一种采用多尾协同矢量推进的机器鱿鱼
1.本发明涉及仿生机器人技术领域,尤其是一种采用多尾协同矢量推进的机器鱿鱼。
背景技术:
2.自主水下航行器(auv)在开发海洋资源的需求中得到了迅速发展。其中,带有鳍类的仿鱼形机器人可模仿鱼体的运动,可以对附着的流体做出积极的反应,实现稳定高效的推进功能,被认为是应用于无人水下航行器的最佳途径。
3.现有技术中,还没有能够精确模仿类鱿鱼的机器人,主要原因是鱿鱼多触须的摆动结构比较复杂。理论研究认为类鱿鱼机器人的多触须可以通过排列组合实现丰富的运动机制,具有高机动性的特征。在复杂水域环境,尤其是一些崎岖水道,展现它灵活的机动性能,为水下探测、军事作业和海洋资源利用等提供了诸多便利。高机动机器鱿鱼可以广泛应用在海洋高机动性作业场合,代替工作人员完成水下作业,有效地提高作业的安全性。因此,亟待设计一种可准确模拟鱿鱼多触手且可实现高机动推进的水下机器人。
技术实现要素:
4.针对现有技术的不足,本发明提供一种采用多尾协同矢量推进的机器鱿鱼,以实现鱿鱼机器人的水下推进功能,并利用正弦驱动来准确模拟水下鱿鱼触须摆动。
5.本发明采用的技术方案如下:
6.一种采用多尾协同矢量推进的机器鱿鱼,包括:
7.头部壳体,用于安装驱动机构,还用于与多个尾部单元连接;多个尾部单元,连接于所述头部壳体的后端,以头部壳体中心轴线为中心对称分布;
8.所述尾部单元采用正弦推进连杆机构;
9.驱动机构,设置在所述头部壳体中,包括第一电机和基座,所述第一电机用于驱动所述基座沿头部壳体轴向做往复运动,所述基座通过多组离合机构分别与多个尾部单元对应连接;
10.离合机构,包括第二电机和调节盘,所述第二电机的输出通过主动轴与所述调节盘连接,第二电机的本体通过调节轴与所述正弦推进连杆机构连接;所述调节盘与沿轴向设置在基座表面的滑槽滑动配合,调节盘内设有连杆滑块组件,连杆滑块组件的输入端与所述主动轴连接,连杆滑块组件的输出端可伸出调节盘将其锁紧在滑槽内;
11.所述离合机构以所述基座中心轴线为中心对称分布。
12.进一步技术方案为:
13.所述连杆滑块组件的结构包括一组间隔设置的滑动件,间隔设置的滑动件之间设有主动杆;所述主动杆的中部作为输出端与所述主动轴连接,所述主动杆的两端分别通过一从动杆与两侧的所述滑动件对应铰接,所述滑动件的外侧设有限位端,所述限位端作为输出端,可伸出所述调节盘,并与所述滑槽上的限位孔相配合。
14.所述滑槽的所述限位孔的沿滑槽长度方向间隔设有多组。
15.所述尾部单元包括前段壳体和后段壳体,所述前段壳体内设有前连杆、所述后段壳体内设有后连杆;
16.所述前连杆的前端与所述头部壳体铰接;
17.所述前连杆的后端与所述后连杆的前端铰接;所述后连杆的前端斜向上延伸形成支撑段;
18.所述前连杆的中部与一摇杆的一端铰接,所述摇杆另一端与所述调节轴铰接,所述摇杆中部通过一连接杆与所述支撑段的端部铰接。
19.所述尾部单元还包括尾板,其呈鱼尾结构,并与所述后段壳体的后端相连或一体成型。
20.所述头部壳体内固设有约束轴,所述基座的后端与所述约束轴滑动连接,所述基座的前端通过曲柄连杆机构与所述第一电机的输出连接。
21.所述头部壳体内设有前端板,其用于固定所述第一电机,所述头部壳体的后端设有后端板,其用于与所述尾部单元连接;前、后端板之间通过连接件固连;所述调节轴穿设于所述后端板中。
22.所述头部壳体的主体成圆筒状,其头部呈锥形,头部壳体的上表面两侧设有翼板。
23.所述第二电机对称设置在所述头部壳体中,第二电机的本体通过l形的电机座与所述调节轴固连。
24.本发明的有益效果如下:
25.1、本发明仅使用单个驱动电机实现多个执行模块的一体式同步运动,在提高效率的同时也确保运动规律的一致性。
