一种基于海陆约束的船舶预测轨迹修正方法与流程
1.本发明属于海上运动目标动向预测技术领域,特别是指一种基于海陆约束的船舶预测轨迹修正方法。
背景技术:
2.轨迹预测是船舶行为规律及动向预测分析问题中的重要内容。在当前对船舶航迹的预测方法主要分为两类:一类是借助历史上大量船舶的航行记录,通过航迹时空聚类、模式提取等方式,总结船舶在各个典型时空条件下的典型航迹,以此为依据预测当前船只的未来航迹;另一类是通过提取航迹空间特征、时间特征、船舶运动特征等,在不借助历史数据的情况下,借助机器学习或深度学习方法,完全从当前航迹数据出发实现船舶航迹预测。
3.上述两种方法在算法设计过程中均未充分考虑海陆约束(即海岸线)。第一类方法采用“模仿”历史航迹的方式,隐性的利用历史航迹中的海陆关系信息;第二种方法则几乎未将海陆关系考虑在内,然而海岸线作为海上船舶航行的强物理约束,直接影响预测结果的正确性。因此,在未进行修正的情况下,可能会出现航迹预测结果出现在陆地上的情况。所以,上述方法目前大多适用于开阔海域或短时预测等海陆关系影响程度较低情况下的航迹预测问题,而在河道、岛屿附近往往难以取得较好的预测效果。
技术实现要素:
4.本发明的目的在于克服当前各类船舶航迹预测算法中未充分考虑海陆约束,导致部分预测结果出现在陆地上的问题,提出一种基于海陆约束的船舶预测轨迹修正方法,该方法基于差异化海岸线缓冲区对预测航迹进行修正,其在分析典型关系模式的基础上,制定了不同模式下的航迹修正策略,是对现有各类船舶航迹预测方法的有效补充。
5.本发明的目的是这样实现的:
6.一种基于海陆约束的船舶预测轨迹修正方法,包括以下步骤:
7.(1)生成差异化陆地缓冲区;
8.(2)判断船舶预测航迹与缓冲区的关系模式,针对每种关系模式分别对船舶预测航迹进行修正。
9.进一步的,步骤(1)的具体方式为:通过gis缓冲区生成方法,以全球海岸线为依据,分别针对船舶在开阔海域、海峡、群岛、内河环境下的可通行区域,制定差异化陆地缓冲区生成策略,并融合形成统一的全球船舶航行区域mp;
10.其中,mp是由σ个多边形组成的multipolygon矢量对象multipolygon(p1,p2,...,p
σ
),每个多边形对象p
i
为由π个地理坐标点首尾依次连接所围城的闭合矢量面。
11.进一步的,步骤(2)具体包括以下步骤:
12.(201)假设船舶预测航迹为l=(p1,p2,...p
m
),p
i
处的经度、纬度分别为x
i
,y
i
;获取与l有交集的mp中的第一个多边形p
θ
,然后转至步骤(202),若l与mp无交集,则表示未出现轨迹上陆情况,无需进行航迹修正;
13.(202)根据l与p
θ
的边的交点数量,区分不同模式如下:
14.模式0,l与p
θ
的边无交点;
15.模式1,l与p
θ
的边有一个交点,且l的起点p1包含在p
θ
区域内;
16.模式2,l与p
θ
的边有一个交点,且l的起点p1不包含在p
θ
区域内;
17.模式3,l与p
θ
的边有两个交点;
18.模式
‑
1,l与p
θ
的边有至少3个交点;
19.(203)针对不同模式,分别进行航迹修正如下:
20.模式0的航迹修正:在模式0下,预测船舶在进入缓冲区范围后继续向前运动,此情况下判定船舶将发生靠岸行为,船舶在航迹与海岸线相交处停止前行,航迹在该处截断;
21.模式1的航迹修正:在模式1下,预测船舶在缓冲区内自内向外穿出,此情况下判定船舶将发生离港行为,船舶将穿出缓冲区后继续前行,缓冲区内航迹段保持不变,缓冲区外航迹段作为新的l送入步骤(201)进行递归处理;
22.模式2的航迹修正:在模式2下,预测船舶在缓冲区外由外向内进入缓冲区,此情况下判定船舶将沿着缓冲区边缘航行,船舶在抵达缓冲区边缘后,依据方向优先策略选择航行方向;
23.模式3的航迹修正:在模式3下,预测船舶将在缓冲区外开始穿过缓冲区航行,此情况下判定船舶将绕过缓冲区航行,将预测航迹进入缓冲区的交点记为入点,穿出缓冲区的交点记为出点,则入点之前的航迹段保持不变,入点之后的航迹段在缓冲区边缘根据方向优先策略或距离优先策略进行修正,出点后的航迹段作为新的l送入步骤(201)进行递归处理;
