全自动曝气船
1.本发明涉及水质处理技术领域,具体涉及一种全自动曝气船。
背景技术:
2.随着水环境不断地富营养化,向水体曝气已经成为水体治理的一种重要手段。现在曝气处理一般都是通过人工手动操作,依靠人工将曝气机运送到污染地区,最后进行曝气处理。但是人工长时间的重复劳动容易导致疲劳,同时人工运输耗时长也不一定能够覆盖污染源,难以实现全覆盖高效率的曝气处理,长时间的运输需要耗费大量的劳动力,不利于利益最大化。
技术实现要素:
3.本发明要解决的技术问题在于针对上述现有技术存在的不足,提供一种全自动曝气船,可以根据事先绘制的巡航轨迹进行航行,在巡航过程中可以根据采集的数据判断水质污染的程度,并自动对污染水体进行曝气处理。
4.本发明为解决上述提出的技术问题所采用的技术方案为:
5.一种全自动曝气船,包括船体以及安装于所述船体上的转向动力装置、高压容器泵机构、水质监测传感器、能源自给系统、路径规划系统和监测控制系统;
6.所述转向动力装置用于控制船的方向并为船提供动力,包括转向机构和动力机构;所述转向机构包括转向驱动电机、旋转平台、支杆和绝对值编码器,所述转向驱动电机驱动所述旋转平台旋转,所述支杆与所述旋转平台固定连接并随旋转平台同步转动,所述绝对值编码器设置于旋转平台上方并与所述支杆同轴固定连接;所述动力机构整体安装于所述转向机构的下方,动力机构包括动力驱动电机壳体、动力驱动电机和推进器,所述动力驱动电机壳体固定安装于所述支杆的下端,所述动力驱动电机安装于所述动力驱动电机壳体内部,并与所述推进器连接,用于驱动推进器旋转;
7.所述高压容器泵机构包括依次相连的入水管、容器泵、气液混合罐和出水管,所述容器泵上设有空气入口;
8.所述能源自给系统包括太阳能电池板和蓄电池,所述太阳能电池板将太阳能转化为电能为曝气船供电,并将多余的电能储存在所述蓄电池中;
9.所述路径规划系统根据曝气船所在区域绘制航行边界点以及巡航轨迹,曝气船根据事先绘制的巡航轨迹进行航行;当曝气船开始自动航行时,所述监测控制系统根据所述转向机构的绝对值编码器所测定的角度与绘制轨迹之间的角度对比从而控制所述转向驱动电机实现角度的矫正,同时控制所述动力驱动电机实现船体的驱动;
10.所述监测控制系统在曝气船行进过程中实时监测所述水质监测传感器的监测数据,当监测数据低于设定阈值时,监测控制系统控制所述高压容器泵机构启动,实现水体治理的曝气处理。
11.上述方案中,所述转向机构的旋转平台包括固定部和旋转部,所述固定部内部通
过轴承安装有转子,所述转向驱动电机的驱动轴与所述转子同轴固定连接,所述转子与旋转部之间设有齿轮,通过齿轮将转向驱动电机与转子的转动传动至所述旋转部,使旋转部绕自身轴线旋转;所述旋转部中部开设用于所述支杆穿过的开孔,所述支杆通过第一连接件与所述旋转部固定连接。
12.上述方案中,所述绝对值编码器设置于所述旋转平台上方,并通过第二连接件与所述支杆同轴固定连接。
13.上述方案中,所述支杆为空心杆,所述动力驱动电机的电源线和信号线从所述支杆内部穿出;所述支杆上部设有滑环,用于旋转体连通、输送能源与信号。
14.上述方案中,所述转向机构还包括方位指示管和方位指示箭头,所述方位指示管下端与所述支杆上端同轴固定连接,所述方位指示箭头固定安装于所述方位指示管上端面。
15.上述方案中,所述动力机构还包括推进保护装置,所述推进保护装置安装于所述推进器外周,并与所述动力驱动电机壳体固定连接。
16.上述方案中,所述转向动力装置有两个,分别安装于船体的首尾两端。
17.上述方案中,所述高压容器泵机构的入水管上设有入水调节阀,所述容器泵上还设有入水真空压力表,所述气液混合罐上设有压力调节阀,所述出水管上设有出水压力表和出水调节阀;各个阀门和压力表分别与所述监测控制系统信号连接,监测控制系统根据各压力表的监测数据反馈调节各阀门。
18.上述方案中,所述高压容器泵机构的出水管末端设有溶气释放器,用于向水中释放细微气泡提高治理效率。
19.上述方案中,所述高压容器泵机构在船体中部排列设置多个;所述太阳能电池板覆盖于船身四周。
20.本发明的有益效果在于:
