一种北极冰区海底大地电磁仪器打捞回收装置与方法
1.本发明是关于海洋探测领域,特别是关于一种北极冰区海底大地电磁仪器打捞回收装置与方法。
背景技术:
2.海底仪器回收是海洋探测的重要环节之一,回收过程中的主要技术包含了海底仪器释放、浮出条件判断和海面仪器定位等技术。
3.海底仪器释放技术以声学释放技术最为常见,主要包含了甲板单元和声学释放器。船上的甲板单元通过声波与水下的声学释放器进行通信,除了可实现唤醒、测距、释放等功能外,还具备一定的定位能力,但是该定位方法受海冰界面影响导致声波路径复杂,使得传统的声学定位方法难以奏效,需要使用其他技术来辅助定位。
4.浮出条件判断技术主要用于减少功耗,即仅当仪器浮出海面时才开启定位,避免了在上浮过程中开启定位所导致的不必要的电量损耗,同时延长了回收系统的工作时间。浮出条件判断依赖于海底仪器上浮时的运动特征:1、当海底仪器开始释放时,进行一段时间的加速运动,直到某一速度临界点,仪器重力、海水浮力与海水阻力达到动态平衡,此后仪器主要做匀速上浮运动。仪器刚浮出海面时,由于浮力的突然减少,会有一个较大的向下加速度,该加速度可作为仪器浮出海面时的一个运动特征;2、由于仪器上浮过程中主要时间都是在进行匀速运动,因此上浮时间与海底深度接近线性关系,该线性关系可由过往数百次仪器回收记录中得到。于是,在确定海深的前提下,即可预估仪器的上浮时间,该上浮时间可以作为仪器浮出海面时的另一个运动特征。
5.海面仪器定位技术主要用来辅助船只搜寻打捞,具体技术包括视觉观察、无线电定位等。视觉观察的常见方式包括在仪器上捆绑红旗、安装高亮led灯等,这种方式实现较为简单,适合近距离观察,但在北极的回收环境下,红旗和led灯在极昼和有冰层时不易被观察到。无线电定位的常见方式包括无线电测向、铱星定位、gps&射频模块等。无线电测向利用天线间的信号强度差来判断目标方向,精度稍差。铱星定位主要以卫星作为通信媒介,实现超远程通信,但需要额外订购卫星服务,成本较高。gps&射频模块一般是通过gps模块获取位置,再通过射频模块将位置发送到射频接收终端,定位精度较高,但集成度较低且需额外设计船载无线电接收端。
6.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
7.本发明的目的在于提供一种北极冰区海底大地电磁仪器打捞回收装置与方法,其以声学释放、运动监测、延时预算、冰层着色和ais模块定位为主要技术的海底仪器回收方法,适用于多种海底仪器的回收打捞,具有高效率、低成本、低功耗、高集成度、高可靠性等特点。
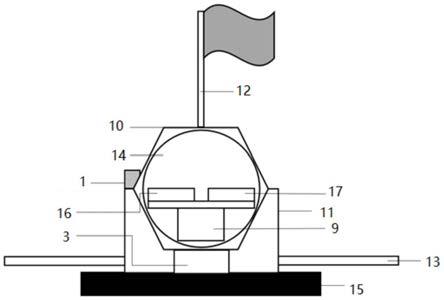
8.为实现上述目的,本发明提供了一种北极冰区海底大地电磁仪器打捞回收装置,包括保护壳、框架、旗杆和测量臂;所述框架的上方与所述保护壳相连接,所述框架的下方连接有配重块,所述框架的侧面与所述测量臂相连接;在所述框架与所述保护壳所围成的空间内设置有玻璃球,所述玻璃球的内部密封有采集电路和回收电路;所述采集电路包括用于海底参数测量的仪器电路,所述回收电路包括用于回收的水声通讯模块、加速度计、磁控开关、控制单元和ais模块;所述磁控开关根据水深设置其短刷写和长刷写的刷写次数,并将设置结果发送给所述控制单元;所述控制单元根据刷写次数推算出打捞回收装置的上浮延时时间;所述控制单元根据所述上升时间设定所述ais模块的唤醒时间;所述保护壳的上方设置有旗杆,所述旗杆的中部为中空结构,其内部填充有油性染料。
9.在本发明的一实施方式中,所述测量臂为管状结构。
10.在本发明的一实施方式中,所述换能器位于所述框架的上方,并且位于所述保护壳的外侧。
11.在本发明的一实施方式中,所述换能器和所述电腐蚀模块通过水密线缆与所述玻璃球内的回收电路中的水声通讯模块相连接。
12.在本发明的一实施方式中,所述电腐蚀模块位于所述框架的下方,用于与所述配重块相连接。