24.模式
‑
1的航迹修正:在模式
‑
1下,预测船舶将在缓冲区外开始多次穿过缓冲区航行,此情况下判定船舶将绕过缓冲区航行,将预测航迹首次进入缓冲区的交点记为首次入点,首次穿出缓冲区的交点记为首次出点,则首次入点前航迹段保持不变,首次入点后的航迹段在缓冲区边缘根据方向优先策略进行修正,首次出点后的航迹段作为新的l送入步骤(201)进行递归处理;
25.其中,方向优先策略是指,计算交点处航迹前进方向与交点处缓冲区边缘的逆时针方向的夹角,若夹角小于90
°
,则沿顺时针方向绕行,否则沿逆时针方向绕行;
26.距离优先策略是指,计算缓冲区边缘上从入点到出点的顺时针距离和逆时针距离,选定距离较短的方向为绕行方向。
27.进一步的,mp的生成方式为,在全球海岸线mp0的基础上,针对开阔海域,以12海里为缓冲距离,基于开阔海域内领海基线或海岸线生成缓冲区域;针对海峡、群岛、内河区域,在保证区域拓扑关系不变的前提下,以指定距离为缓冲距离生成缓冲区域。
28.本发明采用上述技术方案所取得的有益效果在于:
29.1、本发明对陆地缓冲区进行了差异化处理,从而使航迹修正更加准确。
30.2、本发明方法简单易行,其在分析典型关系模式的基础上,制定了不同模式下的航迹修正策略,是对现有各类船舶航迹预测方法的有效补充。
附图说明
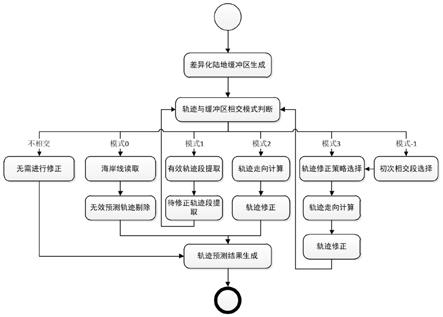
31.图1是本发明实施例方法的整体流程图。
32.图2是关系模式的判断原理示意图。
33.图3是不关系模式的示意图。
34.图4是模式0示意图。
35.图5是模式1示意图。
36.图6是模式2示意图。
37.图7是模式3示意图。
38.图8是模式
‑
1示意图。
39.图9是方向选择策略示意图。
40.图10是红海
‑
苏伊士湾
‑
苏伊士运河差异化缓冲区示意图。
41.图11是修正前预测轨迹示意图。
42.图12是初次修正结果示意图。
43.图13是二次修正前预测轨迹示意图。
44.图14是修正完成后预测轨迹示意图。
具体实施方式
45.下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
46.一种基于海陆关系的船舶预测航迹修正方法,其流程如下:
47.(1)生成差异化陆地缓冲区,为准确刻画船舶在开阔海域、海峡、群岛、内河等不同环境下可通行区域,借助gis缓冲区生成方法,以全球海岸线mp0=multipolygon(p1,p2,...,p
σ
)为依据,分别针对上述情况制定差异化陆地缓冲区生成策略,最终融合形成统一的全球船舶航行区域mp。mp与mp0具有相同的数据格式。
48.(2)判断航迹与缓冲区关系模式,航迹l=(p1,p2,...p
m
)为一段长度为m的预测航迹。基于l第一个点p1与mp的包含关系、l与mp的交集情况以及交点数量,判断预测航迹与缓冲区的关系模式,如图2所示。
49.(3)模式0预测航迹修正,在模式0下,预测船舶在进入缓冲区范围后继续向前运动,此情况下判定船舶将发生靠岸行为,船舶在航迹与海岸线相交处停止前行,航迹在该处截断。
50.(4)模式1预测航迹修正,在模式1下,预测船舶在缓冲区内自内向外穿出,此情况下判定船舶将发生离港行为,船舶将穿出缓冲区后继续前行,缓冲区内航迹段保持不变,缓冲区外航迹段送入步骤(2)进行递归处理。
51.(5)模式2预测航迹修正,在模式2下,预测船舶在缓冲区外向内进入缓冲区,此情况下判定船舶将沿着缓冲区边缘航行,即船舶在抵达缓冲区边缘后,依据船舶运动方向与缓冲区边缘逆时针方向夹角,在最小化转向角度的原则下选择航行方向。
52.(6)模式3预测航迹修正,在模式3下,预测船舶将在缓冲区外开始穿过缓冲区航行,此情况下判定船舶将绕过缓冲区航行,以预测航迹与缓冲区的两个交点(分别称为入点和出点)为划分,入点前航迹段保持不变,入点后航迹段在缓冲区边缘沿绕行方向进行修正,从出点穿出后继续沿原预测航迹方向延伸,将出点后航迹段送入步骤(2)进行递归处