21.1、本发明的全自动曝气船可以根据事先绘制的巡航轨迹进行航行,在巡航过程中可以根据采集的数据判断水质污染的程度,并自动对污染水体进行曝气处理,提高了工作效率,降低劳动强度,替换机器人降低了成本。
22.2、本发明的转向动力装置包括垂向布置的转向机构和动力机构,可实现船的方向的控制同时为船提供动力,转向动力装置结构简单,布置紧凑,成本低。
23.3、本发明的高压容器泵机构包括入水管、容器泵、气液混合罐和出水管,节约成本,使用简单,效率高,性价比高。
附图说明
24.下面将结合附图及实施例对本发明作进一步说明,附图中:
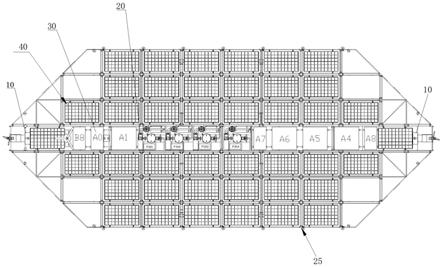
25.图1是本发明全自动曝气船的整体结构俯视图;
26.图2是本发明全自动曝气船的整体结构主视图;
27.图3是图1所示全自动曝气船的转向动力装置的整体结构图;
28.图4是图3所示转向动力装置去掉箱体之后的结构图;
29.图5是图4所示转向动力装置的局部结构剖视图;
30.图6是图1所示全自动曝气船的高压容器泵机构的结构示意图。
31.图中:10、转向动力装置;11、转向机构;111、转向驱动电机;1111、驱动轴;112、旋转平台;1121、固定部;1122、旋转部;1123、转子;1124、齿轮;1125、第一连接件;113、支杆;1131、带方形座轴承;114、绝对值编码器;1141、第二连接件;115、滑环;116、方位指示管;117、方位指示箭头;118、第一箱体;119、第二箱体;12、动力机构;121、动力驱动电机壳体;122、推进器;123、推进保护装置;
32.20、高压容器泵机构;21、入水管;211、入水调节阀;22、容器泵;221、空气入口;222、入水真空压力表;23、气液混合罐;231、压力调节阀;24、出水管;241、出水压力表;242、出水调节阀;25、溶气释放器;
33.30、水质监测传感器;
34.40、太阳能电池板。
具体实施方式
35.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
36.如图1-2所示,为本发明实施例提供的一种全自动曝气船,包括船体以及安装于船体上的转向动力装置10、高压容器泵机构20、水质监测传感器30、能源自给系统、路径规划系统和监测控制系统。其中,转向动力装置10有两个,分别安装于船体的首尾两端,用于控制船的方向并为船提供动力。高压容器泵机构20有四个,并排布置在船体中央,用于对污染水质进行曝气处理。水质监测传感器30布置于高压容器泵机构20一侧,并伸入水中便于监测水质。路径规划系统和监测控制系统均布置于机柜中,机柜布置于高压容器泵机构20的两侧。能源自给系统包括太阳能电池板40和蓄电池,太阳能电池板40覆盖于船身四周,蓄电池布置于机柜中,太阳能电池板40将太阳能转化为电能为曝气船供电,并将多余的电能储存在蓄电池中。
37.如图3-5所示,转向动力装置10包括转向机构11和动力机构12,转向机构11负责调节曝气船行进方向,动力机构12负责为曝气船提供驱动动力。转向机构11包括转向驱动电机111、旋转平台112、支杆113和绝对值编码器114,转向驱动电机111驱动旋转平台112实现360
°
旋转,支杆113竖直布置并与旋转平台112固定连接并随旋转平台112同步转动,绝对值编码器114设置于旋转平台112上方并与支杆113同轴固定连接,用于测定转动的绝对角度。动力机构12整体安装于转向机构11的下方,动力机构12包括动力驱动电机壳体121、动力驱动电机和推进器122,动力驱动电机壳体121固定安装于支杆113的下端,当支杆113转动时带动整个动力机构12同步转动。动力驱动电机安装于动力驱动电机壳体121内部,并与推进器122连接,用于驱动推进器122旋转,使曝气船前进或后退。