26.2、本发明利用多连杆机构实现正弦运动,结合离合机构,能够准确地模拟鱿鱼触须的行波状摆动,具有较强的推进性能和机动效果。
附图说明
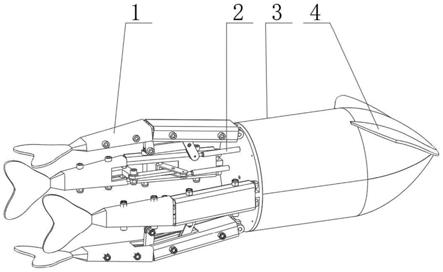
27.图1为本发明实施例四尾机器鱿鱼的立体结构示意图。
28.图2为本发明实施例四尾机器鱿鱼的部分分解结构示意图。
29.图3为本发明实施例四尾机器鱿鱼的离合机构的分解示意图。
30.图4为本发明实施例的调节盘的结构示意图。
31.图5为本发明实施例调节盘的剖视图。
32.图6为本发明实施例单个尾部单元的隐去前段壳体后安装结构示意图。
33.图7为本发明实施例两尾机器鱿鱼的内部结构示意图。
34.图8为本发明实施例四尾机器鱿鱼直行运动的扩展状态示意图。
35.图9为本发明实施例四尾机器鱿鱼直行运动的收缩状态示意图。
36.图10为本发明实施例四尾机器鱿鱼向右偏航运动的扩展状态示意图。
37.图11为本发明实施例四尾机器鱿鱼向右偏航运动的收缩状态示意图。
38.图12为本发明实施例四尾机器鱿鱼向左偏航运动的扩展状态示意图。
39.图13为本发明实施例四尾机器鱿鱼向左偏航运动的收缩状态示意图。
40.图14为本发明实施例四尾机器鱿鱼上浮运动的扩展状态示意图。
41.图15为本发明实施例四尾机器鱿鱼上浮运动的收缩状态示意图。
42.图16为本发明实施例四尾机器鱿鱼下潜运动的扩展状态示意图
43.图17为本发明实施例四尾机器鱿鱼下潜运动的收缩状态示意图。
44.图18为本发明实施例三尾机器鱿鱼的结构示意图。
45.图19为本发明实施例五尾机器鱿鱼的结构示意图。
46.图20为本发明实施例六尾机器鱿鱼的结构示意图。
47.图中:1、尾部单元;2、调节轴;3、头部壳体;4、翼板;5、基座;6、第一电机;7、第二电机;8、调节盘;9、滑槽;10、约束轴;11、滑动件;12、主动杆;13、从动杆;14、限位孔;15、主动轴;16、电机座;17、前连杆;18、摇杆;19、连接杆;20、后连杆;21、前端板;22、后端板;23、支撑连杆;24、曲柄件;25、连杆件;101、前段壳体;102、后段壳体;103、尾板;111、限位端;112、导向柱;201、支撑段;501、导向孔;801、导向槽;802、槽口。
具体实施方式
48.以下结合附图说明本发明的具体实施方式。
49.如图1-图5所示,本实施例的采用多尾协同矢量推进的机器鱿鱼,包括:
50.头部壳体3,如图1所示,用于安装驱动机构,还用于与多个尾部单元1连接;
51.多个尾部单元1,如图1所示,连接于头部壳体3的后端,以头部壳体3中心轴线为中心对称分布;尾部单元1采用正弦推进连杆机构;
52.驱动机构,如图2所示,设置在头部壳体3中,包括第一电机6和基座5,第一电机6用于驱动基座5沿头部壳体3轴向做往复运动,基座5通过多组离合机构分别与多个尾部单元1对应连接;
53.离合机构,如图3所示,包括第二电机7和调节盘8,第二电机7的输出通过主动轴15与调节盘8连接,第二电机7的本体通过调节轴2与正弦推进连杆机构连接;调节盘8与沿轴向设置在基座5表面的滑槽9滑动配合,调节盘8内设有连杆滑块组件,连杆滑块组件的输入端与主动轴15连接,连杆滑块组件的输出端可伸出调节盘8将其锁紧在滑槽9内;
54.具体的,离合机构以基座5中心轴线为中心对称分布。
55.具体的,如图3所示,基座5表面一周均匀分布有滑槽9,滑槽9沿轴向设置,滑槽9侧壁上设有限位孔14。
56.如图4和图5所示,连杆滑块组件的结构包括一组间隔设置的滑动件11,间隔设置的滑动件11之间设有主动杆12;
