水下机器人系统的制作方法
1.本技术涉及水下设备领域,具体涉及一种水下机器人系统。
背景技术:
2.传统水面监控平台主要用于水文水质气象和海洋环境地质监测,如观测海洋中温度、电导、盐度、叶绿素和浊度等性质,利用高精度细分层剖面流速仪实时观测海底近地层流速流向和地形的瞬间变化,并结合测量投放点的垂直海流流速流向和波浪特征参数,建立气象、波浪、剖面流速、湍流和海底地形地貌的冲积变化的立体观测海洋系统。
3.随着需求的扩展,传统水面监控平台已经不满足监测和探测的要求。水下机器人可用于水下特定地点和水下环境的监测和探查。常用的缆控水下机器人通过脐带缆进行供电和通信,需要由脐带缆通过缆轴连接岸电和水下机器人。水下机器人可以进行移动和控制的距离和脐带缆的缆长正相关,但是过长的缆长会导致通信效果变差、需要高压供电以降低损耗,更会带来整体重量过重、运输困难、造价过高等诸多问题。另外,现有的水下机器人如果要实现动力定位功能,需要在水下机器人的母船上集成有动力定位设备,带有动力定位设备的母船造价高昂且租赁费用极高。
技术实现要素:
4.基于此,本技术提供了一种水下机器人系统,通过水面支持装置为水下机器人进行供电和通信,降低水下机器人的供电及通信的成本。
5.本技术的一个实施例提供一种水下机器人系统,包括:控制站、水面支持装置和水下机器人,所述水面支持装置通过第一线缆连接所述水下机器人;所述控制站包括:第一控制单元和第一通信单元,所述第一通信单元连接所述第一控制单元;所述水面支持装置包括:浮力块,为所述水面支持装置提供浮力;发电单元,用于产生电能;储能单元,连接所述发电单元,所述储能单元为所述水面支持装置和水下机器人供电;第二通信单元,用于收发信息;运动单元,带动所述水面支持装置移动;第二控制单元,所述发电单元、储能单元、第二通信单元和运动单元分别连接所述第二控制单元。
6.根据本技术的一些实施例,所述水面支持装置还包括水面定位单元,所述水面定位单元连接所述第二控制单元,所述水面定位单元用于确定所述水面支持装置的艏向和位置。
7.根据本技术的一些实施例,所述水面支持装置还包括声纳或超短基线定位单元,所述声纳或超短基线定位单元连接所述第二控制单元。
8.根据本技术的一些实施例,所述水面支持装置还包括流速流向仪,所述流速流向仪连接所述第二控制单元。
9.根据本技术的一些实施例,所述水面支持装置还包括水质传感器,所述水质传感器连接所述第二控制单元。
10.根据本技术的一些实施例,所述水面支持装置还包括短基线定位单元或长基线定
位单元,所述水面支持装置的数量为多个。
11.根据本技术的一些实施例,所述控制站还包括岸站电源,所述第一控制单元连接所述岸站电源,所述岸站电源连接所述储能单元。
12.根据本技术的一些实施例,所述控制站还包括显示单元,所述显示单元连接所述第一控制单元。
13.根据本技术的一些实施例,所述发电单元为风能发电组件、太阳能发电组件、潮汐能发电组件、波浪能发电组件、温差能发电组件中的一种或多种。
14.根据本技术的一些实施例,所述水下机器人上设置九轴传感器,所述九轴传感器用于检测所述水下机器人的姿态。
15.本技术的水下机器人系统,通过水面支持装置为水下机器人供电,降低制造成本和供电损耗;水面支持装置的水面定位单元和运动单元配合,可实现水面支持装置的低成本动力定位。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
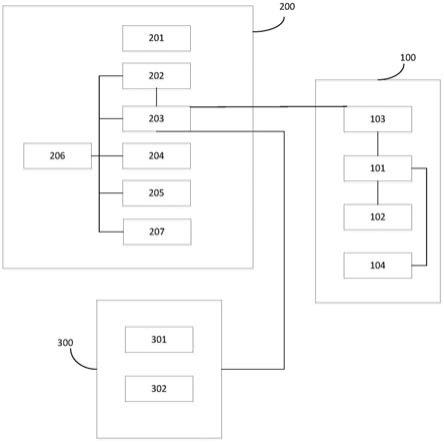
17.图1是本技术水下机器人系统的示意图。
具体实施方式
18.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
19.如图1所示,本技术的实施例提供一种水下机器人系统。水下机器人系统包括控制站100、水面支持装置200和水下机器人300。水面支持装置200通过第一线缆连接水下机器人300。水面支持装置200可为水下机器人300进行供电,控制站100与水面支持装置200通信连接,水面支持装置200与水下机器人300通信连接,操控人员可通过控制站100对水下机器人300进行控制。本技术的水下机器人300主要为缆控水下机器人。