13.在本发明的一实施方式中,所述加速度计用于测量三轴方向的加速度,用于判断打捞回收装置的运动状态。
14.在本发明的一实施方式中,所述短刷写为所述磁控开关的导通时间少于3s,所述长刷写为所述磁控开关的导通时间不少于3s。
15.本发明还提供了一种用于上述北极冰区海底大地电磁仪器打捞回收装置的北极冰区海底大地电磁仪器打捞回收方法,其包括以下步骤:
16.s1:根据水深设置磁控开关的短刷写和长刷写的刷写次数,并对磁控开关进行刷写;
17.s2:控制单元根据刷写次数设定ais模块的唤醒时间;
18.s3:水声通讯模块收到船载水声甲板单元发送的回收指令后,激活电腐蚀模块,断开框架与配重块之间的连接;
19.s4:控制单元根据设定的ais模块的唤醒延时和加速度数据判断到达水面后,启动ais模块,向周边船载ais终端发送位置信息报文。
20.在本发明的一实施方式中,所述步骤s3还包括:周期性地读取加速度计的测量数据,根据加速度数据判断当前仪器的上浮状态。
21.在本发明的一实施方式中,所述步骤s4还包括:当从加速度计中读取到向下的加速度时,启动ais模块。
22.与现有技术相比,根据本发明的一种北极冰区海底大地电磁仪器打捞回收装置与方法,具有以下优点:1、集成现有ais模块至水密玻璃球内,无需单独设计gps模块和无线电通讯模块和独立开发船载无线电显示终端,利用船载标配的ais模块显示终端,具有通讯距离长、集成度高的优势。将ais模块集成至水密的玻璃球内,同时也克服了现有的ais模块水面终端无法到达海底的问题;2、考虑到北极水深,上浮耗时较长,该方法与装置根据水深通过磁控开关预设ais模块和led启动延时,有效的节省上升过程中的电池能量损耗,延长水
面有效作用时间;3、集成三轴加速度计,通过测量上浮前、上浮过程中、到达水面后的加速度变化情况,判断ais模块和高亮led的启动;4、借助以上方法圈定仪器大概位置后,借助与冰对比强烈的染料来缩小目标体的识别范围,在水面红旗杆中部安装染料释放模块,当红旗到达水面,受到冰层的阻挡后,旗杆主动折断,染料包破裂,释放到海水中,被染色的海水指示仪器的位置。
附图说明
23.图1是根据本发明一实施方式的一种北极冰区海底大地电磁仪器打捞回收装置的结构示意图;
24.图2是根据本发明一实施方式的一种北极冰区海底大地电磁仪器打捞回收装置的电路连接框图;
25.图3是根据本发明一实施方式的一种北极冰区海底大地电磁仪器打捞回收方法的流程图;
26.图4是根据本发明一实施方式的一种北极冰区海底大地电磁仪器打捞回收方法的逻辑判断流程图;
27.图5-1是根据本发明一实施方式的北极冰区海底大地电磁仪器打捞回收装置在海水中时的回收过程示意图;
28.图5-2是根据本发明一实施方式的北极冰区海底大地电磁仪器打捞回收装置的释放示意图;
29.图5-3是根据本发明一实施方式的北极冰区海底大地电磁仪器打捞回收装置的仪器上浮示意图;
30.图5-4是根据本发明一实施方式的北极冰区海底大地电磁仪器打捞回收装置的浮出示意图;
31.图5-5是根据本发明一实施方式的北极冰区海底大地电磁仪器打捞回收装置的冰层着色示意图。
32.主要附图标记说明:
33.1-换能器,2-水声通讯模块,3-电腐蚀模块,4-加速度计,5-磁控开关,6-控制单元,7-高亮led,8-ais模块,9-供电电池组,10-保护壳,11-框架,12-旗杆,13-测量臂,14-玻璃球,15-配重块,16-采集电路,17-回收电路。
具体实施方式
34.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
35.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
36.如图1至图4-5所示,根据本发明优选实施方式的一种北极冰区海底大地电磁仪器打捞回收装置,其包括换能器1、水声通讯模块2、电腐蚀模块3、加速度计4、磁控开关5、控制单元6、高亮led 7、ais模块(automatic identification system,船舶自动识别系统)8和
