活动连接有旋转轴(100),所述旋转轴(100)的两端固接有旋转固定座(130),所述旋转固定座(130)固定于推进器(10)上。2.如权利要求1所述的一种双功能深潜器推进系统,其特征在于,所述推进器(10)远离舵机固定架(60)的一端上固接有推进器导向架(20),且所述推进器导向架(20)与舵机固定架(60)之间固接有第一导向杆(110)与第二导向杆(120),且所述第一导向杆(110)与第二导向杆(120)相对设置于推进器(10)的两侧。3.如权利要求1所述的一种双功能深潜器推进系统,其特征在于,所述推进器(10)的两侧边分别相对固接有第一固定座(70),所述第一固定座(70)中分别贯穿有第一导向杆(110)与第二导向杆(120)。4.如权利要求3所述的一种双功能深潜器推进系统,其特征在于,所述第一固定座(70)上活动连接有连接杆(80),所述连接杆(80)上活动连接有导流罩(90)。5.如权利要求4所述的一种双功能深潜器推进系统,其特征在于,所述导流罩(90)为一弧形状,且导流罩(90)靠近推进器(10)处开设有一多边形弧形槽,所述弧形槽用于避让推进器(10)。6.如权利要求1所述的一种双功能深潜器推进系统,其特征在于,所述舵机固定架(60)一侧面上固定有电磁铁座(30),所述电磁铁座(30)上固接有电磁体。
技术总结
本发明公开了一种双功能深潜器推进系统,包括:舵机固定架、固定于所述舵机固定架上的驱动组件、与所述驱动组件活动连接的曲柄结构、与所述曲柄结构活动连接的推进器及活动连接于所述推进器上的导流罩;所述驱动组件包括驱动电机及与所述驱动电机的输出轴固接的舵轴,所述舵轴活动设置于舵机固定架上;曲柄结构的一端与舵轴活动连接,另一端活动连接有旋转轴,所述旋转轴的两端固接有旋转固定座,所述旋转固定座固定于推进器上。根据本发明,能够实现AUG与AUV状态自主切换,解决双功能潜航器的低阻滑翔、高效推进系统适配问题。高效推进系统适配问题。高效推进系统适配问题。
技术研发人员:朱大奇 褚振忠 陈琦 张文
受保护的技术使用者:上海理工大学
技术研发日:2021.08.12
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1