57.主动杆12的中部作为输入端与主动轴15连接,主动杆12的两端分别通过一从动杆13与两侧的滑动件11对应铰接,滑动件11的外侧设有限位端111,其作为输出端,调节盘8上设有供限位端111伸出的槽口802,限位端111伸出后与滑槽9上的限位孔14相配合。
58.具体的,调节盘8呈中空圆盘状,其内部形成滑动件11的平移空间,主动杆12位于两个滑动件11之间形成间隔之中,主动杆12中部设有与主动轴15连接的孔,两端分别与一从动杆13的一端连接,从动杆13另一端分别与滑动件11内侧中部铰接。在主动轴15作用下,主动杆12左右转动,两端分别通过从动杆13驱动滑动件11运动,使得两滑动件11相向运动或反向运动。
59.相向运动时,滑动件11相互靠近,外侧的限位端111缩回,使得调节盘8能沿滑槽9
滑动,基座5进行轴向运动时,如图3所示的调节盘8、主动轴15、第二电机6及调节轴2不随之运动,此时尾部单元相对于头部壳体1不发生摆动;
60.反向运动时,滑动件11相互远离,外侧的限位端111从调节盘8两侧的槽口802伸出并插入到如图3所示的滑槽9侧壁的限位孔14中,使得调节盘8无法沿滑槽9滑动,基座5进行轴向运动时,如图3所示的调节盘8、主动轴15、第二电机6及调节轴2随之运动,此时尾部单元相对于头部壳体1发生摆动,实现各尾部单元1实现正弦行波推进运动。
61.为了确保两个滑动件11的移动方向,调节盘8表面还设有导向槽801,滑动件11上设有与导向槽801配合的导向柱112,导向槽801通过导向柱112为滑动件11提供导向。
62.如图3所示,各滑槽9的限位孔14的沿滑槽9长度方向间隔设有多组。通过滑动件11的限位端111与不同的限位孔14配合,可以改变调节轴2伸入头部壳体1的长度,即与基座5的配合高度,进而改变各尾部单元1在作正弦行波运动时的相位。
63.如图6所示,尾部单元1包括前段壳体101和后段壳体102,前段壳体101内设有前连杆17、后段壳体102内设有后连杆20;
64.前连杆17的前端与头部壳体3铰接;
65.前连杆17的后端与后连杆20的前端铰接;后连杆20的前端斜向上延伸形成支撑段201;
66.前连杆17的中部与一摇杆18的一端铰接,摇杆18另一端与调节轴2铰接,摇杆18中部通过一连接杆19与支撑段201的端部铰接。
67.具体的,前段壳体101与前连杆17、后段壳体102与后连杆20分别通过紧固件锁紧连接。
68.具体的,尾部单元1还包括尾板103,其呈鱼尾结构,并与后段壳体102的后端相连或一体成型。
69.具体的,本实施例的尾部单元共设置4个,如图3所示,基座5呈截面为正方形的长方体结构,其四个侧面均分布有滑槽9,每个滑槽9内滑动连接一个调节盘8,分别通过第二电机7控制调节盘8与滑槽9的离合,实现各尾部单元1的并联控制。
70.各尾部单元并联工作,因此可以改变同时参与正弦行波推进运动的尾部单元数量,进而实现鱿鱼机器在水下的任意角度运动。当尾部单元同时作正弦运动时,鱿鱼机器可以直线推进,当有一个或多个尾部单元在其他尾部单元作正弦运动时不工作,机器鱿鱼即可向某一角度转向。这使得本技术在水下具有极高的机动性能。
71.如图7所示,为具有两个尾部单元1的机器鱿鱼结构(隐藏部分头部壳体),头部壳体3内沿其中轴线固设有约束轴10,基座5的后端与约束轴10滑动连接,基座5的前端通过曲柄连杆机构与第一电机6的输出连接。
72.具体的,如图7所示,曲柄连杆机构包括曲柄件24和连杆件25,曲柄件24一端与第一电机7的输出连接,另一端与连杆件25一端连接,连杆件25另一端与基座5连接,通过曲柄连杆机构实现基座5沿头部壳体3轴向往复运动。本领域技术人员可以理解,基座5中设有如图3所示的与约束轴滑动配合的导向孔501,且约束轴10为键轴,与导向孔501键配合使其只能轴向运动不能旋转运动。具体的,第二电机7对称设置在头部壳体3中,第二电机7通过l形的电机座16与调节轴2固连。
