一种用于水下机器人浮力材的隐藏式固定装置
本发明涉及水下机器人领域,具体地说是一种用于水下机器人浮力材的隐藏式固定装置。
背景技术:
1、随着人类对海洋资源的开发利用越来越重视,各式各样的水下机器人被研究制造出来,在水下机器人设计中有个重要的环节就是机器人本身的重力和在水中的浮力差值,由于水下机器人主体往往是由铝合金、钛合金等金属制成,其重量大于浮力,需要用浮力材配平,并且由于浮力材本身的材料加工性能相对于金属更好,所以也需要利用浮力材流线型设计保证水下机器人外形的水动力特性,但是现有技术中通常是利用螺栓将外形浮力材块体与机器人框架固定在一起,这需要在外形浮力块外表面加工多个孔,这样不仅对整个机器人水动力特性有一定影响,也影响整个水下机器人的美观。
技术实现思路
1、本发明的目的在于提供一种用于水下机器人浮力材的隐藏式固定装置,能够方便地实现浮力块和框架的安装和拆卸,而且结构紧凑占用空间小,可隐藏于浮力块角端空隙中,不会影响浮力块外表面。
2、本发明的目的是通过以下技术方案来实现的:
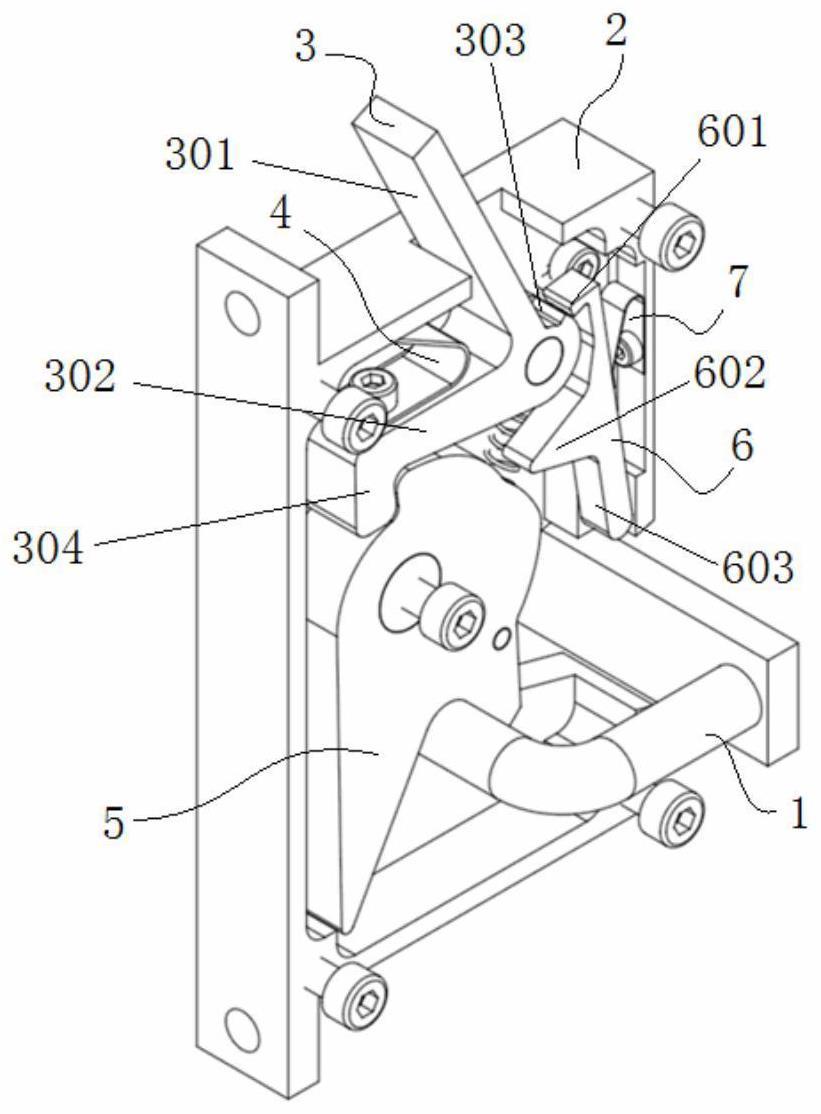
3、一种用于水下机器人浮力材的隐藏式固定装置,包括固定环、壳体以及设于所述壳体内的阻杆、凸轮、挂杆和复位弹簧,所述阻杆包括拨杆段和压杆段,所述拨杆段伸出至壳体外部,所述拨杆段和压杆段连接处转动设于所述壳体中并设有挂接凹槽,所述压杆段上设有阻杆拨片与壳体上端内侧面相抵,所述压杆段自由端设有凸轮挂钩部,所述凸轮转动设于壳体内,且所述凸轮上侧设有与所述凸轮挂钩部配合的限位凸起部,所述凸轮下侧设有与所述固定环挂接的挂接凸起部,所述限位凸起部与挂接凸起部之间设有侧弧面,所述挂杆下端转动设于所述壳体中,所述挂杆上端设有与所述挂接凹槽配合的挂杆挂钩部,所述挂杆中部设有朝向所述凸轮一侧的挂杆凸起部,所述挂杆远离凸轮一侧形成挂杆压面与设于所述壳体侧板内侧的挂杆拨片相抵。
4、所述壳体内设有凸轮转轴、阻杆转轴和挂杆轴孔,所述凸轮上设有凸轮轴孔套装于所述凸轮转轴上,所述阻杆的拨杆段和压杆段连接处设有阻杆轴孔套装于所述阻杆转轴上,所述挂杆下端设有挂杆转轴安装于所述挂杆轴孔中。
5、所述壳体上端设有供所述拨杆段穿过的阻杆通孔,所述壳体靠近固定环的一侧下部设有供所述固定环插入的开口,所述壳体上设有盖板。
6、所述凸轮下侧设有固定环抵接面,且所述固定环抵接面与所述挂接凸起部之间形成固定环凹槽,所述固定环与所述固定环抵接面接触并沿着所述固定环抵接面滑动出入所述固定环凹槽。
7、所述凸轮一侧设有第一弹簧安装孔,所述壳体一侧上端设有第二弹簧安装孔,所述复位弹簧下端安装于所述第一弹簧安装孔上、上端安装于所述第二弹簧安装孔上。
8、所述阻杆拨片呈u型折弯,且所述阻杆拨片一侧固定于所述阻杆的压杆段、另一侧设有第一抵接板与所述壳体上端内侧面相抵。
9、所述挂杆拨片呈u型折弯,且所述挂杆拨片一侧固定于所述壳体的侧板内侧、另一侧设有第二抵接板与所述挂杆压面相抵。
10、所述壳体一侧设有固定板,所述固定环一侧设有安装板。
11、锁定时所述凸轮通过所述固定环驱动转动,且转动到位后所述挂接凸起部与所述固定环挂接,同时所述阻杆的压杆段通过所述阻杆拨片驱动转动,转动到位后所述凸轮挂钩部与所述限位凸起部挂接锁定凸轮。