理。
53.(7)模式
‑
1预测航迹修正,在模式
‑
1下,预测船舶将在缓冲区外开始多次穿过缓冲区航行,此情况下判定船舶将绕过缓冲区航行,以预测航迹首次穿行缓冲区产生的两个交点(分别称为入点和出点)为划分,入点前航迹段保持不变,入点后航迹段在缓冲区边缘沿绕行方向进行修正,从出点穿出后继续沿原预测航迹方向延伸,将出点后航迹段送入步骤(2)进行递归处理。
54.其中,步骤(1)包括如下步骤:
55.(101)在开阔海域内,船舶航行路线一般不会进入他国领海区域内,因此以12海里为缓冲距离,基于开阔海域内领海基线或海岸线生成缓冲区域mp1,数据格式与mp0相同;
56.(102)在海峡、群岛、内河等海域内,船舶出于通航需求会进入领海范围内,因此在上述区域在保证区域拓扑关系不变的前提下,以指定距离为缓冲距离生成缓冲区域mp2,数据格式与mp0相同。
57.(103)对上述缓冲区域进行融合,得到全球缓冲区mp,数据格式与mp0相同。
58.步骤(2)包括如下步骤:
59.(201)若l与mp无交集,则说明并未出现航迹预测结果出现在陆地上的情况,无需进行航迹修正。如图3所示;
60.(202)若l与mp有交集,则获取与l相交的第一个多边形p
θ
,判断l与p
θ
的边的交点数量,若交点数量为0,则说明预测航迹完全出现在p
θ
内部,如图4所示,定义为模式0,跳转至步骤(3);
61.(203)若交点数量为1,则判断l第一个点p1与p
θ
的包含情况,若p1在p
θ
内,则预测航迹自内向外出缓冲区,如图5所示,定义为模式1,跳转至步骤(4);
62.(204)若交点数量为1,则判断l第一个点p1与p
θ
的包含情况,若p1在p
θ
外,则预测航迹自外向内进入缓冲区内,如图6所示,定义为模式2,跳转至步骤(5);
63.(205)若l与p
θ
的边的交点数量为2,则预测航迹贯穿缓冲区,如图7所示,定义为模式3,跳转至步骤(6);
64.(206)若l与p
θ
的边的交点数量大于2,则预测航迹多次贯穿缓冲区,如图8所示,定义为模式
‑
1,跳转至步骤(7)。
65.其中,步骤(3)包括如下步骤:
66.(301)获取预测航迹l与全球海岸线mp0中第一次相交的多边形p
f
;
67.(302)计算l与p
f
的交点;
68.(303)在交点处对l进行截断,仅保留交点前的航迹段,得到修正后的预测航迹。
69.其中,步骤(4)包括如下步骤:
70.(401)计算l与p
θ
的交点;
71.(402)在交点处对l进行截断,交点前航迹段保持不变,将交点后航迹段作为初始航迹跳转至步骤(2)进行递归处理,并将交点前航迹段与递归处理后的结果拼接,得到修正后的预测航迹。
72.其中,步骤(5)包括如下步骤:
73.(501)计算l与p
θ
的交点o;
74.(502)计算交点o处航迹前进方向与缓冲区边缘逆时针方向的夹角,以此判定船舶
航行方向,如图9所示,计算方式如下:
75.当时,航迹前进方向与缓冲区边缘逆时针方向夹角小于90
°
,绕行方向为逆时针方向,当时,航迹前进方向与缓冲区边缘逆时针方向的夹角大于等于90
°
,绕行方向为顺时针方向。
76.(503)依据船舶航行方向沿着缓冲区边缘对路径进行修正。
77.其中,步骤(6)包括如下步骤:
78.(601)计算l与p
θ
的交点o
in
和o
out
;
79.(602)选择绕行策略:方向优先或距离优先;
80.(603)在方向优先策略下,计算交点o
in
处航迹前进方向与缓冲区边缘逆时针方向的夹角,以此判定船舶绕行方向;
81.(604)在距离优先策略下,计算缓冲区边缘上从o
in
到o
out
顺时针和逆时针距离,选定距离较短方向为绕行方向;
82.(605)将l在缓冲区边缘上沿绕行方向进行调整,修正结果由三部分组成,第一部分为预测航迹l中o
in
点前航迹段,第二部分为缓冲区边缘上从o
in
到o
out
的航迹段,第三部分为将预测航迹l中o
out