38.如图6所示,高压容器泵机构20包括通过管道依次相连的入水管21、容器泵22、气液混合罐23和出水管24。其中,入水管21上设有入水调节阀211,入水调节阀211可进行水流真空压的调节;容器泵22上设有空气入口221和入水真空压力表222;气液混合罐23上设有压力调节阀231;出水管24上设有出水压力表241和出水调节阀242。入水管21吸进的水流会与来自空气入口221的空气混合后经过入水真空压力表222检测后进入容器泵22,并在容器泵22内进行高压曝气处理,之后将处理完的水流排入气液混合罐23;在气液混合罐23内实现水与空气的充分接触传质,使空气溶入水中,尽量达到饱和程度,压力调节阀231会根据
气液混合罐23中的压力情况进行适当调节,然后通过出水压力表241的检测后经过出水管24与出水调节阀242排出水体。各个阀门和压力表分别与监测控制系统进行信号连接,监测控制系统根据各压力表的监测信号实现阀门的自动反馈调节。
39.路径规划系统根据曝气船所在区域绘制航行边界点以及巡航轨迹,曝气船会根据事先绘制的巡航轨迹进行航行。当曝气船开始自动航行时,监测控制系统根据转向机构11的绝对值编码器114所测定的角度与绘制轨迹之间的角度对比从而控制转向驱动电机111实现角度的矫正,同时控制动力驱动电机实现对船体的驱动。
40.监测控制系统在曝气船自动航行过程中实时监测水质监测传感器30的监测数据,当监测数据(主要是溶氧量含量)低于设定阈值时,监测控制系统控制高压容器泵机构20启动,实现水体治理的曝气处理。
41.进一步优化,本实施例中,转向机构11的旋转平台112包括固定部1121和旋转部1122,固定部1121内部通过轴承安装有转子1123,转向驱动电机111的驱动轴1111与转子1123同轴固定连接,转子1123与旋转部1122之间设有齿轮1124,通过齿轮1124将转向驱动电机111与转子1123的转动传动至旋转部1122,使旋转部1122绕自身轴线旋转;旋转部1122中部开设用于支杆113穿过的开孔,支杆113通过第一连接件1125与旋转部1122固定连接。
42.进一步优化,本实施例中,绝对值编码器114设置于旋转平台112上方,并通过第二连接件1141与支杆113同轴固定连接。
43.进一步优化,本实施例中,支杆113为空心杆,动力驱动电机的电源线和信号线从支杆113内部穿出;支杆113上部设有滑环115,用于为旋转体连通、输送能源与信号。
44.进一步优化,本实施例中,转向机构11还包括方位指示管116和方位指示箭头117,方位指示管116下端与支杆113上端同轴固定连接,方位指示箭头117固定安装于方位指示管116上端面,显示曝气船实时行进方向。
45.进一步优化,本实施例中,转向机构11还包括第一箱体118和第二箱体119,其中,旋转平台112的旋转部1122和绝对值编码器114的安装于第一箱体118内,旋转平台112的固定部1121和转向驱动电机111安装于第二箱体119内。
46.进一步优化,本实施例中,转向机构11还包括安装于第二箱体119上的带方形座轴承1131,起到对支杆113的支撑作用。
47.进一步优化,本实施例中,动力机构12还包括推进保护装置123,推进保护装置123安装于推进器122外周,并与动力驱动电机壳体121固定连接。推进保护装置123用于防止推进器122在水体复杂的环境中被藻类植物或者垃圾影响其驱动功能。
48.进一步优化,本实施例中,转向驱动电机111采用行星减速直流无刷电机,动力驱动电机采用无刷推进器海优动力。
49.进一步优化,本实施例中,推进器122采用螺旋桨。
50.进一步优化,高压容器泵机构20的出水管24末端设有溶气释放器25,用于向水中释放细微气泡提高治理效率。
51.本发明的全自动曝气船可以根据事先绘制的巡航轨迹进行航行,在巡航过程中可以根据采集的数据判断水质污染的程度,并自动对污染水体进行曝气处理,提高了工作效率,降低劳动强度,替换机器人降低了成本。
52.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他
实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
53.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1