12、解锁时所述阻杆先转动使挂接凹槽与所述挂杆挂钩部挂接,同时使所述凸轮挂钩部与所述限位凸起部脱离,然后固定环移动带动所述凸轮转动,所述凸轮的侧弧面先压动所述挂杆凸起部,进而压动所述挂杆转动使所述挂杆挂钩部脱离所述阻杆上的挂接凹槽,此时所述阻杆的凸轮挂钩部与所述凸轮的侧弧面相抵,然后凸轮继续转动直至所述挂接凸起部与所述固定环脱离,脱离后凸轮在复位弹簧带动下继续转动至极限位置。
13、本发明的优点与积极效果为:
14、1、本发明的壳体和固定环分别固定于浮力块和框架上,并利用固定环与壳体内的凸轮挂接配合实现浮力块和框架的连接,同时利用壳体内的阻杆、挂杆等结构实现浮力块和框架连接时的锁定以及浮力块与框架拆卸时的解锁,结构简单、连接牢靠。
15、2、本发明通过拨动阻杆的拨杆段配合浮力块移动实现浮力块和框架连接锁定和解锁,操作简单方便。
16、3、本发明结构紧凑占用空间小,可隐藏于浮力块角端空隙中,不会影响浮力块外表面,有效保证机器人水动力特性,并且水下机器人外表更加美观。
技术特征:
1.一种用于水下机器人浮力材的隐藏式固定装置,其特征在于:包括固定环(1)、壳体(2)以及设于所述壳体(2)内的阻杆(3)、凸轮(5)、挂杆(6)和复位弹簧(8),所述阻杆(3)包括拨杆段(301)和压杆段(302),所述拨杆段(301)伸出至壳体(2)外部,所述拨杆段(301)和压杆段(302)连接处转动设于所述壳体(2)中并设有挂接凹槽(303),所述压杆段(302)上设有阻杆拨片(4)与壳体(2)上端内侧面相抵,所述压杆段(302)自由端设有凸轮挂钩部(304),所述凸轮(5)转动设于壳体(2)内,且所述凸轮(5)上侧设有与所述凸轮挂钩部(304)配合的限位凸起部(501),所述凸轮(5)下侧设有与所述固定环(1)挂接的挂接凸起部(502),所述限位凸起部(501)与挂接凸起部(502)之间设有侧弧面(506),所述挂杆(6)下端转动设于所述壳体(2)中,所述挂杆(6)上端设有与所述挂接凹槽(303)配合的挂杆挂钩部(601),所述挂杆(6)中部设有朝向所述凸轮(5)一侧的挂杆凸起部(602),所述挂杆(6)远离凸轮(5)一侧形成挂杆压面(604)与设于所述壳体(2)侧板内侧的挂杆拨片(7)相抵。
2.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述壳体(2)内设有凸轮转轴(205)、阻杆转轴(206)和挂杆轴孔(207),所述凸轮(5)上设有凸轮轴孔(505)套装于所述凸轮转轴(205)上,所述阻杆(3)的拨杆段(301)和压杆段(302)连接处设有阻杆轴孔(305)套装于所述阻杆转轴(206)上,所述挂杆(6)下端设有挂杆转轴(605)安装于所述挂杆轴孔(207)中。
3.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述壳体(2)上端设有供所述拨杆段(301)穿过的阻杆通孔(204),所述壳体(2)靠近固定环(1)的一侧下部设有供所述固定环(1)插入的开口(203),所述壳体(2)上设有盖板(202)。
4.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述凸轮(5)下侧设有固定环抵接面(503),且所述固定环抵接面(503)与所述挂接凸起部(502)之间形成固定环凹槽,所述固定环(1)与所述固定环抵接面(503)接触并沿着所述固定环抵接面(503)滑动出入所述固定环凹槽。