点后航迹段作为输入航迹跳转到步骤(2)递归处理后得到的航迹段。
83.其中,步骤(7)包括如下步骤:
84.(701)计算l第一次穿过p
θ
时产生的交点o
in
和o
out
;
85.(702)跳转至步骤(603)。
86.以下为一个更具体的例子:
87.如图1所示,一种基于海陆约束的船舶预测轨迹修正方法,包括以下步骤:
88.(1)差异化陆地缓冲区生成
89.为准确刻画船舶在开阔海域、海峡、群岛、内河等不同环境下可通行区域,借助gis缓冲区生成方法,以全球海岸线mp0=multipolygon(p1,p2,...,p
σ
)为依据,分别针对上述情况制定差异化陆地缓冲区生成策略,最终融合形成统一的全球船舶航行区域。mp0是由σ个多边形组成的multipolygon矢量对象,其中每个多边形对象为由π个地理坐标点首尾依次连接围城的闭合矢量面。
90.(101)在开阔海域内,船舶航行路线一般不会进入他国领海区域内,因此以12海里为缓冲距离,基于开阔海域内领海基线或海岸线生成缓冲区域mp1,数据格式与mp0相同;
91.(102)在海峡、群岛、内河等海域内,船舶出于通航需求会进入领海范围内,因此在上述区域在保证区域拓扑关系不变的前提下,以指定距离为缓冲距离生成缓冲区,数据格式与mp0相同。以红海
‑
苏伊士湾
‑
苏伊士运河为例,在红海处缓冲距离为12海里,苏伊士湾处缓冲距离为1海里,苏伊士运河处缓冲距离为10米。
92.(103)对上述缓冲区域进行融合,得到全球缓冲区mp,数据格式与mp0相同。图10是依据上述方法生成的红海
‑
苏伊士湾
‑
苏伊士运河差异化缓冲区示意图。
93.(2)轨迹与缓冲区关系模式判断
94.基于海上部分船只点位数据,简单采用线性回归算法得到其未来航行路径预测结果,以此为例说明本发明对船舶预测轨迹的修正过程:
95.如图11所示,预测轨迹l与缓冲区mp相交,且与第一个相交的多边形p
θ
交点数量为
2,预测轨迹l贯穿该多边形,关系模式为模式3。跳转至步骤(3)。
96.(3)模式3预测轨迹修正
97.(301)计算l与p
θ
的交点o
in
和o
out
;
98.(302)选择绕行策略为距离优先,跳转至(304);
99.(304)在距离优先策略下,计算缓冲区边缘上从o
in
到o
out
顺时针和逆时针距离,经计算,o
in
至o
out
顺时针距离小于逆时针距离,选定顺时针为绕行方向;
100.(305)将l在缓冲区边缘上沿绕行方向进行调整,修正结果由三部分组成,第一部分为预测轨迹l中o
in
点前轨迹段,第二部分为缓冲区边缘上从o
in
到o
out
的轨迹段,第三部分为将预测轨迹l中o
out
点后轨迹段作为输入轨迹跳转到步骤(2)递归处理后得到的轨迹段。图12是初次修正结果示意图。
101.(4)如图13所示,预测轨迹l与缓冲区mp相交,且与第一个相交的多边形p
θ
交点数量为1,预测轨迹l由外向内进入缓冲区,关系模式为模式2。跳转至步骤(5)。
102.(5)模式2预测轨迹修正
103.(501)计算l与p
θ
的交点o;
104.(502)计算交点o处轨迹与缓冲区边缘的夹角,经计算,轨迹前进方向与缓冲区边缘逆时针方向夹角小于90
°
,因此选定逆时针方向为绕行方向;
105.(503)依据船舶航行方向沿着缓冲区边缘对路径进行修正。图14是修正完成后预测轨迹示意图。
106.总之,本发明针对当前各类船舶航迹预测算法中未充分考虑海陆约束,导致部分预测结果出现在陆地上的问题,提出一种基于差异化海岸线缓冲区的预测结果修正方法。该方法首先针对水上通行环境中常见的开阔海域、海峡、群岛、内河等进行差异化缓冲区计算,在不改变原有拓扑关系的情况下生成船舶可通行区域。在此基础上,细致化分析了预测轨迹与可通行区域边缘的典型关系模式,并针对不同模式设计了预测轨迹修正策略,能够较好的改正现有各类算法的输出结果,是对现有各类船舶航迹预测方法的有效补充。
107.尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1