20.控制站100包括:第一控制单元101和第一通信单元102,第一通信单元102连接第一控制单元101。第一通信单元102用于收发信息,并将收发的信息发送给第一控制单元101进行处理。第一控制单元101用于控制站100的数据处理,并对控制站100的各个单元进行控制。操控人员通过控制站100对水面支持装置200和水下机器人300进行控制。控制站100可以设置在水岸上,也可以设置在母船上,本技术不对控制站100设置的位置进行限制。
21.水面支持装置200包括:浮力块201、发电单元202、储能单元203、第二通信单元204、运动单元205和第二控制单元206。
22.浮力块201为水面支持装置提供浮力,使得水面支持装置200漂浮在水面上。水面支持装置200的其它各个单元均设置于浮力块201上。本技术的浮力块201可选择内部为空
腔的金属壳。
23.发电单元202用于产生电能。储能单元203连接发电单元202,发电单元202产生的电能存储在储能单元203中。储能单元203为水面支持装置200的各个电器元件供电。同时,储能单元203通过第一线缆连接水下机器人300,储能单元203为水下机器人300供电。通过水面支持装置200为水下机器人300供电,降低供电消耗,避免了脐带缆的长度对水下机器人300活动范围的限制。
24.第二通信单元204用于收发信息。通过第二通信单元204,水面支持装置200可与控制站100或水下机器人300进行通信。可选地,第二通信单元204集成4g/5g/wifi/蓝牙/红外等多种通信组件,实现水面支持装置200与控制站100的无线通信,避免了脐带缆对通信距离的限制,提高通信效率。
25.可选地,水下机器人300包括第三通信单元301,第三通信单元301可以为有线通信组件,第二通信单元204集成有有线通信组件,第二通信单元204通过第一线缆连接第三通信单元301,实现水面支持装置200与水下机器人300的通信。
26.运动单元205为水面支持装置200的动力部分,带动水面支持装置200移动。运动单元205可以为水下推进器。
27.第二控制单元206分别连接发电单元202、储能单元203、第二通信单元204和运动单元205。第二控制单元206用于水面支持装置200的数据处理,并对水面支持装置200的各个单元进行控制。
28.本技术的水下机器人系统,通过水面支持装置200为水下机器人300供电,避免了脐带缆的长度对水下机器人300活动范围的限制。需要对水面支持装置200进行操控时,操控人员通过控制站100的第一通信单元102向水面支持装置200发送控制信号,第二通信单元204收到控制信号后,发送给第二控制单元206,第二控制单元206根据信号对水面支持装置200进行控制。需要对水下机器人进行操控时,操控人员通过第一通信单元102向向水面支持装置200发送控制信号,第二通信单元204收到控制信号后,发送给第二控制单元206,第二控制单元206判断控制信号为对水下机器人300的控制信号后,控制第二通信单元204将控制信号发送给水下机器人300,实现对水下机器人300的控制。
29.根据本技术一个可选的技术方案,水面支持装置200还包括水面定位单元207,水面定位单元207可以为gps定位组件,也可以为北斗定位组件。水面定位单元207连接第二控制单元206。水面定位单元207用于确定水面支持装置200在水面的艏向和位置。通过第二通信单元204将水面支持装置200在水面的艏向和位置发送给控制站100,方便操控人员实时掌握水面支持装置200在水面的艏向和位置。