供电电池组9。
37.其中,控制单元6与水声通讯模块2、加速度计4、磁控开关5、高亮led 7和ais模块8相连,用于对上述模块进行控制。供电电池组9用于为整个打捞回收装置进行供电。
38.换能器1与水声通讯模块2相连接,用于声信号和电信号的转换。
39.水声通讯模块2还与电腐蚀模块3相连接,用于解析换能器1接收的电信号、向换能器1发送电信号、唤醒控制单元6和启动电腐蚀模块3。
40.电腐蚀模块3与脱钩器相连,可以在接收到释放信号后腐蚀脱钩器的片缆,将打捞回收装置与底部的配重块分离,从而释放打捞回收装置。
41.磁控开关5用于根据投放点位的水深设置其短刷写和长刷写的刷写次数,并发送给控制单元6。控制单元6通过刷写次数能够推算出打捞回收装置的上升时间,并根据该上升时间设定ais模块8的唤醒时间。因此,通过磁控开关5能够有效的节省上升过程中的电池能量损耗,延长水面有效作用时间。
42.具体地,磁控开关5在周围磁场低于某一阈值区间时输出高电平,高于该阈值区间时输出低电平。因此,当强磁铁贴近磁控开关5时,可以产生一个输出电平由高到低的下降沿中断,此过程记为一次磁控开关5的导通,使用控制单元6监测磁控开关5的导通时间和导通次数即可实现不同的功能。
43.当外部的强磁铁靠近一次磁控开关,将产生一个脉冲,根据靠近的时间的长短(快刷(短刷写)和慢刷(长刷写))将产生不同的短脉冲和长脉冲,通过检测短刷写和长刷写的次数能够设置ais的启动时间。在实际使用中,若磁控开关5的导通时间少于3s,则记为一次短刷写,若导通时间不少于3s,则记为一次长刷写。长刷写代表水深1000m,短刷写代表水深100m,因此,1次长刷写和2次短刷写代表水深1200m。因此,可以依据水深来判断对ais模块8设定的延时时间,以海底大地电磁仪器为例,水深4000米时,其上浮时间约为200分钟。
44.此外,若磁控开关5的导通时间大于10s,则记为一次超长刷写,此时控制单元6会关闭ais模块8,避免仪器被打捞后ais模块8一直运行消耗电量,进而影响下一次投放。
45.在投放该打捞回收装置之前,投放点位的海底深度是已知的,由船载探深设备获得,再根据海底深度人工使用强磁铁对磁控开关进行刷写,通过强磁铁进行刷写来设置ais的启动时间,之后再进行该打捞回收装置的投放。进行刷写的长刷写与短刷写也是通过人工控制刷写的时间来区分的。
46.加速度计4用于测量打捞回收装置三轴方向的加速度,并以此判断打捞回收装置的运动状态。当打捞回收装置脱掉配重块后上浮时,会存在一个瞬态加速度,根据加速度判断是否存在上浮启动,并且根据水深设定的延时,启动ais模块8和高亮led 7。
47.高亮led 7为高亮度的led灯,其能够发出高亮灯管,用于打捞回收装置在夜间的定位和识别。
48.ais模块8用于打捞回收装置的定位,以便于船载ais终端能够对打捞回收装置进行搜寻和打捞。
49.本发明的北极冰区海底大地电磁仪器打捞回收装置投入到水中前,磁控开关判断是否受到磁铁的短刷写,并将短刷写的次数计数,该计数将被转换为预计上浮时间。如果检测到超长刷写,打捞回收装置进入低功耗待机状态,等待释放指令。若水声通讯模块接收到释放指令,则唤醒打捞回收装置,之后打捞回收装置依据短刷写次数开始进行预计上浮时
间的计时,并周期性地读取加速度计的测量数据。若计时完成,或读取到一个较大的向下加速度,则说明此时仪器已浮出海面,系统将开启ais模块和高亮led,以便于船只的搜索打捞。
50.本发明的北极冰区海底大地电磁仪器打捞回收装置的结构如图2所示,该北极冰区海底大地电磁仪器打捞回收装置还包括保护壳10、框架11、旗杆12和测量臂13。
51.框架11的上方连接保护壳10,下方连接有配重块15,侧面设置有测量臂13。