73.具体的,如图7所示,头部壳体3内设有前端板21,其用于固定第一电机6,头部壳体
3的后端设有后端板22,其用于与尾部单元1连接;前、后端板之间通过支撑连杆23固连;调节轴2穿设于后端板22中。
74.具体的,如图7所示,头部壳体3的主体成圆筒状,其头部呈锥形,头部壳体3的上表面两侧设有翼板4。
75.本技术的水下机器鱿鱼的各尾部单元并联工作,可以通过第二电机的控制,调整同时参与正弦行波推进运动的尾部单元的数量,进而实现机器鱿鱼在水下的任意角度运动。
76.如图8-图17所示,以四尾推进机器鱿鱼(具有abcd四个尾部单元)为例,说明其运动原理:
77.如图8和图9所示,当a、b、c、d四个尾部单元都分别通过离合机构接在基座上,即四个调节盘与对应的滑槽均锁紧时,在第一电机驱动下,四个尾部单元会同时作正弦行波推进运动从而产生向前的推力。图8、图9分别为基座在第一电机驱动下轴向后退、轴向前进状态下对应的尾部单元分别处于扩展状态、收缩状态的示意图。
78.如图10、图11所示,当a、d两个尾部单元均向右弯曲且与基座断开连接,即调节盘与对应的滑槽可相对滑动,同时b、c两个尾部单元连接基座并作正弦运动,此时机器鱿鱼可实现向右偏航。图10、图11分别为基座在第一电机驱动下轴向后退、轴向前进状态下对应的尾部单元分别处于扩展状态、收缩状态的示意图。
79.如图12、图13所示,当a、d两个尾部单元均向左弯曲且与基座断开连接,即调节盘与对应的滑槽可相对滑动,同时b、c两个尾部单元连接离合基座并作正弦运动,此时机器鱿鱼可实现向左偏航;图12、图13分别为基座在第一电机驱动下轴向后退、轴向前进状态下对应的尾部单元分别处于扩展状态、收缩状态的示意图。
80.如图14、图15所示,当b、c两个尾部单元均向上弯曲且与基座断开连接,即调节盘与对应的滑槽可相对滑动,同时a、d两个尾部单元连接基座并作正弦运动,此时机器鱿鱼可实现上仰;图14、图15分别为基座在第一电机驱动下轴向后退、轴向前进状态下对应的尾部单元分别处于扩展状态、收缩状态的示意图。
81.如图16、图17所示,当b、c两个尾部单元均向下弯曲与基座断开连接,即调节盘与对应的滑槽可相对滑动,同时a、d两个尾部单元连接基座并作正弦运动,此时机器鱿鱼可实现下潜。图16、图17分别为基座在第一电机驱动下轴向后退、轴向前进状态下对应的尾部单元分别处于扩展状态、收缩状态的示意图。
82.如图8-图17中,左半部分为主视图(隐藏部分头部壳体),右半部分为后视图。
83.如图18-图20所示,分别为三尾、五尾和六尾机器鱿鱼(隐藏部分头部壳体)的结构示意图。在空间和电机负荷能力的范围内,可以自由地调节触须(尾部单元)的数量,从而实现复杂的空间运动以达到最佳的推进效果。各尾部单元围绕头部壳体的中心轴线呈中心对称分布。
84.本技术的驱动机构驱动基座及离合机构做直线运动从而带动多连杆正弦推进机构做正弦运动,离合机构的第二电机可以控制各尾部与基座锁紧连接或松开滑动,从而控制各尾部摆动。通过合理规划各个尾部的运动形式实现多尾协同矢量推进,使机器鱿鱼完成水下三维游动的同时可以向任意角度转向前进,大幅提升了水下机动性能。
85.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此
项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1