30.可选地,水面定位单元207和运动单元205配合,实现水面支持装置200的动力定位。动力定位是指水面设备在水面的艏向和位置保持不变。水面定位单元207将水面支持装置200在水面的实时艏向和位置发送给第二控制单元206,第二控制单元206如果判断水面支持装置200的艏向偏离预设艏向超过预设值或实时位置偏离预设位置超过预设值,则启动运动单元205,使水面支持装置200恢复至预设艏向或预设位置。水面支持装置200的体积及重量远远小于母船,对水面支持装置200进行动力定位的成本很低。
31.根据本技术一个可选的技术方案,水面支持装置200还包括声纳或超短基线定位单元,声纳或超短基线定位单元连接第二控制单元206。声纳或超短基线定位单元可用于确
定水下机器人300相对水面支持装置200的位置,通过水下机器人300相对水面支持装置200的位置叠加水面支持装置200的位置,可以确定水下机器人300在水中的位置。本实施例的超短基线定位单元可选用已有的超短基线定位组件。
32.根据本技术一个可选的技术方案,水面支持装置200还包括流速流向仪,流速流向仪连接第二控制单元206。流速流向仪用于测量水面支持装置200所在水域的水的流速和流向。
33.根据本技术一个可选的技术方案,水面支持装置200还包括水质传感器,水质传感器连接第二控制单元206。水质传感器用于检测水面支持装置200所在水域的水质。
34.根据本技术一个可选的技术方案,水面支持装置200还包括短基线定位单元或长基线定位单元,短基线定位单元可选用已有的短基线定位组件,长基线定位可选用已有的长基线定位组件。水面支持装置200的数量为多个。通过多个水面支持装置200的组合,实现短基线或者长基线的水下机器人定位。
35.传统的水下机器人的水下定位需要使用gnss结合水下声学定位系统,造价高昂且布设要求极高,容易受到水下地形等多种干扰,特别是在浅水区性价比极低。本技术所述的浅水区是指水面至海底的距离在1000米以内的水域。本技术通过水面定位单元实现水面支持装置的水面坐标定位,在此基础上,结合声学定位,或超短基线定位,或短基线定位,或长基线定位,确定水下机器人的位置,实现低成本高准确度的定位。在浅水区避免其他因素的干扰,定位精度高。
36.根据本技术一个可选的技术方案,控制站100还包括岸站电源103。第一控制单元101连接岸站电源103,岸站电源103连接储能单元203。岸站电源103可用于为控制站100的各个电源供电。岸站电源103通过第二线缆连接储能单元203,为储能单元203供电,可进一步保证水下机器人300的用电安全。例如,由于天气原因,发电单元202产生的电能不足以满足水面支持装置200和水下机器人300的用电负荷时,可先通过岸站电源103将储能单元203充满电后,再控制水面支持装置200和水下机器人300工作。
37.根据本技术一个可选的技术方案,控制站100还包括显示单元104,显示单元104连接第一控制单元101。显示单元104可根据第一控制单元101提供的信息显示水面支持装置200和水下机器人300的运行状态。
38.根据本技术一个可选的技术方案,发电单元202为风能发电组件、太阳能发电组件、潮汐能发电组件、波浪能发电组件、温差能发电组件中的一种或多种。
39.根据本技术一个可选的技术方案,水下机器人300上设置九轴传感器302,九轴传感器302用于检测水下机器人300在水中的姿态。九轴传感器302检测的水下机器人300的姿态信息通过第三通信单元301发送给第二通信单元204,第二通信单元204将水下机器人300的姿态信息发送给第一通信单元102,操控人员通过控制站100掌握水下机器人300的实时姿态。
40.本技术的水下机器人系统,通过水面支持装置为水下机器人供电,降低水下机器人的供电成本,水面支持装置的动力定位成本低,便于实现对水下机器人的定位,解决了传统缆控水下机器人通信距离受脐带缆限制的问题。
41.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同
时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1