52.在框架11与保护壳10所围成的空间内设置有玻璃球14,玻璃球14的内部密封有采集电路16、回收电路17和供电电池组9。采集电路为用于海底参数测量的仪器电路。回收电路包括用于回收的水声通讯模块2、加速度计4、磁控开关5、控制单元6和ais模块8。
53.配重块15为仪器下沉提供水下重量,收到回收命令后,启动电腐蚀模块,熔断后,配重块与仪器分离,仪器借助自身浮力上浮。
54.测量臂13为管状结构,优选为ppr管,用于防止打捞回收装置在上升或下降时发生侧翻,还可以用于加装与采集电路相连的传感器,对海底数据进行采集。
55.换能器1位于框架11的上方,保护壳10的外侧,能够便于接收船载ais终端发送的声信号。
56.电腐蚀模块3位于框架11的下方,用于与配重块15相连接。
57.换能器1和电腐蚀模块3通过水密线缆与玻璃球14内的回收电路中的水声通讯模块2连接。
58.高亮led 7位于玻璃球14的内部,启动时在玻璃球14的内部照亮。旗杆12设置在保护壳10的上方,旗杆12上设置有红色的旗帜,便于浮上水面时易于被发现。旗杆12的中部为中空结构,其内部填充有低密度难溶解的油性染料,当打捞回收装置在上浮遭遇冰层时,旗杆12主动折断,使中间的油性染料泄露并上浮,最终渗透进冰层中,使打捞船只更容易发现打捞回收装置,提高打捞回收工作的效率。
59.如图3-4所示,根据本发明优选实施方式的一种北极冰区海底大地电磁仪器打捞回收方法,其使用上述北极冰区海底大地电磁仪器打捞回收装置对电磁一起进行回收,该方法包括以下步骤:
60.s1:根据投放点位的水深设置磁控开关的短刷写和长刷写的刷写次数,并对磁控开关进行刷写;其中,投放点位的海底深度是已知的,由船载测深仪获得,之后再根据海底深度人工对磁控开关进行刷写,然后进行打捞回收装置的投放。
61.s2:控制单元根据磁控开关的刷写次数设定ais模块的唤醒时间;
62.s3:水声通讯模块收到船载水声甲板单元发送的回收指令后激活电腐蚀模块,断开框架与配重块之间的连接;
63.s4:控制单元在电腐蚀模块启动后,根据设定的ais模块的唤醒延时和加速度数据综合判断到达水面后,启动ais模块和高亮led,向周边船载ais终端发送位置信息报文。
64.之后,作业船收到定位报文后,前往精确位置实现快速打捞作业。
65.此外,在步骤s3中,还包括:周期性地读取加速度计的测量数据,根据加速度数据判断当前仪器的上浮状态。
66.之后,在步骤s4中,还包括:当从加速度计中读取到向下的加速度时,认为到达水面,启动ais模块和高亮led。
67.通过上述的步骤,根据读取加速度计的测量数据,即上浮前、上浮过程中、到达水面后的加速度变化情况,能够判断是否到达水面,进而启动ais模块和高亮led的启动,增强了对ais模块启动的判断。
68.本发明的北极冰区海底大地电磁仪器打捞回收装置的打捞回收的工作流程如图5-1、图5-2、图5-3、图5-4和图5-5所示。
69.图5-1中,打捞回收装置在海水中时与船只通过水声通信,浮出海面后与船只通过ais模块通信。
70.图5-2中,水面甲板单元通过换能器向打捞回收装置发出唤醒和测距指令,此时打捞回收装置的水声通讯模块将被唤醒并返回当前距离。若甲板单元继续发出释放指令,水声通讯模块将启动电腐蚀模块,使打捞回收装置与配重块分离,此时控制单元将被唤醒,开始上浮时间计时和监测打捞回收装置的加速度。
71.图5-3中,在打捞回收装置在上浮过程中,水面甲板单元将周期性的测量打捞回收装置的当前距离,以此判断打捞回收装置的上浮情况。
72.图5-4中,在无冰层阻隔时,打捞回收装置将正常浮出海面并开启ais模块,向船载ais终端发送自己的位置坐标。
73.图5-5中,在遭遇冰层阻隔的情况下,打捞回收装置顶部的旗杆将主动折断,释放出油性染料,使冰层被渗透着色,方便打捞船只搜索打捞。
74.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1