5.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述凸轮(5)一侧设有第一弹簧安装孔(504),所述壳体(2)一侧上端设有第二弹簧安装孔(208),所述复位弹簧(8)下端安装于所述第一弹簧安装孔(504)上、上端安装于所述第二弹簧安装孔(208)上。
6.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述阻杆拨片(4)呈u型折弯,且所述阻杆拨片(4)一侧固定于所述阻杆(3)的压杆段(302)、另一侧设有第一抵接板(401)与所述壳体(2)上端内侧面相抵。
7.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述挂杆拨片(7)呈u型折弯,且所述挂杆拨片(7)一侧固定于所述壳体(2)的侧板内侧、另一侧设有第二抵接板(701)与所述挂杆压面(604)相抵。
8.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:所述壳体(2)一侧设有固定板(201),所述固定环(1)一侧设有安装板(101)。
9.根据权利要求1所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:锁定时所述凸轮(5)通过所述固定环(1)驱动转动,且转动到位后所述挂接凸起部(502)与所述固定环(1)挂接,同时所述阻杆(3)的压杆段(302)通过所述阻杆拨片(4)驱动转动,转动到位后所述凸轮挂钩部(304)与所述限位凸起部(501)挂接锁定凸轮(5)。
10.根据权利要求9所述的用于水下机器人浮力材的隐藏式固定装置,其特征在于:解锁时所述阻杆(3)先转动使挂接凹槽(303)与所述挂杆挂钩部(601)挂接,同时使所述凸轮挂钩部(304)与所述限位凸起部(501)脱离,然后固定环(1)移动带动所述凸轮(5)转动,所述凸轮(5)的侧弧面(506)先压动所述挂杆凸起部(602),进而压动所述挂杆(6)转动使所述挂杆挂钩部(601)脱离所述阻杆(3)上的挂接凹槽(303),此时所述阻杆(3)的凸轮挂钩部(304)与所述凸轮(5)的侧弧面(506)相抵,然后凸轮(5)继续转动直至所述挂接凸起部(502)与所述固定环(1)脱离,脱离后凸轮(5)在复位弹簧(8)带动下继续转动至极限位置。
技术总结
本发明涉及一种用于水下机器人浮力材的隐藏式固定装置,其中阻杆包括拨杆段和压杆段,拨杆段伸出至壳体外部,拨杆段和压杆段连接处转动设于壳体中并设有挂接凹槽,压杆段上设有阻杆拨片与壳体上端内侧面相抵,压杆段自由端设有凸轮挂钩部,凸轮转动设于壳体内,且凸轮上侧设有与凸轮挂钩部配合的限位凸起部,凸轮下侧设有与固定环挂接的挂接凸起部,限位凸起部与挂接凸起部之间设有侧弧面,挂杆下端转动设于壳体中、上端设有与所述挂接凹槽配合的挂杆挂钩部,挂杆中部设有挂杆凸起部,挂杆远离凸轮一侧形成挂杆压面与设于壳体侧板内侧的挂杆拨片相抵。本发明方便浮力块和框架拆装,且可隐藏于浮力块角端空隙中,不会影响浮力块外表面。
技术研发人员:贾洪铎,张竺英,胡志强,王晓飞,王富强,王和伟
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!